一种基于内模与扩张状态观测器的火箭舵机系统控制方法与流程
1.本发明涉及火箭电动舵机控制领域,具体涉及一种基于内模与扩张状态观测器的火箭舵机系统控制方法。
背景技术:
2.火箭舵机系统是一个经典的位置伺服系统,系统通过控制舵机的转动角度操纵舵面的偏转,从而实现火箭箭体的姿态控制。与液压舵机相比,电动舵机因其结构简单,体积小,可靠性高,在航空航天领域得到了越来越广泛的应用。永磁同步电机作为目前十分流行的交流电机,具有响应速度快,效率高,转矩惯性比大等优点,正逐步成为电动舵机系统的主流电机并在高性能位置伺服系统中得到了广泛的应用。pid控制作为一种经典的线性控制方法,被广泛的应用到永磁同步电动舵机的控制中。但是永磁同步电动舵机不仅是一个多输入多输出的非线性系统,而且容易受到负载转矩干扰和参数变化的影响。这时,pid控制便很难取得令人满意的控制性能,即在实际运行过程中存在干扰和参数摄动影响舵机位置控制性能的问题。
技术实现要素:
3.为了克服目前舵机系统控制技术中存在的不足,本发明提供一种基于内模与扩张状态观测器的火箭舵机系统控制方法。
4.为实现上述发明目的,本发明采用以下技术方案:一种基于内模与扩张状态观测器的火箭舵机系统控制方法,包括以下步骤:
5.s1、使用永磁同步电机作为火箭舵机系统的驱动电机,在两相旋转(dq)坐标系下建立永磁同步电动舵机的数学模型;
6.s2、针对电动舵机的位置环与速度环设计基于内模的状态反馈控制器;
7.s21、假设即舵控信号和干扰信号由一个外部系统产生;
8.s22、写出电动舵机数学模型的位置与速度方程
9.s23、求解出外部系统矩阵的最小多项式,构造内模;
10.s24、联立电动舵机数学模型的位置与速度方程和内模,得到增广系统;
11.s25、设计基于内模的状态反馈控制器;
12.s3、针对电动舵机的电流环设计扩张状态观测器,并得到最终控制器:
13.s31、写电流环方程;
14.s32、设计扩张状态观测器观测未知动态;
15.s33、设计iq电流环控制器和id电流环控制器。
16.进一步地,所述步骤s1中,两相旋转(dq)坐标系下驱动电机的数学建模如下:
17.[0018][0019][0020][0021]
其中θr为舵机转子位置,ωr为舵机转速,ud为d轴电压,uq为q轴电压,id为d轴电流,iq为q轴电流,l为定子电感,t
l
为负载转矩,rs为定子电阻,j为转动惯量,b为粘滞摩擦系数,φv为永磁体磁链,p为电机的极对数,电磁转矩te=1.5pφv;
[0022]
进一步地,所述步骤s2中,假设舵控信号θd是一个频率为w的正弦信号,负载转矩干扰t
l
是一个常值信号,它们均可由如下的外部系统产生:
[0023][0024]
其中v=[v
1 v
2 v3]
t
为外部系统变量,a1为外部系统矩阵,为v的导数;
[0025]
令x1=θr,x2=ωr,定子电流iq可作为q轴电流环的参考信号同时也是位置环与速度环的控制输入,则电动舵机数学模型的位置与速度方程可写为如下形式:
[0026][0027]
其中x=(x
1 x2)
t
,,为x的导数;
[0028]
求解外部系统矩阵a1的最小多项式为λ3+w2λ,则构造出如下形式的内模:
[0029][0030]
其中η为内模变量,为η的导数,e=θ
r-v1为舵机位置跟踪误差;
[0031]
令xa=col(x,η),联立电动舵机数学模型的位置与速度方程和内模,则得到如下形式的增广系统:
[0032]
[0033]
其中其中为的导数;
[0034]
设计基于内模的状态反馈控制器为如下形式:
[0035][0036][0037]
其中k为需要设计的定常矩阵。
[0038]
进一步地,所述步骤s3中,将iq电流环方程写为如下形式:
[0039][0040]
其中
[0041]
进一步地,所述步骤s3中,所述扩张状态观测器形式如下:
[0042][0043][0044]
其中γ1,γ2分别为iq,aq(t)的估计值,分别为γ1,γ2的导数,p0为正常数。
[0045]
进一步地,所述步骤s3中,其特征在于,iq电流环控制器设计如下:
[0046][0047]
其中k1为正常数。
[0048]
进一步地,所述id电流环采用pi控制器,设计如下:
[0049][0050]
其中k
p1
与k
i1
分别为比例增益与积分增益。
[0051]
进一步地,所述定常矩阵k的设计方法为,通过配置极点,使aa+bak的所有特征值均位于负实部。
[0052]
进一步地,所述外部系统矩阵a1的最小多项式根据|λe-a1|=0求解,e为单位矩阵。
[0053]
本发明还提供一种火箭舵机系统,该系统使用了上述的基于内模与扩张状态观测器的火箭舵机系统控制方法。
[0054]
与现有技术相比,本发明提供了一种基于内模与扩张状态观测器的火箭舵机系统控制方法,提出的内模控制方法是一个全局的控制方法,不需要对控制信号与干扰信号的大小进行假设,该方法增强了位置环与速度环的稳态性能,并且提高了舵机系统的鲁棒性;
同时针对电流环设计了扩张状态观测器用来观测电流环的总扰动,该方法增强了电流环的抗扰动能力,提升了舵机系统的动态性能。
[0055]
总的来说,本发明不仅通过改善位置环与速度环使得舵机系统具有高精度的稳态跟踪性能,同时通过改善电流环使得舵机系统也具有良好的动态响应性能,解决了火箭实际运行过程中负载转矩干扰和参数摄动影响舵机位置跟踪性能的问题。
附图说明
[0056]
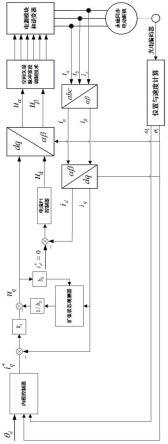
图1为本发明永磁同步电动舵机控制框图;
[0057]
图2为本发明实施例仿真所得舵反馈响应曲线;
[0058]
图3为本发明实施例仿真所得舵反馈跟踪误差曲线;
[0059]
图4为本发明实施例仿真所得电磁转矩曲线。
具体实施方式
[0060]
下面结合附图对本发明做更进一步的说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0061]
本发明的一种基于内模与扩张状态观测器的火箭舵机系统控制方法,该方法包含以下步骤:
[0062]
s1、使用永磁同步电机作为火箭舵机系统的驱动电机,在两相旋转(dq)坐标系下建立永磁同步电动舵机的数学模型;
[0063]
s2、针对电动舵机的位置环与速度环设计基于内模的状态反馈控制器;
[0064]
s3、针对电动舵机的电流环设计扩张状态观测器用于观测未知动态,并得到最终控制器。
[0065]
步骤s1具体为:
[0066]
选择永磁同步电机作为火箭舵机系统的驱动电机,在两相旋转(dq)坐标系下进行数学建模,其形式如下:
[0067][0068][0069][0070][0071]
其中θr为舵机转子位置,也称舵反馈信号,ωr为舵机转速,ud为d轴电压,uq为q轴电压,id为d轴电流,iq为q轴电流,l为定子电感,t
l
为负载转矩,rs为定子电阻,j为转动惯量,b为粘滞摩擦系数,φv为永磁体磁链,p为电机的极对数,电磁转矩te=1.5pφv。
[0072]
步骤s2具体为:
[0073]
s21、假设舵控信号θd是一个频率为w的正弦信号,负载转矩干扰t
l
是一个常值信
号,它们均可由如下的外部系统产生:
[0074][0075]
其中v=[v
1 v
2 v3]
t
为外部系统变量,a1为外部系统矩阵,为v的导数;
[0076]
由公式(2)可以推导得出由公式(2)可以推导得出为v2的导数;
[0077]
s22、令x1=θr,x2=ωr,定子电流iq可作为q轴电流环的参考信号同时也是位置环与速度环的控制输入,则电动舵机数学模型的位置与速度方程可写为如下形式:
[0078][0079]
其中其中为的导数;
[0080]
s23、求解外部系统矩阵a1的最小多项式为λ3+w2λ,则可构造如下形式的内模:
[0081][0082]
其中η为内模变量,为η的导数,e=θ
r-v1为舵机位置跟踪误差;
[0083]
s24、令xa=col(x,η)并联立系统(3)与内模(4)可得到一个增广系统,其形式如下:
[0084][0085]
其中其中为xa的导数;
[0086]
s25、设计基于内模的状态反馈控制器为如下形式:
[0087][0088]
其中k为需要设计的定常矩阵,通过配置极点,可使aa+bak的所有特征值均位于负实部。
[0089]
步骤3具体为:
[0090]
s31、将iq电流环方程写为如下形式:
[0091][0092]
其中其中为iq的二阶导数。
[0093]
s32、设计扩张状态观测器用于观测未知动态,形式如下:
[0094][0095][0096]
其中γ1,γ2分别为iq,aq(t)的估计值,分别为γ1,γ2的导数,p0为正常数;
[0097]
s33、设计iq电流环控制器和id电流环控制器;
[0098]iq
电流环控制器设计如下:
[0099][0100]
其中k1为正常数;
[0101]
id电流环采用pi控制器,形式如下:
[0102][0103]
其中k
p1
与k
i1
分别为比例增益与积分增益;
[0104]
结合(6)(8)(9)(10)得到最终控制器,形式如下:
[0105][0106]
为了验证所提方法的有效性,现提供本发明的一个实施例:
[0107]
所选用的永磁同步电动舵机的标称值为:
[0108]
p=2,考虑到火箭运行过程中电动舵机会存在参数摄动的现象,因此不确定的电机参数选择如下:
[0109]
舵控信号θd=30
°
sin(3t),负载转矩干扰t
l
=1n.m控制器参数选择如下:
[0110]
k=[-252-1-5.5-5.4-1.8],k1=20,p0=200,k
p1
=3,k
i1
=1
[0111]
采用上述的一系列参数,应用本发明方法控制舵机伺服系统,永磁同步电动舵机控制框图如图1所示,采用matlab平台对系统进行仿真验证,得到如图2-4所示的仿真结果。图2为舵反馈θr响应曲线,图3位舵反馈跟踪误差曲线,图4电磁转矩te曲线,仿真结果表明该控制方法在参数摄动以及外部干扰的条件下具有精确的稳态跟踪性能,验证了本发明的实际可行性。
[0112]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1