一种用于机器人的电源装置和供电方法与流程
1.本发明涉及电子技术领域,尤其涉及一种用于机器人的电源装置和供电方法。
背景技术:
2.移动机器人主要用于酒店、办公楼等多楼层室内场景,可实现跨楼层的货物运输。当前移动机器人通常采用单电池方案,当电池电量耗尽或者供电故障后,机器人会停在原地,无法回到充电桩位置。另外,由于机器人的作业区域通常较大,工作人员需要自己找到机器人进行充电或者维修,工作量大,维护效率低。
技术实现要素:
3.有鉴于此,本发明实施例提供一种用于机器人的电源装置和供电方法,通过在电源装置中增加备用电池,并使用mos管控制主备电池供电回路的导通和截止,使得在主电池供电回路异常时,切入备用电池,保证机器人能够依靠备用电池回到充电桩位置,可靠性高,降低工作人员的工作量,提高电源的维护效率。
4.为实现上述目的,根据本发明实施例的一方面,提供了一种用于机器人的电源装置。
5.本发明实施例的一种机器人的电源装置,包括:主电池、备用电池、第一放电电路、第二放电电路、控制电路和通信总线,其中,所述主电池、所述备用电池和所述控制电路挂载在所述通信总线上;
6.所述主电池与所述第一放电电路相连,用于在所述第一放电电路的第一mos管导通的情况下,通过所述第一放电电路向所述机器人供电;
7.所述备用电池与所述第二放电电路相连,用于在所述第二放电电路的第二mos管导通的情况下,通过所述第二放电电路向所述机器人供电;
8.所述控制电路与所述第一放电电路和所述第二放电电路相连,用于检测所述主电池的工作状态,根据所述工作状态,控制所述第一mos管和所述第二mos管的其中一个导通,另一个截止。
9.可选地,所述第一放电电路包括第一电阻、第一三极管和所述第一mos管,所述第二放电电路包括第二电阻、第二三极管和所述第二mos管;
10.所述第一电阻的第一端与所述主电池的放电端相连,第二端与所述第一三极管的集电极相连;所述第一三极管的基极与所述控制电路的第一输出端相连,集电极与所述第一mos管的栅极相连;所述第一mos管的漏极与所述主电池的放电端相连,源极与所述机器人的负载相连;
11.所述第二电阻的第一端与所述备用电池的放电端相连,第二端与所述第二三极管的集电极相连;所述第二三极管的基极与所述控制电路的第二输出端相连,集电极与所述第二mos管的栅极相连;所述第二mos管的漏极与所述备用电池的放电端相连,源极与所述机器人的负载相连。
12.可选地,所述控制电路包括控制器和单片机;
13.所述控制器用于检测所述主电池的工作状态,在所述主电池的工作状态正常时,通过所述通信总线向所述单片机发送电平初始化指令;还用于在所述主电池的工作状态异常时,通过所述通信总线向所述单片机发送电平切换指令;
14.所述单片机用于根据所述电平初始化指令,控制所述第一输出端输出低电平且所述第二输出端输出高电平,以使所述第一mos管导通且所述第二mos管截止;还用于根据所述电平切换指令,控制所述第一输出端输出高电平且所述第二输出端输出低电平,以使所述第一mos管截止且所述第二mos管导通。
15.可选地,所述电源装置还包括:挂载在所述通信总线上的电源管理器;
16.所述电源管理器的输入端与所述第一mos管的源极和所述第二mos管的源极相连,输出端与所述机器人的负载相连,用于将输入的电压转换为所述负载所需电压。
17.可选地,所述电源装置还包括:第一至第四单向导通电路,其中,
18.第一单向导通电路设置于所述主电池和所述第一放电电路之间,第二单向导通电路设置于所述备用电池和所述第二放电电路之间,第三单向导通电路设置于所述第一放电电路和所述机器人的负载之间,第四单向导通电路设置于所述第二放电电路和所述机器人的负载之间;
19.所述第一单向导通电路和所述第三单向导通电路用于在所述第二mos管导通的情况下,防止所述备用电池对所述主电池充电;所述第二单向导通电路和所述第四单向导通电路用于在所述第一mos管导通的情况下,防止所述主电池对所述备用电池充电。
20.可选地,所述电源装置还包括:升压电路;
21.所述升压电路的输入端与所述第一单向导通电路的输出端和所述第二单向导通电路的输出端相连接,所述升压电路的输出端与所述第一放电电路的输入端和所述第二放电电路的输入端相连接,用于对所述主电池和所述备用电池输出的电压进行增大。
22.可选地,所述电源装置还包括:降压电路;
23.所述降压电路的输入端与所述第一单向导通电路的输出端和所述第二单向导通电路的输出端相连接,所述降压电路的输出端与所述控制电路的电源端相连接,用于对所述主电池和所述备用电池输出的电压进行减少。
24.可选地,所述控制电路,还用于获取所述主电池和所述备用电池的电量,根据所述电量确定符合预设的充电条件时,向所述机器人下发充电指令,以使所述机器人移动至充电桩所在位置;
25.所述电源装置还包括:充电极片和第五至第六单向导通电路,所述充电极片在与所述充电桩接通后,通过第五单向导通电路向所述主电池充电,通过第六单向导通电路向所述备用电池充电。
26.为实现上述目的,根据本发明实施例的另一个方面,提供了一种用于机器人的供电方法。
27.本发明实施例的一种用于机器人的供电方法,包括:控制电路检测主电池的工作状态,根据所述工作状态,控制第一mos管和第二mos管的其中一个导通,另一个截止,以在所述第一mos管导通的情况下,由所述主电池通过第一放电电路向机器人供电,在所述第二mos管导通的情况下,由备用电池通过第二放电电路向所述机器人供电。
28.可选地,所述方法包括:
29.所述控制电路获取所述主电池和所述备用电池的电量,根据所述电量确定符合预设的充电条件时,向所述机器人下发充电指令,以使所述机器人移动至充电桩所在位置;
30.当充电极片与所述充电桩接通后,通过第五单向导通电路向所述主电池充电,通过第六单向导通电路向所述备用电池充电。
31.为实现上述目的,根据本发明实施例的再一方面,提供了一种电子设备。
32.本发明实施例的一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现本发明实施例的一种用于机器人的供电方法。
33.为实现上述目的,根据本发明实施例的再一方面,提供了一种计算机可读介质。
34.本发明实施例的一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现本发明实施例的一种用于机器人的供电方法。
35.上述发明中的一个实施例具有如下优点或有益效果:在电源装置中增加备用电池,并使用mos管控制主备电池供电回路的导通和截止,使得在主电池供电回路异常时,切入备用电池,保证机器人能够依靠备用电池回到充电桩位置,可靠性高,降低工作人员的工作量,提高电源的维护效率。使用三极管和mos管构建放电电路,使得可以通过控制三极管集电极输出电平的高低,控制mos管的导通和截止。
36.通过单片机控制自身输出电平的高低,进而控制三极管集电极输出电平的高低,实现简单、可靠。通过电源管理器进行电压转换,保证满足机器人负载的电压要求,避免造成机器人损坏。通过单向导通电路的设置,使得在主电池供电时,不会对备用电池充电,在备用电池供电时,同样不会对主电池充电,提高电源装置的供电能力。
37.通过在电源装置中设置升压电路,保证输入到放电电路的电压能够满足其电压要求。通过在电源装置中设置降压电路,避免输入到单片机的电压过大,造成单片机烧毁。通过在电源装置中设置充电电路,使得控制电路在检测到主电池和备用电池的电量较低时,能够及时使用充电电路对主电池和备用电池充电。
38.上述的非惯用的可选方式所具有的进一步效果将在下文中结合具体实施方式加以说明。
附图说明
39.附图用于更好地理解本发明,不构成对本发明的不当限定。其中:
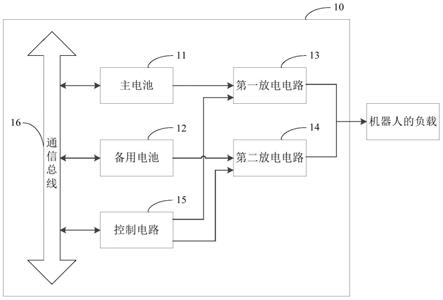
40.图1是根据本发明实施例一的用于机器人的电源装置的电路结构示意图;
41.图2是根据本发明实施例二的用于机器人的电源装置的电路结构示意图;
42.图3是根据本发明实施例三的用于机器人的电源装置的电路结构示意图;
43.图4是根据本发明实施例四的用于机器人的电源装置的电路结构示意图;
44.图5是根据本发明实施例四的用于机器人的电源装置的主电池正常电流路径示意图;
45.图6是根据本发明实施例四的用于机器人的电源装置的主电池异常电流路径示意图;
46.图7是根据本发明实施例四的用于机器人的电源装置的充电电流路径示意图;
47.图8是根据本发明实施例的用于机器人的供电方法的主要流程示意图。
具体实施方式
48.以下结合附图对本发明的示范性实施例做出说明,其中包括本发明实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本发明的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
49.图1是根据本发明实施例一的用于机器人的电源装置的电路结构示意图。如图1所示,本发明实施例的用于机器人的电源装置10包括:主电池11、备用电池12、第一放电电路13、第二放电电路14、控制电路15和通信总线16。其中,主电池11、备用电池12和控制电路15挂载在通信总线16上。
50.主电池11与第一放电电路13相连,用于在第一放电电路13的第一mos管导通的情况下,通过第一放电电路13向机器人供电。备用电池12与第二放电电路14相连,用于在第二放电电路14的第二mos管导通的情况下,通过第二放电电路14向机器人供电。
51.实施例中,使用该电源装置10的机器人可以是移动机器人,比如配送机器人、搬运机器人、抓取机器人等。配送机器人可搭载电梯,到达不同楼层执行包裹配送任务;搬运机器人可以执行货物搬运任务;抓取机器人可以执行货物抓取任务。
52.控制电路15与第一放电电路13和第二放电电路14相连,用于检测主电池11的工作状态,根据主电池11的工作状态,控制第一mos管和第二mos管的其中一个导通,另一个截止。比如,在主电池11工作状态正常时,可以控制第一mos管导通,第二mos管截止;在主电池11工作状态异常时,控制第一mos管截止,第二mos管导通。
53.示例性地,第一放电电路13和第二放电电路14的电路结构相同,均可以包括电阻、三极管和mos管。三极管是一种控制电流的半导体器件,分为pnp和npn两种,且具有三个电极,分别是基极、发射极和集电极。mos管是金属-氧化物-半导体场效应晶体管,分为n沟道和p沟道两种,且具有三个引脚,分别是栅极、源极和漏极。实施例中,三极管可以是npn型三极管,mos管可以是n沟道mos管。
54.具体地,第一放电电路13可以包括第一电阻、第一三极管和第一mos管,第一电阻的第一端与主电池11的放电端相连,第二端与第一三极管的集电极相连;第一三极管的基极与控制电路15的第一输出端相连,集电极与第一mos管的栅极相连;第一mos管的漏极与主电池11的放电端相连,源极与机器人的负载相连。
55.第二放电电路14包括第二电阻、第二三极管和第二mos管,第二电阻的第一端与备用电池12的放电端相连,第二端与第二三极管的集电极相连;第二三极管的基极与控制电路15的第二输出端相连,集电极与第二mos管的栅极相连;第二mos管的漏极与备用电池12的放电端相连,源极与机器人的负载相连。
56.图2是根据本发明实施例二的用于机器人的电源装置的电路结构示意图。如图2所示,本发明实施例的控制电路15包括:控制器151和单片机152,且控制器151和单片机152均挂载在通信总线16上。
57.示例性地,控制器151用于检测主电池11的工作状态,在主电池11的工作状态正常时,通过通信总线16向单片机152发送电平初始化指令;在主电池11的工作状态异常时,通
过通信总线16向单片机152发送电平切换指令。其中,电平初始化指令用于使单片机152对第一输出端和第二输出端输出电平的高低进行初始化。电平切换指令用于使单片机152对第一输出端和第二输出端当前输出电平的高低进行转换。
58.单片机152在接收到控制器151发送的电平初始化指令后,控制其第一输出端输出低电平且第二输出端输出高电平,以使第一放电电路13的第一mos管导通,第二放电电路14的第二mos管截止。单片机152在接收到控制器151发送的电平切换指令后,控制其第一输出端输出高电平且第二输出端输出低电平,以使第一放电电路13的第一mos管截止,第二放电电路14的第二mos管导通。
59.图3是根据本发明实施例三的用于机器人的电源装置的电路结构示意图。如图3所示,本发明实施例的电源装置10还包括:电源管理器17,且电源管理器17挂载在通信总线16上。
60.电源管理器17用于将输入自身的电压转换为机器人的各负载所需电压。此处的负载为机器人内部需要供电的模块。示例性地,电源管理器17与电源装置10中相关电路器件的连接关系可以是:电源管理器17的输入端与第一mos管的源极和第二mos管的源极相连,输出端与机器人的负载相连。
61.在一优选的实施例中,为了提高供电能力,可以在电源装置10中增加一个或者多个单向导通电路。该单向导通电路用于实现电流的单向导通,可以使用二极管等具有单向导通功能的电路元件实现。
62.在第一mos管截止、第二mos管导通的情况下,即由备用电池12供电,为了防止备用电池12对主电池11充电,造成电源装置10供电能力的降低,可以在主电池11和第一放电电路13之间设置一个单向导通电路(可称为第一单向导通电路),还可以在第一放电电路13和机器人的负载之间设置一个单向导通电路(可称为第三单向导通电路)。
63.在第一mos管导通、第二mos管截止的情况下,即由主电池11供电,为了防止主电池11对备用电池12充电,造成电源装置10供电能力的降低,可以在备用电池12和第二放电电路14之间设置一个单向导通电路(可称为第二单向导通电路);还可以在第二放电电路14和机器人的负载之间设置一个单向导通电路(可称为第四单向导通电路)。
64.在另一优选的实施例中,为了保证输入到第一放电电路13、第二放电电路14的电压能够满足其电压要求,可以在电源装置10中增加一个升压电路,该升压电路用于对主电池11和备用电池12输出的电压进行增大。实施例中,升压电路可以通过升压电荷泵实现。
65.示例性地,升压电路与电源装置10中相关电路器件的连接关系可以是:升压电路的输入端与第一单向导通电路的输出端和第二单向导通电路的输出端相连接;升压电路的输出端与第一放电电路13的输入端和第二放电电路14的输入端相连接。
66.实际应用中,为了避免输入到单片机152的电压过大,造成单片机152烧毁,可以在电源装置10中增加一个降压电路,该降压电路用于对主电池11和备用电池12输出的电压进行减少。
67.示例性地,降压电路与电源装置10中相关电路器件的连接关系可以是:降压电路的输入端与第一单向导通电路的输出端和第二单向导通电路的输出端相连接;降压电路的输出端与控制电路15的电源端相连接。
68.在一优选的实现方案中,为了能够及时对主电池11和备用电池12充电,可以在电
源装置10中增加一个充电电路,该充电电路用于在机器人电量低时,对主电池11和备用电池12进行充电。示例性地,充电电路可以是充电极片,该充电极片可以是金属片(比如铜金属片),在与充电桩接通后,向主电池11和备用电池12充电。
69.关于机器人电量高低的检测,可以由控制电路15实现。也即本实施例中,控制电路15还用于获取主电池11和备用电池12的电量,根据电量确定符合预设的充电条件时,向机器人下发充电指令,以使机器人移动至充电桩所在位置。充电条件比如可以为电量小于设定阈值,符合充电条件则认为机器人电量低。
70.另外,为了避免充电极片不充电时,主电池11和备用电池12的电流反流到充电极片,造成充电极片带电而引发危险,需要在充电极片与主电池11之间、充电极片与备用电池12之间增加单向导通电路。同样地,该单向导通电路用于实现电流的单向导通,可以使用二极管等具有单向导通功能的电路元件实现。
71.此时充电电路由充电极片、第五单向导通电路和第六单向导通电路构成。其中,充电极片用于在与充电桩的电极片接触后,通过第五单向导通电路向主电池11充电,通过第六单向导通电路向备用电池12充电。
72.该充电电路与电源装置10中相关电路器件的连接关系可以是:充电极片的第一放电端与第五单向导通电路的正向端相连,第二放电端与第六单向导通电路的正向端相连;第五单向导通电路的负向端与主电池11的充电端相连;第六单向导通电路的负向端与备用电池12的充电端相连。
73.图4是根据本发明实施例四的用于机器人的电源装置的电路结构示意图。如图4所示,本发明实施例四的电源装置10包括:主电池11、备用电池12、第一放电电路13、第二放电电路14、控制电路15、通信总线16、电源管理器17、升压电路、降压电路、充电电路和第一至第六单向导通电路。
74.第一放电电路13包括第一电阻(r1)、第一三极管(npn1)和第一mos管(nmos1);第二放电电路14包括第二电阻(r2)、第二三极管(npn2)和第二mos管(nmos2);控制电路15包括控制器151和单片机152;第一至第六单向导通电路对应为二极管d1至d6。
75.主电池11、备用电池12、控制器151、单片机152和电源管理器17共同挂载在通信总线16上。控制器151、单片机152和电源管理器17可通过通信总线16读取主电池11、备用电池12的工作状态。控制器151可以是机器人自身的控制器,用于通过通信总线16向单片机152发送指令;单片机152根据指令执行具体动作。电源管理器17可用于将电池的输出转换为机器人的各负载需要的不同电压,比如将电池的48v或者24v输出,转换为5v、12v,并进行短路保护等。
76.本实施例的电源装置10中,主电池11的放电端可通过二极管d1,备用电池12的放电端可通过二极管d2,再经过降压电路向单片机152供电,同时经过升压电路转换为电压v1的电源。充电极片可通过二极管d5向主电池11充电,通过二极管d6向备用电池12充电。
77.单片机152的第一输出端(io1)输出高电平时,npn1导通,v2点电压为0,nmos1截止。单片机152的io1输出低电平时,npn1截止,v2点电压为v1,nmos1导通。单片机152的第二输出端(io2)输出高电平时,npn2导通,v3点电压为0,nmos2截止。单片机152的io2输出低电平时,npn2截止,v3点电压为v1,nmos2导通。
78.图5是根据本发明实施例四的用于机器人的电源装置的主电池正常电流路径示意
图。如图5所示,在主电池11的工作状态正常时,主电池11经过二极管d1向升压电路、降压电路供电。此时,单片机152的io1输出低电平,nmos1导通,io2输出高电平,nmos2截止。主电池11的电流经过nmos1向机器人的电源管理器17供电。
79.图6是根据本发明实施例四的用于机器人的电源装置的主电池异常电流路径示意图。如图6所示,在主电池11的工作状态异常时,比如主电池11电量耗尽、发生故障等,备用电池12经过二极管d2向升压电路、降压电路供电。此时,单片机152的io1输出高电平,nmos1截止,io2输出低电平,nmos2导通。备用电池12的电流经过nmos2向机器人的电源管理器17供电。
80.图7是根据本发明实施例四的用于机器人的电源装置的充电电流路径示意图。如图7所示,当机器人电量低时,机器人返回充电桩位置,并使充电极片与充电桩的电极片相接触,进而使充电极片通过二极管d5向主电池11充电,通过二极管d6向备用电池12充电。
81.图8是根据本发明实施例的机器人的供电方法的主要步骤的示意图。如图8所示,本发明实施例的机器人的供电方法,主要包括如下步骤:
82.步骤s801:控制电路检测主电池的工作状态,根据主电池的工作状态,控制第一mos管和第二mos管的其中一个导通,另一个截止。如果主电池的工作状态正常,则控制第一mos管导通,第二mos管截止;如果主电池的工作状态异常,则控制第一mos管截止,第二mos管导通。
83.步骤s802:在第一mos管导通的情况下,主电池通过第一放电电路向机器人供电,在第二mos管导通的情况下,备用电池通过第二放电电路向机器人供电。
84.在一优选的实施例中,所述供电方法还包括:控制电路获取主电池和备用电池的电量,根据电量确定符合预设的充电条件时,向机器人下发充电指令,以使机器人移动至充电桩所在位置;当充电极片与充电桩接通后,通过第五单向导通电路向主电池充电,通过第六单向导通电路向备用电池充电。
85.从以上描述可以看出,通过在电源装置中增加备用电池,并使用mos管控制主备电池供电回路的导通和截止,使得在主电池供电回路正常时,备用电池不放电,在主电池供电回路异常时,切入备用电池,保证机器人能够依靠备用电池回到充电桩位置,可靠性高,降低工作人员的工作量,提高电源的维护效率。
86.上述具体实施方式,并不构成对本发明保护范围的限制。本领域技术人员应该明白的是,取决于设计要求和其他因素,可以发生各种各样的修改、组合、子组合和替代。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1