一种电动三轮车电机离线参数辨识系统的制作方法
1.本发明属于电机控制领域,具体涉及一种电动三轮车电机离线参数辨识系统。
背景技术:
2.电动三轮车作为一种操作容易、性价比高、污染小的交通工具,深受广大群众的欢迎与喜爱,其动力系统主要由后桥、变速箱以及电机组成。后桥用于支撑与驱动电动三轮车的后轮,变速箱用于实现电机转速与车轮转速之间的比例转换。作为动力系统心脏的电机,其特性的优劣决定着电动三轮车运行性能的好坏。近年来,永磁材料技术得到了极大的发展,作为其主要产品之一,无刷直流电机(brushless dc motor, bldcm)由于具有转矩电流比大、运行效率高、可靠性强等优点,在电动三轮车行业中的应用也越来越广泛,因此对电动三轮车无刷直流电机的研究非常具有潜力。
3.bldcm的定子电阻、定子电感、反电动势系数等参数不仅是实际生产中选型的重要参考,而且是很多控制算法(自抗扰控制、模型预测控制、无差拍预测控制、干扰观测器控制等)中的核心控制参数,其测量数值的精确度决定着工程项目以及学术研究质量的高低。但有研究表明,bldcm的定子电阻、定子电感、反电动势系数等参数很容易在电机老化受损、持久高温运行后发生变化,从而对电机控制系统的性能产生不利影响。因此,研制一款能对bldcm当前状态的参数进行辨识的算法,不管是对工程中的选型还是科研中的算法设计都具有极高的研究价值。
4.bldcm的参数辨识分为在线与离线两种。在线参数辨识是一种能在电机控制中实时更新参数辨识结果的方法,实时性强;但是该方法复杂度较高,且需要驱动性能与采样精度较高的硬件电路。离线参数辨识只能辨识电机在某一时段的参数,但是该方法较为简单且不需要额外增加过多硬件,成本较低,这里采用离线辨识。
5.bldcm的驱动技术主要有矢量控制和方波控制。矢量控制虽然稳定性非常好,但是算法的复杂度较高,且开关损耗较大,硬件成本较高;与矢量控制相比,方波控制结构简单,且开关损耗较小,对控制器硬件的质量要求较低。这里采用方波控制,该方式通过pwm调制对电机进行驱动,基于六步换相法实现电机的导通状态转换。方波控制有开环方波控制与双闭环方波控制。在离线参数辨识中,为了保证电机驱动方案的适配性与可靠性,这里选择上述驱动方式中复杂度最低的开环方波控制对bldcm进行驱动。
6.对bldcm的离线参数辨识属于电磁场逆问题。近年来,进化计算方法已被广泛应用于具有复杂目标函数的电磁场逆问题的求解,其中最为常用的就是粒子群优化(particle swarm optimization, pso),该策略虽然能使算法快速收敛,但容易陷入局部最优,特别是对于具有多个局部最优解的问题。鲸鱼优化算法(whale optimization algorithm, woa)是seyedali mirjalili和andrew lewis在2016年提出的一种新型进化计算方法,与其他进化计算方法不同的是,woa的搜索方式可以分为三个阶段,这三个阶段可以使woa比大多数进化计算方法更有效地平衡局部搜索和与全局搜索能力。然而,woa的这种搜索机制也存在一些缺点,例如,如果个体向当前群体中较差的个体靠拢,woa的收敛速度将受到负面影响;
此外,如果所有个体都向当前的最优个体学习,则woa可能会进入早熟收敛状态。
7.一般方法是基于dq坐标系下的dq轴电流对bldcm进行离线参数辨识,但是dq坐标系中的数学模型假设bldcm的反电动势波形为正弦波,而实际情况中bldcm的反电动势波形一般为梯形波,因此一般方法对反电动势的建模存在误差,进而会加大反电动势系数的辨识误差。如何科学地选取能真实反应bldcm参数性质的数据段、如何尽量降低参数辨识数据集的规模以减少运算量,是急需解决的难题。
技术实现要素:
8.针对现有技术所存在的上述技术缺陷,本发明提供了一种电动三轮车电机离线参数辨识系统(off line parameter identification for electric tricycle motor, olpietm)。该系统能提高电动三轮车电机的建模精度并减小辨识运算量,同时有着较高的参数辨识收敛速度与求解精度。
9.本发明提供的电动三轮车电机离线参数辨识系统(olpietm),其包括波形居中均值模块(waveform centered averaging, wca)和加速型动态全息混沌寻优模块(accelerated dynamic fully informed chaotic optimization, adfico)。
10.所述的波形居中均值模块(wca)基于状态量采样周期、非换相相电流绝对值的总周期数、波形居中截取比例对a相霍尔信号、b相霍尔信号、c相霍尔信号、a相相电流、b相相电流、c相相电流进行采样,经波形居中截取与波形均值化得到平均转速、平均非换相相电流绝对值序列 ,其中,为波形居中截取数据量;将作为加速型动态全息混沌寻优模块的参数辨识数据集,并给出的属性指标:波形居中截取数据量、单周期时间序列;所述的加速型动态全息混沌寻优模块(adfico)基于开环方波控制驱动占空比、逆变器直流母线电压、、、、,经过动态全息学习、基于梯度补偿的加速搜索、基于混沌映射的个体变异的处理,对定子电阻辨识值、定子电感辨识值、反电动势系数辨识值进行离线辨识。
11.本发明的有益技术效果为:(1)本发明中的波形居中均值模块(wca),能提高电动三轮车电机的建模精度,以及降低用于参数辨识的数据集规模以减小运算量。
12.(2)本发明中的加速型动态全息混沌优化模块(adfico),相比传统进化计算方法拥有更快的收敛速度、更高的求解精度以及更强的全局搜索能力,参数辨识效率大大提高。
附图说明
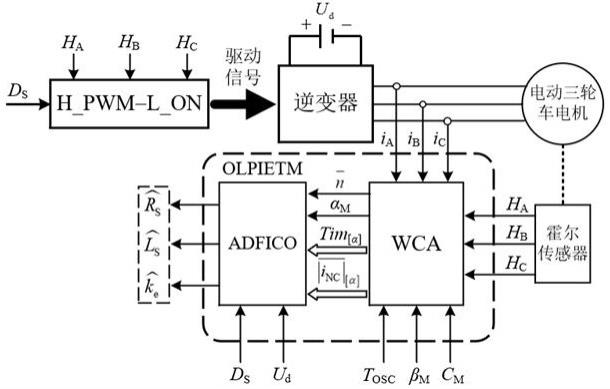
13.图1为本发明的波形居中截取示意图;图2 为本发明的波形均值化示意图;图3 为本发明adfico的寻优流程示意图;图4 为本发明dfil的邻域拓扑图;图5 为本发明的系统框图;
图6为=0.30,=1.9 n
·
m时的波形图;图7为 =0.34, =2.3 n
·
m时的波形图;图8为 =0.38, =2.7 n
·
m时的波形图;图9为
ꢀꢀ
=0.30, =1.9 n
·
m时的参数辨识收敛曲线;图10为 =0.34, =2.3 n
·
m时的参数辨识收敛曲线;图11为 =0.38, =2.7 n
·
m时的参数辨识收敛曲线。
具体实施方式
14.下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
15.本发明的电动三轮车电机离线参数辨识系统(olpietm),包括:波形居中均值模块(wca)与加速型动态全息混沌优化模块(adfico)。
16.所述的wca基于状态量采样周期、非换相相电流绝对值的总周期数、波形居中截取比例对a相霍尔信号、b相霍尔信号、c相霍尔信号、a相相电流、b相相电流、c相相电流进行采样,经波形居中截取与波形均值化得到平均转速、平均非换相相电流绝对值序列 ,其中,为波形居中截取数据量;将作为加速型动态全息混沌寻优模块的参数辨识数据集,并给出的属性指标:波形居中截取数据量、单周期时间序列;所述的adfico基于开环方波控制驱动占空比、逆变器直流母线电压、、、、,经过动态全息学习(dynamic fully informed learning, dfil)、基于梯度补偿的加速搜索(gradient compensation based accelerated search, gcbas)、基于混沌映射的个体变异(chaotic map based individual mutation, cmbim)的处理,对定子电阻辨识值、定子电感辨识值、反电动势系数辨识值进行离线辨识。
17.本发明的原理如下:一般算法是基于dq坐标系下的dq轴电流对bldcm进行离线参数辨识,但是dq坐标系中的数学模型假设bldcm的反电动势波形为正弦波,而实际情况中bldcm的反电动势波形一般为梯形波,因此一般算法对反电动势的建模存在误差,进而会加大反电动势系数的辨识误差。为了更加科学地选取能真实反应bldcm参数性质的数据段,本发明基于bldcm在开环方波控制下三相坐标系中的数学模型,提出一种波形居中均值模块(wca)。
18.在wca中,对、、进行组合得到合成霍尔信号hall为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)根据hall选出、、中的非换相相电流,通过取绝对值操作可以得到非换相相电流绝对值。得到的波形后,首先要进行波形居中截取处理,其示意图如图1所示。
19.图1中,的波形呈周期性变化,每当hall变化时,将进入下一个周期。这里
取个周期的波形,个周期的总长度为。根据与可计算出电机的平均转速为:(2)其中,为电机的极对数。
20.根据、、与(《90%)可计算出波形居中截取数据量为:(3)在的每个周期中,为了避免换相阶段引起的波形失真以提高建模精度,这里取最靠中间的个采样值,即图1中时间段的部分,这样可以得到个周期的居中截取数据集(;)。为第个周期的第个的采样值。
21.为了降低用于参数辨识的数据集规模以减小运算量,这里对波形居中截取后的(;)进行波形均值化处理,如图2所示,为经波形均值化处理后的平均非换相相电流绝对值。
22.首先,基于给出单周期时间序列(),该序列是项数为、首项为0、公差为的等差数列,表达式为:(4)然后基于(;),通过取处个的平均值,可得到平均非换相相电流绝对值序列(),其表达式为:(5)如图2所示,对应的时间点为。
23.为了基于实现对电机参数的离线辨识,本发明提出了一种加速型动态全息混沌优化模块(adfico)。adfico先在参数辨识范围内随机产生n个个体,即n个初始参数辨识值,然后通过个体的进化实现参数寻优。
24.建立离线辨识目标函数fm为:(6)其中,、、分别为、、的最小值,、、分别为、
、的最大值;为平均非换相相电流绝对值初值的辨识值,加速型动态全息混沌寻优模块将4维变量作为每个个体的位置,将与分别作为参数辨识范围的下限与上限,将作为个体的适应度。越小,表示对应的个体越优,即参数辨识值越好。
25.adfico的寻优流程示意图如图3所示,包含动态全息学习(dfil)、基于梯度补偿的加速搜索(gcbas)、基于混沌映射的个体变异(cmbim)三个主要处理过程。在adfico中,首先进行种群初始化得到、、、的初始解,然后基于dfil实现种群的位置更新,接着采用gcbas对种群的位置进行补偿,最后使用cmbim实现种群多样化。当达到终止条件时,算法结束,否则将继续循环往复。
26.为了更好地平衡adfico的全局搜索与局部搜索能力并减少其陷入早熟收敛的概率,本发明采用动态全息学习机制(dynamic fully informed learning, dfil)。随着优化过程的进行,dfil逐渐增加每个个体的邻域拓扑连通度,即每个个体拥有的邻居数。定义的表达式为:(7)其中,为向下取整,n为种群规模,t为当前迭代次数,t为最大迭代次数。和分别为连通度初始比例与连通度最终比例,应保证《。
27.在dfil中,个体之间为有向连接,且每个个体选择距自己最远的个个体作为邻居。dfil的邻域拓扑如图4所示,当为1时,个体j的邻居是k,而个体k的邻居不是j而是i。每次增加时,每个个体都会重新选择距离自己最远的个个体作为邻居。例如,更新后,增加到2,个体i的邻居是两个距自己最远的个体,即k和m。
28.为了便于计算,将个体i的邻居k(k=1, 2,
ꢀ…
, )的适应度归一化为:(8)然后定义个体i的全息局部吸引子为:(9)式中,d是搜索空间维度的序号,是个体i的权重,是满足标准正态分布的随机数,是个体i的邻居k的位置。被定义为:
(10)的初始值为。随着t的增加,最优个体g的权重逐渐增加到的总和,其他个体的权重逐渐减少到0,使得全息局部吸引子逐渐向最优个体转移。每个个体通过向它的靠拢实现位置更新。
29.为了进一步加快adfico的收敛速度,本发明采用基于梯度补偿的加速搜索(gradient compensation based accelerated search, gcbas),对每个个体每一维度d上的位置信息进行补偿。当一个个体在d上的位置信息与t-1时的相同时,令补偿量为0;否则令补偿量为一种自适应离散负梯度项,其值等于离散负梯度与自适应搜索步长的乘积。
30.在gcbas中,定义加速搜索位置更新公式为:(11)其中,为个体适应度。为步长约束系数,用于对自适应搜索步长的范围进行限制。和分别是的下限和上限。定义容错基底为:(12)gcbas主要通过增加个体位置的偏移实现了加速搜索。
31.为了使adfico能更有效地跳出可能出现的进化停滞状态,本发明采用基于混沌映射的个体变异(chaotic map based individual mutation, cmbim)。在cmbim中,一部分个体将在的迭代过程中会产生混沌变异,定义混沌变异概率与混沌变异个体数的表达式如下:(13)(14)式中,为混沌变异概率控制系数,越小,混沌变异概率越大。和分别是混
沌变异初始比例与混沌变异最终比例,应保证》。
32.这里提出种群聚合度来衡量种群的聚集状态。如果太小,则认为种群进化处于停滞状态。定义为:(15)其中,是的平均值。如果出现以下状态则认为种群进化处于停滞状态:(16)式中,r是均匀分布在[0,1]中的一个随机数,是种群聚合度阈值。
[0033]
如果个体处于进化停滞状态,则使最差的个个体发生如下的变异:(17)(18)其中,为当前最优个体的位置,(m=1, 2,
ꢀ…
, )是变异个体的位置。是变异初值控制参数,用来控制的范围。是变异发散系数,越大,混沌变异越发散。是变异分布系数,用来限制待变异子种群的位置范围。是变异反归一化控制系数,用来调整混沌变异后子种群的位置范围。最差的个个体的位置将被取代。
[0034]
最终,olpietm的系统框图如图5所示。当系统工作时,wca基于、、,负责对、、、、、进行采样,然后经波形居中均值与波形均值化两大操作得出、(),将作为adfico的离线辨识数据集,并给出的属性指标:、()。adfico基于、、、、、,经过dfil、gcbas、cmbim的处理,实现对定子电阻辨识值、定子电感辨识值、反电动势系数辨识值的离线辨识。
[0035]
为了更为具体地描述本发明,下面对本发明的技术方案及其相关工作原理进行详细说明。
[0036]
搭建了电动三轮车电机实验平台,主控芯片采用stm32f407zgt6,pwm频率设为20 khz,用磁滞测功机给电机加载,电动三轮车电机的具体参数如表1所示。
[0037]
表1电动三轮车电机参数
ma,存在早熟收敛的情况,而adfico收敛曲线在三者中的幅值最低,收敛精度最高。图10与图11的两种情况中,adfico同样有着最快的前期收敛速度与最高的后期收敛精度。
[0042]
为了定量评估每种方法的辨识性能,给出最终适应度的平均值(mean.)、最终适应度的标准差(std.)、首次求出全局最优解的平均迭代次数(iter.)以及能求出全局最优解的概率(pro.)四种性能评价指标如表4所示。在三种工况下,adfico均取得了最小的mean.、std.与iter.,表明其有着最高的局部搜索能力、鲁棒性与收敛速度。此外,adfico的全局搜索性能要优于pso与woa,因为其在三种情况中取得的pro.均高达100%;在=0.38、=2.7 n
·
m的工况下,adfico有着更为明显的全局搜索优势,其取得的pro.与pso、woa相比分别增加了99%和7%。
[0043]
表4 参数辨识中不同方法的性能指标值在实验中,定义参数误差errm用于衡量参数辨识的准确度,其公式为:(19)其中,、、分别为、与的实际值,越小表示参数辨识的准确度越高。
[0044]
这里给出三种方法在三种工况下的最优参数辨识结果如表5所示。
[0045]
表5 不同方法的最优参数辨识结果其中,adfico在=0.30、=1.9 n
·
m时求得的为12.7186 ma,对应的参数误差为2.11%,分别低至pso与woa的18.94%与23.65%。在=0.34、=2.3 n
·
m与=0.38、=2.7 n
·
m两种情况下,adfico求得的分别为12.4925 ma与48.4189 ma,对应的
参数误差分别为1.25%与1.27%,均为三种方法中的最小值,表明adfico在三种方法中的参数辨识准确度最高。
[0046]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1