电流控制方法、电流控制系统、臂架控制系统和车辆与流程
1.本发明涉及工程机械领域,具体而言,涉及一种电流控制方法、电流控制系统、臂架控制系统和车辆。
背景技术:
2.目前,混凝土泵车臂架旋转电流控制大多采用定值控制方法,即下达臂架旋转指令后直接将臂架旋转电流设置为目标值,部分发明中对控制电流进行了简单的非连续的渐变处理和反馈控制来减少臂架回转的冲击。然而现有技术中的控制方法在臂架旋转启动过程中,控制臂架旋转的电流非连续的变化,导致臂架旋转的忽快忽慢;启动完成后臂架末端摆动幅度大。
3.因此,如何提出一种基于电流变化率对臂架旋转电流进行控制,以使得控制臂架旋转的电流能够连续变化的方案成为目前亟待解决的问题。
技术实现要素:
4.为解决上述技术问题,本发明的第一方面提出了一种电流控制方法。
5.本发明的第二方面还提出了一种电流控制系统。
6.本发明的第三方面还提出了一种臂架控制系统。
7.本发明的第四方面还提出了一种车辆。
8.本发明的第五方面还提出了一种可读存储介质。
9.有鉴于此,本发明第一方面提出了一种电流控制方法,用于车辆臂架控制系统,电流控制方法包括:获取控制臂架旋转的实际电流值;获取目标电流值;计算实际电流值与目标电流值的差值绝对值;当差值绝对值大于第一预设阈值时,以预设电流变化率时间曲线将实际电流值调节成目标电流值。
10.根据本发明提供的电流控制方法,用于车辆臂架控制系统。该电流控制方法首先对控制泵车臂架旋转的实际电流值进行获取,进而获取臂架旋转手柄控制臂架旋转的目标电流值,进而根据实际电流值和目标电流值计算出二者之间的差值绝对值,以确定目标电流值的变化幅度;对计算出的差值绝对值与预设的第一预设阈值进行比较,当该差值绝对值大于第一预设阈值的时候,按照预设的电流变化率时间曲线对电流进行控制,使其从实际电流值调节至目标电流值,其中,预设电流变化率时间曲线为一阶连续的,按照预设电流变化率时间曲线对电流进行控制,能够使得电流连续性变化,以此使得电流变化过程是平滑的,电流的平滑变化能够使得臂架旋转过程更加平稳,以此大幅降低臂架旋转时,臂架末端线速度跟随时的超调及调整时间,消除臂架末端在旋转启动和刹车时的柔性冲击;当该差值绝对值小于等于第一预设阈值时,则无需按照上述曲线对电流进行控制。本技术通过对目标电流值的变化幅度进行确定,当变化幅度过大时,按照预设的电流变化率时间曲线对电流的变化进行控制,使得臂架旋转时启动能够平稳,到达目标速度后能够保持稳定,避免了臂架移动忽快忽慢,保证了臂架的线速度实时跟随,通过控制电流按照预设曲线进行
变化解决臂架启动和停止过程的冲击和震荡的问题。
11.另外,本发明提供的上述技术方案中的电流控制方法还可以具有如下附加技术特征:
12.在上述技术方案中,实际电流值调节成目标电流值的变化过程为一阶连续变化。
13.在该技术方案中,通过控制实际电流值一阶连续变化为目标电流值,使得电流值变化的过程平稳顺滑,避免了臂架旋转时忽快忽慢,大幅度降低了臂架末端线速度跟随时超调及调整时间,消除臂架末端在横摆上的柔性冲击,保证了臂架的线速度实时跟随。
14.其中,实际电流值调节成目标电流值的变化过程为一阶连续变化,具体是指,电流值的变化曲线经过求导后的一阶导数图像,即预设电流变化率时间曲线的图像为一条连续的线。
15.在上述技术方案中,当差值绝对值大于第一预设阈值时,以预设电流变化率时间曲线将实际电流值调节成目标电流值具体包括:当差值绝对值大于等于第二预设阈值时,控制实际电流值变化为目标电流值,其中,在控制所述实际电流值变化为所述目标电流值的过程中,最大电流变化率为系统极限变化率;当差值绝对值小于第二预设阈值时,控制实际电流值变化为目标电流值,其中,在控制所述实际电流值变化为所述目标电流值的过程中,最大电流变化率小于系统极限变化率。
16.在该技术方案中,当实际电流值与目标电流值之间的差值绝对值大于预设第一阈值时,确定按照预设电流变化率时间变化曲线对电流进行变化控制,此时要进而对差值绝对值进行进一步判断,判断差值绝对值与第二预设差值之间的大小关系,当差值绝对值大于等于第二预设阈值时,在对电流的变化进行控制的过程中,电流的变化率最大可以达到系统极限变化率,当差值绝对值小于第二预设阈值时,在对电流的变化进行控制的过程中,电流的变化率最大值小于系统极限变化率,以此实现电流变化过程控制的更加合理化,使得电流变化的过程更加的平稳顺滑。
17.其中,为避免最大电流变化率与系统极限变化率混淆,在此对最大电流变化率进行解释:最大电流变化率为在电流变化的过程中,电流变化率所达到峰值。由于当差值绝对值小于第二预设阈值时,无需在电流变化时达到系统极限,因此当差值绝对值小于第二预设阈值时利用小于系统极限的最大电流变化率有利于延长设备寿命。第一预设阈值小于第二预设阈值。
18.在上述技术方案中,当差值绝对值大于等于第二预设阈值时,控制实际电流值变化为目标电流值具体包括:控制实际电流值达到第一电流,在实际电流值达到第一电流的过程中,电流值的变化率从第一变化率增大到第二变化率;控制第一电流以第二变化率增大到第二电流;控制第二电流增大到目标电流值,在第二电流增大到目标电流值的过程中,电流的变化率由第二变化率减小到第一变化率;其中,第一变化率为初始变化率,第二变化率为系统极限变化率。
19.在该技术方案中,当差值绝对值大于等于第二预设阈值时,首先控制实际电流值增大到第一电流,并且增大过程的电流变化率由初始变化率增大到系统极限变化率。进而控制第一电流增大到第二电流,并且增大过程的电流变化保持为第二变化率。进而控制第二电流增大到目标电流值,并且增大过程的电流变化率由系统极限变化率减小为初始变化率。通过控制电流先加速增长、再平稳增长、而后再减速增长,使得实际电流值变化为目标
电流值的过程平稳顺滑,避免了臂架旋转过程忽快忽慢而导致的臂架冲击和震荡,保证了臂架末端在旋转过程中的摆动幅度不会太大。
20.在上述任一技术方案中,在实际电流值达到第一电流的过程中,电流值的变化率以第一线性函数从第一变化率线性增大到第二变化率,第一线性函数的斜率为j。
21.在该技术方案中,实际电流值按照线性增长的变化率进行变化,以此达到了电流变化平稳的目的,进而使得臂架的启动过程平稳,不会由于忽快忽慢而造成的臂架末端大幅度晃动。
22.在上述任一技术方案中,第一电流v1,实际电流值v
实
,第一变化率a0,第一线性函数的斜率j、第一电流v1满足以下关系式:满足以下关系式:
23.在该技术方案中,第一电流的变化过程满足上述公式,以此使得臂架的启动过程平稳,规避了忽快忽慢的电流变化带来的臂架末端大幅晃动的问题,进而避免了臂架启动过程的冲击和震荡。
24.在上述任一技术方案中,控制第一电流以第二变化率增大到第二电流所需的时长为t,则:v2=v1+a
max
×
t;其中,v2为第二电流,t》0,第二变化率为a
max
。
25.在该技术方案中,第一电流按照系统极限变化率变化为第二电流,持续时长大于0,此阶段电流均匀增加,更加有益于电流的平稳变化,进一步保证了臂架末端的稳定性。
26.在上述任一技术方案中,在第二电流增大到目标电流值的过程中,电流的变化率由第二变化率以第二线性函数减小到第一变化率,第二线性函数的斜率为k;其中:其中,v
目标
为目标电流值,v2为第二电流。
27.其中,第一线性函数的斜率绝对值和第二线性函数的斜率绝对值可以是相同的数值也可以是不同的数值。
28.在该技术方案中,在第二电流变化为目标电流值这一过程,采用匀减的变化率,使得第二电流快达到目标电流值时的变化率越来越小,使得臂架旋转的停止过程是平稳的,不会由于突然的停止加速而造成臂架的震荡,使得臂架末端能够按照线性变化的加速度实现实时跟随旋转,保证了臂架旋转的停止过程的稳定性。
29.在上述任一技术方案中,其中,j为第一线性函数的斜率,γ为第二预设阈值、a0为第一变化率,a
max
为第二变化率。
30.在该技术方案中,第二预设阈值的设定满足上述公式,当实际电流值的变化幅度大于等于上述公式的结果是采用第一形式进行电流控制,当实际电流值的变化幅度小于上述公式的结果时,采用第二形式进行电流控制。使得电流控制的方式更加合理,在电流变化不大时就无需让系统电流的变化率达到系统极限,在整个控制过程在平稳的基础上,也是对器械的一种保护,避免器械始终工作在极限值,有利于延长器械的使用寿命。
31.在上述任一技术方案中,当差值绝对值小于第二预设阈值时,控制实际电流值变化为目标电流值具体包括:控制实际电流值达到第三电流,在实际电流值达到第三电流的过程中,电流值的变化率从第一变化率增大到第三变化率;控制第三电流增大到目标电流值,在第三电流增大到目标电流值的过程中,电流的变化率由第三变化率减小到第一变化
率;其中,第一变化率为初始变化率,第三变化率小于系统极限变化率。
32.其中,第一形式中的第一变化率与第二形式中的第一变化率可以为相同的,也可以为不同的。
33.在该技术方案中,当差值绝对值小于第二预设阈值时,实际电流值增大到第三电流的过程,采用的电流变化率从初始变化率线性增加到一个小于系统极限变化率的第三变化率,因为此时的电流变化不大,无需通过达到系统极限来实现电流的变化,有利于延长器械的使用寿命;进而从第三电流变化为目标电流值,此时采用的电流变化率为从第三变化率线性减少到初始变化率。通过上述变化使得在电流变化幅度不大的时候,可以在无需达到系统极限的情况下,完成电流从初始值变化为目标值,整个变化过程顺滑平稳,保证了臂架末端不会因旋转速度的变化忽快忽慢而震荡和冲击,使得臂架末端能够线速度实时跟随旋转。
34.在上述任一技术方案中,电流值的变化率从第一变化率线性增大到第三变化率,电流值的变化率从第三变化率线性减小到第一变化率。
35.在该技术方案中,实际电流值按照线性增长和减小的变化率进行变化,以此达到了电流变化平稳的目的,进而使得臂架的启动过程平稳,不会由于忽快忽慢而造成的臂架末端大幅度晃动。
36.本发明的第二方面提供了一种电流控制系统,包括:存储器、处理器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现上述任一技术方案的电流控制方法的步骤。
37.根据本发明的技术方案提供的电流控制系统,包括存储器和处理器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现上述任一电流控制方法限定的步骤。同时,由于本技术的电流控制系统能够实现上述任一电流控制方法限定的步骤,因此本技术方案提供的电流控制系统具有上述任一实施例中提供的电流控制方法的全部有益效果。
38.本发明的第三方面提供了一种臂架控制系统,包括:如上述技术方案中的电流控制系统。
39.根据本发明的技术方案提供的臂架控制系统,由于其包括上述技术方案中的电流控制系统,因而该臂架控制系统具备该电流控制系统的全部技术效果,在此不再赘述。
40.本发明的第四方面提供了一种车辆,包括:如上述技术方案中的电流控制系统;或如上述技术方案中的臂架控制系统。
41.根据本发明的技术方案提供的车辆,由于其包括上述技术方案中的电流控制系统或臂架控制系统,因而该车辆具备该电流控制系统和臂架控制系统的全部技术效果,在此不再赘述。
42.本发明的第五方面提供了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现上述任一技术方案中的电流控制方法的步骤。
43.在该技术方案中,可读存储介质上存储的程序或指令被处理器执行时可实现上述任一技术方案中的电流控制方法的步骤,因而具有上述电流控制方法的全部有益技术效果,在此不再赘述。
44.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践
了解到。
附图说明
45.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
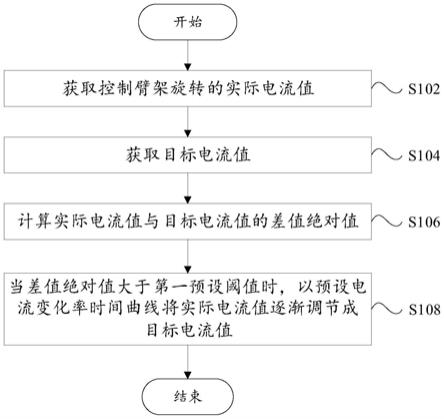
46.图1示出了本发明的一个实施例的电流控制方法的流程示意图;
47.图2示出了图1中s110的具体步骤示意图;
48.图3示出了本发明电流控制方法的一种预设电流变化率时间曲线;
49.图4示出了本发明电流控制系统的方框图。
50.其中,图4中附图标记与部件名称之间的对应关系为:
51.400电流控制系统,402存储器,404处理器。
具体实施方式
52.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
53.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
54.下面参照图1至图4描述本发明一些实施例中的电流控制方法、电流控制系统、臂架控制系统和车辆。
55.本发明第一方面实施例提出了一种电流控制方法,用于车辆臂架控制系统,如图1所示,电流控制方法包括:
56.s102,获取控制臂架旋转的实际电流值;
57.s104,获取目标电流值;
58.s106,计算实际电流值与目标电流值的差值绝对值;
59.s108,当差值绝对值大于第一预设阈值时,以预设电流变化率时间曲线将实际电流值调节成目标电流值。
60.根据本实施例提供的电流控制方法,用于车辆臂架控制系统。该电流控制方法首先对控制泵车臂架旋转的实际电流值进行获取,进而获取臂架旋转手柄控制臂架旋转的目标电流值,进而根据实际电流值和目标电流值计算出二者之间的差值绝对值,以确定目标电流值的变化幅度;对计算出的差值绝对值与预设的第一预设阈值进行比较,当该差值绝对值大于第一预设阈值的时候,按照预设的电流变化率时间曲线对电流进行控制,使其从实际电流值调节至目标电流值,其中,预设电流变化率时间曲线为一阶连续的,按照预设电流变化率时间曲线对电流进行控制,能够使得电流连续性变化,以此使得电流变化过程是平滑的,电流的平滑变化能够使得臂架旋转过程更加平稳,以此大幅降低臂架旋转时,臂架末端线速度跟随时的超调及调整时间,消除臂架末端在旋转启动和刹车时的柔性冲击;当该差值绝对值小于等于第一预设阈值时,则无需按照上述曲线对电流进行控制。本技术通过对目标电流值的变化幅度进行确定,当变化幅度过大时,按照预设的电流变化率时间曲
线对电流的变化进行控制,使得臂架旋转时启动能够平稳,到达目标速度后能够保持稳定,避免了臂架移动忽快忽慢,保证了臂架的线速度实时跟随,通过控制电流按照预设曲线进行变化解决臂架启动和停止过程的冲击和震荡的问题。
61.在上述实施例中,实际电流值调节成目标电流值的变化过程为一阶连续变化。
62.在该实施例中,通过控制实际电流值一阶连续变化为目标电流值,使得电流值变化的过程平稳顺滑,避免了臂架旋转时忽快忽慢,大幅度降低了臂架末端线速度跟随时超调及调整时间,消除臂架末端在横摆上的柔性冲击,保证了臂架的线速度实时跟随。
63.其中,实际电流值调节成目标电流值的变化过程为一阶连续变化,具体是指,电流值的变化曲线经过求导后的一阶导数图像,即预设电流变化率时间曲线的图像为一条连续的线。
64.在上述实施例中,如图2所示,s108,当差值绝对值大于第一预设阈值时,以预设电流变化率时间曲线将实际电流值调节成目标电流值具体包括:
65.s1082,当差值绝对值大于等于第二预设阈值时,控制实际电流值变化为目标电流值,其中,在控制所述实际电流值变化为所述目标电流值的过程中,最大电流变化率为系统极限变化率;
66.s1084,当差值绝对值小于第二预设阈值时,控制实际电流值变化为目标电流值,其中,在控制所述实际电流值变化为所述目标电流值的过程中,最大电流变化率小于系统极限变化率。
67.在该实施例中,当实际电流值与目标电流值之间的差值绝对值大于预设第一阈值时,确定按照预设电流变化率时间变化曲线对电流进行变化控制,此时要进而对差值绝对值进行进一步判断,判断差值绝对值与第二预设差值之间的大小关系,当差值绝对值大于等于第二预设阈值时,在对电流的变化进行控制的过程中,电流的变化率最大达到系统极限变化率,当差值绝对值小于第二预设阈值时,在对电流的变化进行控制的过程中,电流的变化率最大值小于系统极限变化率,以此实现电流变化过程控制的更加合理化,使得电流变化的过程更加的平稳顺滑。
68.其中,当实际电流值变化为目标电流值的幅度过大时,要采用系统极限变化率进行电流控制,以加快电流变化的速度,当实际电流值变化为目标电流之的幅度不大、较小时,无需采用系统极限变化率来进行电流控制,只需要采用小于系统极限的变化率进行控制即可,这样处理有利于避免器械始终工作在极限状态,有利于延长器械的使用寿命。
69.其中,为避免最大电流变化率与系统极限变化率混淆,在此对最大电流变化率进行解释:最大电流变化率为在电流变化的过程中,电流变化率所达到峰值。由于当差值绝对值小于第二预设阈值时,无需在电流变化时达到系统极限,因此当差值绝对值小于第二预设阈值时利用小于系统极限的最大电流变化率有利于延长设备寿命。第一预设阈值小于第二预设阈值。
70.在上述实施例中,当差值绝对值大于等于第二预设阈值时,控制实际电流值变化为目标电流值具体包括:控制实际电流值达到第一电流,在实际电流值达到第一电流的过程中,电流值的变化率从第一变化率增大到第二变化率;控制第一电流以第二变化率增大到第二电流;控制第二电流增大到目标电流值,在第二电流增大到目标电流值的过程中,电流的变化率由第二变化率减小到第一变化率;其中,第一变化率为初始变化率,第二变化率
为系统极限变化率。
71.在该实施例中,当差值绝对值大于等于第二预设阈值时,首先控制实际电流值增大到第一电流,并且增大过程的电流变化率由初始变化率增大到系统极限变化率。进而控制第一电流增大到第二电流,并且增大过程的电流变化保持为第二变化率。进而控制第二电流增大到目标电流值,并且增大过程的电流变化率由系统极限变化率减小为初始变化率。通过控制电流加速增长、进而平稳增长、进而减速增长,使得实际电流值变化为目标电流值的过程平稳顺滑,避免了臂架旋转过程忽快忽慢而导致的臂架冲击和震荡,保证了臂架末端在旋转过程中的摆动幅度不会太大。
72.在上述任一实施例中,在实际电流值达到第一电流的过程中,电流值的变化率以第一线性函数从第一变化率线性增大到第二变化率,第一线性函数的斜率为j。
73.在该实施例中,实际电流值按照线性增长的变化率进行变化,以此达到了电流变化平稳的目的,进而使得臂架的启动过程平稳,不会由于忽快忽慢而造成的臂架末端大幅度晃动。
74.本实施例以变化率增长和减小的过程为线性变化为例,当然,本发明中的变化率在变化时也可以不采用线性变化的方式,如图3所示,本发明中的电流在进行变化时所采用的变化率也可以为按照上升s曲线进行变化率的增大,在维持平稳一段时间后,按照下降s曲线进行变化率的减小,整个初始电流值变化为目标电流值的过程所采用的电流变化率参照图3中的加加速、匀加速、减加速、匀速、加减速、匀减速、减减速,以此使得电流的变化过程始终是平稳的,进而保证的臂架末端的稳定移动。
75.在上述任一实施例中,第一电流v1,实际电流值v
实
,第一变化率a0,第一线性函数的斜率j、第一电流v1满足以下关系式:满足以下关系式:
76.在该实施例中,第一电流的变化过程满足上述公式,以此使得臂架的启动过程平稳,规避了忽快忽慢的电流变化带来的臂架末端大幅晃动的问题,进而避免了臂架启动过程的冲击和震荡。
77.在上述任一实施例中,控制第一电流以第二变化率增大到第二电流所需的时长为t,则:v2=v1+a
max
×
t;其中,v2为第二电流,t》0,第二变化率为a
max
。
78.在该实施例中,第一电流按照系统极限变化率变化为第二电流,持续时长大于0,此阶段电流均匀增加,更加有益与电流的平稳变化,进一步保证了臂架末端的稳定性。
79.在上述任一实施例中,在第二电流增大到目标电流值的过程中,电流的变化率由第二变化率以第二线性函数减小到第一变化率,第二线性函数的斜率为k;其中:其中,v
目标
为目标电流值,v2为第二电流。
80.其中,第一线性函数的斜率绝对值和第二线性函数的斜率绝对值可以是相同的数值也可以是不同的数值。
81.在该实施例中,在第二电流变化为目标电流值这一过程,采用匀减的变化率,使得第二电流快达到目标电流值时的变化率越来越小,使得臂架旋转的停止过程是平稳的,不会由于突然的停止加速而造成臂架的震荡,使得臂架末端能够按照线性变化的加速度实现实时跟随旋转,保证了臂架旋转的停止过程的稳定性。
82.在上述任一实施例中,其中,j为第一线性函数的斜率,γ为第二预设阈值、a0为第一变化率,a
max
为第二变化率。
83.在该实施例中,第二预设阈值的设定满足上述公式,当实际电流值的变化幅度大于等于上述公式的结果是采用第一形式进行电流控制,当实际电流值的变化幅度小于上述公式的结果时,采用第二形式进行电流控制。使得电流控制的方式更加合理,在电流变化不大时就无需让系统电流的变化率达到系统极限,在整个控制过程在平稳的基础上,也是对器械的一种保护,避免器械始终工作在极限值,有利于延长器械的使用寿命。
84.在上述任一实施例中,当差值绝对值小于第二预设阈值时,控制实际电流值变化为目标电流值具体包括:控制实际电流值达到第三电流,在实际电流值达到第三电流的过程中,电流值的变化率从第一变化率增大到第三变化率;控制第三电流增大到目标电流值,在第三电流增大到目标电流值的过程中,电流的变化率由第三变化率减小到第一变化率;其中,第一变化率为初始变化率,第三变化率小于系统极限变化率。
85.其中,第一形式中的第一变化率与第二形式中的第一变化率可以为相同的,也可以为不同的。
86.在该实施例中,当差值绝对值小于第二预设阈值时,实际电流值增大到第三电流的过程,采用的电流变化率从初始变化率线性增加到一个小于系统极限变化率的第三变化率,因为此时的电流变化不大,无需通过达到系统极限来实现电流的变化,有利于延长器械的使用寿命;进而从第三电流变化为目标电流值,此时采用的电流变化率为从第三变化率线性减少到初始变化率。通过上述变化使得在电流变化幅度不大的时候,可以在无需达到系统极限的情况下,完成电流从初始值变化为目标值,整个变化过程顺滑平稳,保证了臂架末端不会因旋转速度的变化忽快忽慢而震荡和冲击,使得臂架末端能够线速度实时跟随旋转。
87.在上述任一实施例中,控制实际电流值v
实
达到第三电流v3,在实际电流值达到第三电流的过程中,电流值的变化率从第一变化率a1增大到第三变化率a3的公式为:
88.在该实施例中,第一电流的变化过程满足上述公式,以此使得臂架的启动过程平稳,规避了忽快忽慢的电流变化带来的臂架末端大幅晃动的问题,进而避免了臂架启动过程的冲击和震荡。
89.在上述任一实施例中,控制所述第三电流增大到所述目标电流值v
目标
,在所述第三电流增大到所述目标电流值的过程中,所述电流的变化率由所述第三变化率减小到所述第一变化率的公式为:
90.在该实施例中,在第三电流变化为目标电流值这一过程,采用匀减的变化率,使得第三电流快达到目标电流值时的变化率越来越小,使得臂架旋转的停止过程是平稳的,不会由于突然的停止加速而造成臂架的震荡,使得臂架末端能够按照线性变化的加速度实现实时跟随旋转,保证了臂架旋转的停止过程的稳定性。
91.在上述任一实施例中,电流值的变化率从第一变化率线性增大到第三变化率,电
流值的变化率从第三变化率线性减小到第一变化率。
92.在该实施例中,实际电流值按照线性增长和减小的变化率进行变化,以此达到了电流变化平稳的目的,进而使得臂架的启动过程平稳,不会由于忽快忽慢而造成的臂架末端大幅度晃动。
93.本发明的电流控制方法不仅可用于在电流增大过程中进行控制,也可用于在电流减小的过程进行控制,具体步骤与上述增大过程同理,在此不再赘述。
94.本发明的第二方面实施例提供了一种电流控制系统,如图4所示,包括:存储器、处理器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现上述任一实施例的电流控制方法的步骤。
95.根据本发明的实施例提供的电流控制系统400,包括存储器402和处理器404及存储在存储器402上并可在处理器404上运行的程序,程序被处理器404执行时实现上述任一电流控制方法限定的步骤。同时,由于本技术的电流控制系统能够实现上述任一电流控制方法限定的步骤,因此本实施例提供的电流控制系统具有上述任一实施例中提供的电流控制方法的全部有益效果。
96.本发明的第三方面实施例提供了一种臂架控制系统,包括:如上述实施例中的电流控制系统。
97.根据本发明的实施例提供的臂架控制系统,由于其包括上述实施例中的电流控制系统,因而该臂架控制系统具备该电流控制系统的全部技术效果,在此不再赘述。
98.本发明的第四方面实施例提供了一种车辆,包括:如上述实施例中的电流控制系统;或如上述实施例中的臂架控制系统。
99.根据本发明的实施例提供的车辆,由于其包括上述实施例中的电流控制系统或臂架控制系统,因而该车辆具备该电流控制系统和臂架控制系统的全部技术效果,在此不再赘述。
100.本发明的第五方面实施例提供了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现上述任一实施例中的电流控制方法的步骤。
101.在该实施例中,可读存储介质上存储的程序或指令被处理器执行时可实现上述任一实施例中的电流控制方法的步骤,因而具有上述电流控制方法的全部有益技术效果,在此不再赘述。
102.在本说明书中,术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
103.在本说明书的描述中,术语“一个实施例”、“一些实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
104.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1