一种架空高压电线绝缘包覆机器人的取电方法与流程
1.本发明涉及配电网技术领域,特别是涉及一种架空高压电线绝缘包覆机器人的取电方法。
背景技术:
2.现有技术中,架空高压电线绝缘包覆机器人一般通过储蓄电池进行供电,储蓄电池电量用完后,架空高压电线绝缘包覆机器人需要取下进行充电,非常影响工作效率,所以我们提出了一种架空高压电线绝缘包覆机器人的取电方法。
技术实现要素:
3.为了解决架空高压电线绝缘包覆机器人一般通过储蓄电池进行供电,储蓄电池电量用完后,架空高压电线绝缘包覆机器人需要取下进行充电,非常影响工作效率的问题,本发明的目的是提供一种架空高压电线绝缘包覆机器人的取电方法。
4.为了实现上述目的,本发明采用如下技术方案:一种架空高压电线绝缘包覆机器人的取电方法,包括有以下步骤:
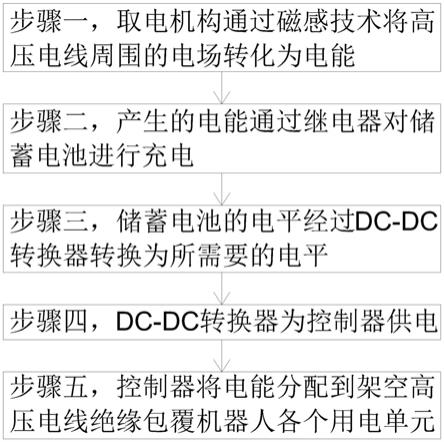
5.步骤一,取电机构通过磁感技术将高压电线周围的电场转化为电能;
6.步骤二,产生的电能通过继电器对储蓄电池进行充电;
7.步骤三,储蓄电池的电平经过dc-dc转换器转换为所需要的电平;
8.步骤四,dc-dc转换器为控制器供电;
9.步骤五,控制器将电能分配到架空高压电线绝缘包覆机器人各个用电单元;
10.所述取电机构包括有竖直设置的t型导轨,所述t型导轨的外壁滑动穿接有升降板,以及侧壁固定连接有上下对称设置的两个固定板,两个所述固定板之间转动连接有与升降板为螺纹连接的第一丝杠,所述升降板的侧壁固定连接有l型板,所述l型板的底部固定连接有u型框,所述u型框的内壁固定连接有导向杆,以及内壁转动穿接有第二丝杠,所述第二丝杠的外壁螺纹穿接有与导向杆为滑动穿接,且为对称设置的两个活动板,两个所述活动板的底部固定连接有对称设置的两个半弧永磁铁,两个所述半弧永磁铁的外壁缠绕有铜线。
11.优选的,所述铜线的两端分别与继电器的正负极连接。
12.优选的,所述继电器的正负极通过导线与储蓄电池充电端的正负极连接。
13.优选的,所述储蓄电池放电端的正负极与dc-dc转换器输入端的正负极连接。
14.优选的,所述dc-dc转换器输出端的正负极与控制器输入端的正负极连接。
15.优选的,所述控制器通过总线与架空高压电线绝缘包覆机器人各个用电单元连接。
16.与现有技术相比,本发明实现的有益效果:将取电机构安装在架空高压电线绝缘包覆机器人上,转动第一丝杠使得升降板在t型导轨上下降,则l型板下降,使得架空高压电线位于两个半弧永磁铁之间,转动第二丝杠使得两个活动板相向移动,则两个半弧永磁铁
靠近,架空高压电线绝缘包覆机器人在架空高压电线上移动,取电机构通过磁感技术将高压电线周围的电场转化为电能,产生的电能通过继电器对储蓄电池进行充电,储蓄电池的电平经过dc-dc转换器转换为所需要的电平,dc-dc转换器为控制器供电,控制器将电能分配到架空高压电线绝缘包覆机器人各个用电单元。
附图说明
17.以下结合附图和具体实施方式来进一步详细说明本发明:
18.图1为本发明的流程的示意图;
19.图2为本发明的取电电性连接的示意图;
20.图3为本发明的取电机构的结构示意图。
21.图中:1-取电机构、2-继电器、3-储蓄电池、31-dc-dc转换器、4-控制器、5-t型导轨、6-升降板、7-固定板、8-第一丝杠、9-l型板、10-u型框、11-导向杆、12-第二丝杠、13-活动板、14-半弧永磁铁、15-铜线。
具体实施方式
22.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
23.请参阅图1至图2。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
24.本发明提供一种技术方案:一种架空高压电线绝缘包覆机器人的取电方法,包括有以下步骤:
25.步骤一,取电机构1通过磁感技术将高压电线周围的电场转化为电能;
26.步骤二,产生的电能通过继电器2对储蓄电池3进行充电;
27.步骤三,储蓄电池3的电平经过dc-dc转换器31转换为所需要的电平;
28.步骤四,dc-dc转换器31为控制器4供电;
29.步骤五,控制器4将电能分配到架空高压电线绝缘包覆机器人各个用电单元;
30.所述取电机构1包括有竖直设置的t型导轨5,所述t型导轨5的外壁滑动穿接有升降板6,以及侧壁固定连接有上下对称设置的两个固定板7,两个所述固定板7之间转动连接有与升降板6为螺纹连接的第一丝杠8,所述升降板6的侧壁固定连接有l型板9,所述l型板9的底部固定连接有u型框10,所述u型框10的内壁固定连接有导向杆11,以及内壁转动穿接有第二丝杠12,所述第二丝杠12的外壁螺纹穿接有与导向杆11为滑动穿接,且为对称设置的两个活动板13,两个所述活动板13的底部固定连接有对称设置的两个半弧永磁铁14,两个所述半弧永磁铁14的外壁缠绕有铜线15。
31.所述铜线15的两端分别与继电器2的正负极连接。
32.所述继电器2的正负极通过导线与储蓄电池3充电端的正负极连接。
33.所述储蓄电池3放电端的正负极与dc-dc转换器31输入端的正负极连接。
34.所述dc-dc转换器31输出端的正负极与控制器4输入端的正负极连接。
35.所述控制器4通过总线与架空高压电线绝缘包覆机器人各个用电单元连接。
36.使用时,将取电机构1安装在架空高压电线绝缘包覆机器人上,转动第一丝杠8使得升降板6在t型导轨5上下降,则l型板9下降,使得架空高压电线位于两个半弧永磁铁14之间,转动第二丝杠12使得两个活动板13相向移动,则两个半弧永磁铁14靠近,架空高压电线绝缘包覆机器人在架空高压电线上移动,取电机构1通过磁感技术将高压电线周围的电场转化为电能,产生的电能通过继电器2对储蓄电池3进行充电,储蓄电池3的电平经过dc-dc转换器31转换为所需要的电平,dc-dc转换器31为控制器4供电,控制器4将电能分配到架空高压电线绝缘包覆机器人各个用电单元。
37.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
技术特征:
1.一种架空高压电线绝缘包覆机器人的取电方法,其特征在于,包括有以下步骤:步骤一,取电机构(1)通过磁感技术将高压电线周围的电场转化为电能;步骤二,产生的电能通过继电器(2)对储蓄电池(3)进行充电;步骤三,储蓄电池(3)的电平经过dc-dc转换器(31)转换为所需要的电平;步骤四,dc-dc转换器(31)为控制器(4)供电;步骤五,控制器(4)将电能分配到架空高压电线绝缘包覆机器人各个用电单元;所述取电机构(1)包括有竖直设置的t型导轨(5),所述t型导轨(5)的外壁滑动穿接有升降板(6),以及侧壁固定连接有上下对称设置的两个固定板(7),两个所述固定板(7)之间转动连接有与升降板(6)为螺纹连接的第一丝杠(8),所述升降板(6)的侧壁固定连接有l型板(9),所述l型板(9)的底部固定连接有u型框(10),所述u型框(10)的内壁固定连接有导向杆(11),以及内壁转动穿接有第二丝杠(12),所述第二丝杠(12)的外壁螺纹穿接有与导向杆(11)为滑动穿接,且为对称设置的两个活动板(13),两个所述活动板(13)的底部固定连接有对称设置的两个半弧永磁铁(14),两个所述半弧永磁铁(14)的外壁缠绕有铜线(15)。2.根据权利要求1所述的一种架空高压电线绝缘包覆机器人的取电方法,其特征在于:所述铜线(15)的两端分别与继电器(2)的正负极连接。3.根据权利要求1所述的一种架空高压电线绝缘包覆机器人的取电方法,其特征在于:所述继电器(2)的正负极通过导线与储蓄电池(3)充电端的正负极连接。4.根据权利要求1所述的一种架空高压电线绝缘包覆机器人的取电方法,其特征在于:所述储蓄电池(3)放电端的正负极与dc-dc转换器(31)输入端的正负极连接。5.根据权利要求1所述的一种架空高压电线绝缘包覆机器人的取电方法,其特征在于:所述dc-dc转换器(31)输出端的正负极与控制器(4)输入端的正负极连接。6.根据权利要求1所述的一种架空高压电线绝缘包覆机器人的取电方法,其特征在于:所述控制器(4)通过总线与架空高压电线绝缘包覆机器人各个用电单元连接。
技术总结
本发明公开了一种架空高压电线绝缘包覆机器人的取电方法,包括有以下步骤:步骤一,取电机构通过磁感技术将高压电线周围的电场转化为电能;步骤二,产生的电能通过继电器对储蓄电池进行充电;步骤三,储蓄电池的电平经过DC-DC转换器转换为所需要的电平;步骤四,DC-DC转换器为控制器供电;步骤五,控制器将电能分配到架空高压电线绝缘包覆机器人各个用电单元,本发明涉及配电网技术领域。本发明,解决架空高压电线绝缘包覆机器人一般通过储蓄电池进行供电,储蓄电池电量用完后,架空高压电线绝缘包覆机器人需要取下进行充电,非常影响工作效率的问题。工作效率的问题。工作效率的问题。
技术研发人员:高垣照 杨琦 鲁露露 黄贵增 张淼 高健涛
受保护的技术使用者:盛天智能机器人(广东)有限责任公司
技术研发日:2022.01.14
技术公布日:2022/4/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1