一种适用于旋转部件自锁定的无接触式永磁锁定器
1.本发明属于航天设备技术领域,具体涉及一种适用于旋转部件自锁定的无接触式永磁锁定器。
背景技术:
2.航天器上的一些扫描设备在处于非工作状态时,常常需要对其旋转部件进行锁定,避免其无规律运动引起设备部件之间发生碰撞。由于空间物体不会急加减速,所以锁定力矩一般只需要零点几牛米左右。这些扫描设备一般都是由特种电机驱动的,正常工作时转子部分需要连续或者往复旋转,运动的自由度是圆周方向。现阶段的解决措施是,设计者通过在驱动单元上额外设计机械或者电磁原理的锁定器来实现这一功能。但带来的明显缺点,一是锁定器锁定或者解锁时需要供电,增加了能量消耗;二是存在着锁定不可靠和解锁失效的可能性,大大降低了设备工作的可靠性。所以,该类锁定器的使用是要非常慎重的。
3.实际上,解决这个锁定问题最佳的方法,是能有一种特种电机,在圆周方向既具有伺服驱动力矩,又具有锁定力矩,这样就完美地实现了两个功能的统一。具备这种功能的特种电机有两种。一种是感应子式步进电机,它的优点是无接触,缺点一是工作气隙极小对大温差环境应用不利,二是定位力矩偏小无法达到零点几牛米这个量级。另一种是超声波电机,它的优点是驱动力矩大,缺点一是接触式工作存在着寿命短的问题,二是磨损后可能产生多余物,对星上其他设备的可靠工作带来隐患。
4.因此,就现有的技术和产品来看,尚无一种具有自锁定功能的特种电机,能够满足航天设备的这种特殊锁定需求。
技术实现要素:
5.本发明的目的在于通过特殊磁路设计,在不通电的情况下,利用永磁磁钢产生的磁通和定子铁心与转子铁心上的小齿齿数相同或者整倍数关系产生耦合力矩,实现对转子铁心的锁定功能。
6.本发明的无接触式永磁锁定器具有体积小、重量轻、高可靠和节约能源等优点,尤其适用于满足航天设备上转动部件非工作状态下的锁定需求。
7.为实现上述目的,本发明采取的技术方案如下:
8.方案一:一种适用于旋转部件自锁定的无接触式永磁锁定器,由转子铁心、永磁磁钢及两段定子铁心组成;所述永磁磁钢设置在两段定子铁心之间且三者固定连接,永磁磁钢以及两段定子铁心均套装在转子铁心的外侧,两段定子铁心与转子铁心之间设有相同的气隙,所述转子铁心的外圆周面以及两段定子铁心的内圆周面上皆均布加工有数个小齿,定子铁心和转子铁心上的数个小齿齿数相等或者是整倍数关系,两段定子铁心上的数个小齿一一对应设置。
9.进一步的是,所述永磁磁钢的磁场方向为轴向,由所述转子铁心、两个气隙和两段定子铁心构成闭合磁路。
10.方案二:一种适用于旋转部件自锁定的无接触式永磁锁定器,由永磁磁钢、定子铁心及两段转子铁心组成;所述永磁磁钢设置在两段转子铁心之间且三者固定连接,所述定子铁心套装在两段转子铁心以及永磁磁钢的外侧,两段转子铁心与定子铁心之间设有相同的气隙,定子铁心的内圆周面以及两段转子铁心的外圆周面上皆均布加工有数个小齿,定子铁心和转子铁心上的数个小齿齿数相等或者是整倍数关系,两段转子铁心上的数个小齿一一对应设置。
11.进一步的是,所述永磁磁钢的磁场方向为轴向,由所述两段转子铁心、定子铁心和两个气隙构成闭合磁路。
12.本发明相对于现有技术的有益效果是:本发明设计了一种适用于旋转部件自锁定的无接触式永磁锁定器。在航天设备非工作状态下需要锁定时,通过锁定器上的永磁磁钢提供磁通,使旋转部件可以在圆周上极多的位置处实现自锁定。该锁定器具有安装空间小、重量轻、安装方便等优点,锁定时无需通电,工作可靠,可以满足航天设备运动部件的自锁定需求。
附图说明
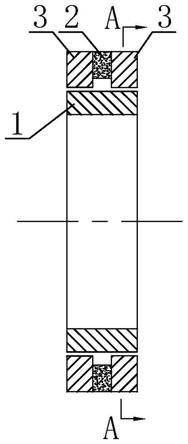
13.图1是本发明的一种适用于旋转部件自锁定的无接触式永磁锁定器的方案一的主剖视图;
14.图2是图1的a-a截面的剖视图;
15.图3是锁定力矩的变化规律图,其中:横坐标θs表示圆周方向的角度,纵坐标tem表示锁定器产生的电磁力矩;
16.图4是本发明的一种适用于旋转部件自锁定的无接触式永磁锁定器的方案二的主剖视图;
17.图5是图4的b-b截面的剖视图。
18.上述附图中涉及的部件名称及标号如下:
19.转子铁心1、永磁磁钢2、定子铁心3、小齿4。
具体实施方式
20.具体实施方式一:如图1、图2所示,本实施方式披露了一种适用于旋转部件自锁定的无接触式永磁锁定器,由转子铁心1、永磁磁钢2及两段定子铁心3组成;所述永磁磁钢2设置在两段定子铁心3之间且三者固定连接,永磁磁钢2以及两段定子铁心3均套装在转子铁心1的外侧,两段定子铁心3与转子铁心1之间设有相同的气隙,所述转子铁心1的外圆周面以及两段定子铁心3的内圆周面上皆均布加工有数个小齿4,定子铁心3和转子铁心1上的数个小齿4齿数相等或者是整倍数关系,两段定子铁心3上的数个小齿4一一对应设置。
21.具体实施方式二:如图1、图2所示,本实施方式是对具体实施方式一作出的进一步说明,所述永磁磁钢2的磁场方向为轴向,由所述转子铁心1、两个气隙和两段定子铁心3构成闭合磁路。
22.具体实施方式三:如图2所示,本实施方式是对具体实施方式一作出的进一步说明,所述定子铁心3上的小齿4齿数与转子铁心1上的小齿4齿数相同,均为120个或以上;齿数越多锁定效果越好。
23.具体实施方式四:如图1、图2所示,本实施方式是对具体实施方式一作出的进一步说明,所述两段定子铁心3与转子铁心1之间的气隙均为0.3mm。
24.具体实施方式五:如图4、图5所示,本实施方式披露了一种适用于旋转部件自锁定的无接触式永磁锁定器,由永磁磁钢2、定子铁心3及两段转子铁心1组成;所述永磁磁钢2设置在两段转子铁心1之间且三者固定连接,所述定子铁心3套装在两段转子铁心1以及永磁磁钢2的外侧,两段转子铁心1与定子铁心3之间设有相同的气隙,定子铁心3的内圆周面以及两段转子铁心1的外圆周面上皆均布加工有数个小齿4,定子铁心3和转子铁心1上的数个小齿4齿数相等或者是整倍数关系,两段转子铁心1上的数个小齿4一一对应设置。
25.具体实施方式六:如图4、图5所示,本实施方式是对具体实施方式五作出的进一步说明,所述永磁磁钢2的磁场方向为轴向,由所述两段转子铁心1、定子铁心3和两个气隙构成闭合磁路。
26.具体实施方式七:如图5所示,本实施方式是对具体实施方式五作出的进一步说明,所述定子铁心3上的小齿4齿数与转子铁心1上的小齿4齿数相同,均为120个或以上;齿数越多锁定效果越好。
27.具体实施方式八:如图4、图5所示,本实施方式是对具体实施方式五作出的进一步说明,所述定子铁心3与两段转子铁心1之间的气隙均为0.3mm。
28.一、本发明的无接触式永磁锁定器的方案一的关键技术如下:
29.1、方案一的关键技术之一是,定子铁心3为两段分体式结构,中间装有永磁磁钢2,而转子铁心1是整体结构。
30.2、方案一的关键技术之二是,定子铁心3和转子铁心1上都是只有小齿4没有大齿,不需要通电线圈。
31.3、方案一的关键技术之三是,定子铁心3和转子铁心1上的小齿4的齿数必须要完全相等或者是整倍数关系。
32.4、方案一的关键技术之四是,两段定子铁心3上的数个小齿4必须要完全对齐(一一对应)设置。
33.二、本发明的无接触式永磁锁定器的方案二的关键技术如下:
34.1、方案二的关键技术之一是,转子铁心1为两段分体式结构,中间装有永磁磁钢2,而定子铁心3是整体结构。
35.2、方案二的关键技术之二是,定子铁心3和转子铁心1上都是只有小齿4没有大齿,不需要通电线圈。
36.3、方案二的关键技术之三是,定子铁心3和转子铁心1上的小齿4的齿数必须要完全相等或者是整倍数关系。
37.4、方案二的关键技术之四是,两段转子铁心1上的数个小齿4必须要完全对齐(一一对应)设置。
38.以方案一为例,对本发明的无接触式永磁锁定器的基本原理具体说明如下:
39.(1)如图1所示,本发明的无接触式永磁锁定器由两段定子铁心3、永磁磁钢2、转子铁心1组成。永磁磁钢2的磁场方向为轴向,通过两段定子铁心3、转子铁心1和两个气隙构成闭合磁路。
40.(2)如图2所示,本发明的无接触式永磁锁定器在定子铁心3的内圆周面以及转子
铁心1的外圆周面上分别均布加工有数个小齿4,而且二者的小齿4的齿数必须完全相等,如都是200个;或者正好是整倍数关系,如定子铁心3上的小齿4的齿数是200个,转子铁心1上的小齿4的齿数是100个。
41.(3)为了保证产生最大的锁定力矩,两段定子铁心3上的小齿4也必须要完全对齐(即一一相对应),只有这样,定子铁心3与转子铁心1上所有的小齿4产生的磁阻力矩的方向才会是相同的,才能在最小的体积下产生最大的锁定力矩。
42.(4)在以上这些结构保证的前提下,由于气隙磁阻的最小化特点,最稳定的位置就是定子铁心3和转子铁心1上的小齿4对齐的位置。当转子铁心1产生一定的扰动时,电磁力矩会使得转子铁心1回复到稳定平衡位置。所产生的锁定力矩的变化规律如图3所示,每个波形力矩的峰值相同,大小取决于具体结构参数;力矩的频率就是锁定位置的次数,等于定子铁心3的齿数和转子铁心1的齿数的最大公约数。
43.为了得到更平滑的锁定效果,在锁定力矩峰值不变的前提下,显然锁定位置的次数越多,则分辨率越好,所以最佳的设计方案就是定子铁心3的小齿4和转子铁心1的小齿4齿数相同,一般都选取120个以上。最大齿数取决于转子铁心1和定子铁心3的机械尺寸,并且小齿4不能过窄,要满足小齿4的强度需要。
44.实施例1:
45.结合图1说明本实施例,本实施例披露了一种适用于旋转部件自锁定的无接触式永磁锁定器,其定子铁心3的外径为100mm,转子铁心1的内径为60mm,锁定器的总轴向长度为8mm,永磁磁钢2的厚度为2mm,定子铁心3与转子铁心1之间的气隙为0.3mm,定子铁心3与转子铁心1的小齿4的齿数都是180个。最后通过有限元计算得到锁定力矩峰值为0.16nm,交变次数为180次,达到了预期的设计效果。
46.需要说明的是:
47.(1)从原理上看,转子铁心1分段并加入永磁磁钢2而定子铁心3是整体结构的(即方案二。如图4所示),或者定子铁心3和转子铁心1都分段,并加入永磁磁钢2,其基本原理与方案一和方案二是一样的。
48.(2)本锁定器只是对转动部件提供锁定力矩,转子铁心1的伺服驱动力矩由其他特种电机提供。
49.(3)本锁定器虽然外形上看和永磁感应子式步进电机或者开关磁阻电机很类似,但原理上存在着三个本质区别:(a)本锁定器没有电磁线圈无需通电;(b)本锁定器的定子铁心3和转子铁心1的齿数完全相等,或者正好是整倍数关系;(c)在只有一段转子铁心1的前提下,本锁定器的两段定子铁心3上的数个小齿4必须完全对齐。而永磁感应子式步进电机或者开关磁阻电机只要满足了上面三点中的任何一点,都是无法满足产生切向的电磁转矩,从而无法正常工作的。
50.以上仅为本发明较佳的具体实施方式,但本发明的保护范围,并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1