一种粘滑驱动式压电直线驱动器
1.本发明属于压电驱动器领域,具体涉及一种粘滑驱动式压电直线驱动器。
背景技术:
2.随着信息技术、微纳米技术的迅速发展,在精密与超精密加工、微/纳米机械测试、扫描显微镜、航空航天工程等众多领域对微纳驱动技术的需求日益剧增。以压电材料的逆压电效应为驱动原理所制作的压电驱动器具有高响应、结构灵活、分辨率高、无磁性等优点,可以适用于绝大部分的应用环境,在微纳驱动技术中已经逐渐占据了主导地位。按照驱动原理的不同,压精密驱动器可分为超声谐振式、惯性式、尺蠖式。与其他驱动器相比较,压电粘滑驱动器具有能耗低、结构紧凑、分辨率高的优点,但也存在位移回退、定位精度低、承载能力差以及不可主动调控驱动过程中定子与动子间的摩擦力等问题,限制了其在微纳米操作系统以及定位系统中的应用。
3.压电粘滑驱动主要采用非对称电信号对压电元件进行激励,利用逆压电效应激发定子产生缓慢与快速交替的运动变形,使得定子与动子处于“粘”和“滑”两种运动状态,在摩擦力作用下实现机械运动输出。
技术实现要素:
4.本发明所要解决的技术问题是针对上述现有技术的现状,而提供驱动器的负载能力大、有效改善粘滑驱动器位移回退现象的一种粘滑驱动式压电直线驱动器。
5.本发明解决上述技术问题所采用的技术方案为:一种粘滑驱动式压电直线驱动器,包括基座和水平设置的动平台,基座设有供动平台滑动的导轨,动平台的下方设有第一连杆,第一连杆包括位于低位的第一端部,以及位于高位的第二端部;第二端部上固定设有陶瓷摩擦片,陶瓷摩擦片顶在动平台的下方;第一端部顶设有压电执行器驱动组;第一端部的下方顺次连有第一铰链、第二连杆、第二铰链和第一刚性块,第一刚性块螺固于基座。
6.为优化上述技术方案,采取的措施还包括:第二端部下方顺次连有第三铰链、第三连杆、第四铰链和第二刚性块;第一刚性块和第二刚性块之间连有一对第一柔性薄板;第二刚性块在位于第一刚性块相反的一侧设有第三刚性块,第三刚性块螺钉固定于基座,第二刚性块和第三刚性块之间连有一对第二柔性薄板;第四铰链位于第二铰链的高位,即第四铰链错开位于第二铰链所在水平面的偏上方位置,利于第一连杆复位时,陶瓷摩擦片能轻微下沉。
7.优选的方案中,基座上设有从下方顶在第二刚性块上的摩擦力调节螺栓,通过旋转调节螺栓能够调整陶瓷摩擦片对动平台的压力。
8.优选的方案中,第三连杆位于第二连杆的高位;第三铰链位于第一铰链的高位,利
于第一连杆复位时,陶瓷摩擦片能轻微下沉。
9.优选的方案中,陶瓷摩擦片的上表面为顶在动平台下方的平面;第三铰链、第三连杆和第四铰链之间的连线倾斜倒向压电执行器驱动组的方向;第一铰链、第二连杆和第二铰链之间的连线倾斜倒向压电执行器驱动组的方向。。
10.优选的方案中,基座包括朝向动平台的底部方向开口的容纳槽,陶瓷摩擦片、第一连杆、第一铰链、第二连杆、第二铰链、第一刚性块、第三铰链、第三连杆、第四铰链、第二刚性块、第一柔性薄板、第二柔性薄板和压电执行器驱动组皆位于容纳槽内。
11.优选的方案中,压电执行器驱动组包括串联的第一压电执行器和第二压电执行器,第二压电执行器夹设于第一压电执行器和第一端部之间;第一压电执行器靠近基座的一端贴设有垫片,基座上设有顶在垫片上的预紧力调节螺钉。第一压电执行器和第二压电执行器能够同时或交替使用,在交替使用时,其中一个压电执行器提供大行程步进式位移,然后另一个压电执行器提供缓慢精准的矫正位移。
12.优选的方案中,第二压电执行器的尺寸短于第一压电执行器。第二压电执行器提供大行程步进式位移,第一压电执行器提供缓慢精准的矫正位移。
13.优选的方案中,第一压电执行器和第二压电执行器分别平行于动平台。
14.优选的方案中,第二压电执行器固定于第一端部;第二压电执行器固定连接于第一压电执行器。这样第一连杆在复位时,除了利用自身弹性形变力复位外,还通过2个压电执行器的复位力快速复位。
15.在优选的方案中,第三铰链、第三连杆、第四铰链、第一连杆、第一铰链、第二连杆、第二铰链、第一柔性薄板组成的平行四连杆结构使陶瓷摩擦片的线性移动表现更强,并且移动更加稳定。
16.与现有技术相比,本发明的一种粘滑驱动式压电直线驱动器,包括基座和水平设置的动平台,基座设有供动平台滑动的导轨,动平台的下方设有第一连杆,第一连杆包括位于低位的第一端部,以及位于高位的第二端部;第二端部上固定设有陶瓷摩擦片,陶瓷摩擦片顶在动平台的下方;第一端部顶设有压电执行器驱动组;第一端部的下方顺次连有第一铰链、第二连杆、第二铰链和第一刚性块,第一刚性块螺固于基座。通电伸长的压电执行器驱动组能推动第一连杆,继而通过陶瓷摩擦片带动动平台向前移动,当压电执行器驱动组断电后,第一连杆快速复位,由于惯性,动平台保持不动,在第一连杆复位的过程中,由于第一连杆是倾斜的,所以陶瓷摩擦片会从动平台的下表面略微撤离,使复位的过程中,陶瓷摩擦片对动平台的摩檫力骤减,从而有效避免了在第一连杆快复位的过程中动平台的位移回退。本发明负载能力大、能有效改善粘滑驱动器位移回退现象。
附图说明
17.图1是本发明实施例一的俯视结构示意图;图2是图1中a-a剖面结构示意图;图3是本发明的立体结构示意图;图4是图3内部结构示意图;图5是图4的分解示意图;图6是本发明第三铰链、第三连杆、第四铰链、第一连杆、第一铰链、第二连杆、第二
铰链、第一柔性薄板、第二柔性薄板的结构示意图;图7是第三铰链、第三连杆、第四铰链、第一连杆、第一铰链、第二连杆、第二铰链、第一柔性薄板所组成的平行四连杆机构运动原理图;图8是实施例二的内部结构示意图;图9是动平台移动时第二压电执行器的工作时序图。
具体实施方式
18.以下结合附图对本发明的实施例作进一步详细描述。
19.图1至图8为本发明的结构示意图。
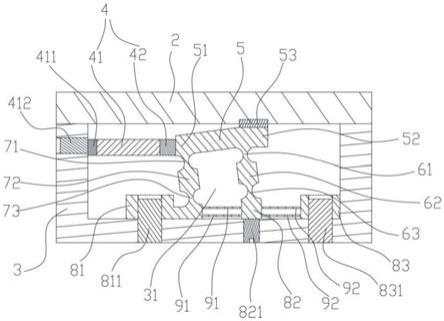
20.其中的附图标记为:导轨1、动平台2、基座3、容纳槽31、压电执行器驱动组4、第一压电执行器41、第二压电执行器42、垫片411、预紧力调节螺钉412、第一连杆5、第一端部51、第二端部52、陶瓷摩擦片53、第三铰链61、第三连杆62、第四铰链63、第一铰链71、第二连杆72、第二铰链73、第一刚性块81、第一固定螺钉811、第二刚性块82、摩擦力调节螺栓821、第三刚性块83、第二固定螺钉831、第一柔性薄板91、第二柔性薄板92。
21.图1至图7为本发明实施例一的结构示意图,如图所示,本发明的一种粘滑驱动式压电直线驱动器,包括基座3和水平设置的动平台2,基座3设有供动平台2滑动的导轨1,动平台2的下方设有第一连杆5,第一连杆5包括位于低位的第一端部51,以及位于高位的第二端部52;第二端部52上固定设有陶瓷摩擦片53,陶瓷摩擦片53顶在动平台2的下方;第一端部51顶设有压电执行器驱动组4;第一端部51的下方顺次连有第一铰链71、第二连杆72、第二铰链73和第一刚性块81,第一刚性块81通过第一固定螺钉811螺固于基座3。
22.实施例中,如图2、4、5所示,第二端部52下方顺次连有第三铰链61、第三连杆62、第四铰链63和第二刚性块82;第一刚性块81和第二刚性块82之间连有一对第一柔性薄板91;第二刚性块82在位于第一刚性块81相反的一侧设有第三刚性块83,第三刚性块83通过第二固定螺钉831固定于基座3,第二刚性块82和第三刚性块83之间连有一对第二柔性薄板92;第四铰链63位于第二铰链73的高位。
23.实施例中,如图2、4、5所示,基座3上设有从下方顶在第二刚性块82上的摩擦力调节螺栓821。拧动基座3底部的摩擦力调节螺钉821,可以使得柔性铰链机构的底部双平行板发生变形,粘在由第一连杆5所在的柔性铰链机构上的陶瓷摩擦片53会向上移动一定距离,进而改变导轨1与柔性铰链机构之间的正压力,从而起到调节摩擦力的作用。
24.实施例中,如图2、4、5和图6所示,第三连杆62位于第二连杆72的高位;第三铰链61位于第一铰链71的高位。
25.实施例中,如图2、4、5和图6所示,陶瓷摩擦片53的上表面为顶在动平台2下方的平面;第三铰链61、第三连杆62和第四铰链63之间的连线倾斜倒向压电执行器驱动组4的方向;第一铰链71、第二连杆72和第二铰链73之间的连线倾斜倒向压电执行器驱动组4的方向。
26.实施例中,如图2、4、5所示,基座3包括朝向动平台2的底部方向开口的容纳槽31,陶瓷摩擦片53、第一连杆5、第一铰链71、第二连杆72、第二铰链73、第一刚性块81、第三铰链61、第三连杆62、第四铰链63、第二刚性块82、第一柔性薄板91、第二柔性薄板92和压电执行器驱动组4皆位于容纳槽31内。
27.实施例中,如图2、4、5所示,压电执行器驱动组4包括串联的第一压电执行器41和第二压电执行器42,第二压电执行器42夹设于第一压电执行器41和第一端部51之间;第一压电执行器41靠近基座3的一端贴设有垫片411,基座3上设有顶在垫片411上的预紧力调节螺钉412。
28.实施例中,如图2、4、5所示,第二压电执行器42的尺寸短于第一压电执行器41。
29.实施例中,如图2、4、5所示,第一压电执行器41和第二压电执行器42分别平行于动平台2。
30.实施例中,第二压电执行器42固定于第一端部51;第二压电执行器42固定连接于第一压电执行器41。
31.实施例一的工作过程:当对第二压电执行器42施加如图9所示的驱动电压。在t0~t1缓慢变形驱动阶段,第二压电执行器42缓慢伸长,第一连杆5所在的柔性铰链机构将会产生形变,作为动子的动平台2在静摩擦力作用下向前运动,此时静摩擦力为驱动力。在t1~t2快速变形阶段,伸长的第二压电执行器42快速缩回,而动平台2在惯性力的作用下,几乎保持不动。重复上述步骤就能使动平台持续运动,获得较大的运动行程。
32.压电陶瓷驱动器2以上述步进方式驱动动子运动一段位移,到预定的位置。可切换到第一压电执行器41的扫描模式,对第一压电执行器41施加恒定电压后,其缓慢伸长一段位移,驱动器能实现精准定位。
33.实施例二,如图8所示,实施例二的结构和实施例一相似,不同之处在于缺少第三铰链61、第三连杆62、第四铰链63、第二刚性块82、第一柔性薄板91、第二柔性薄板92和第三刚性块83。实施例二的工作过程与实施例一类似。
34.本发明的最佳实施例已阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1