一种基于旋变的船用转台电机伺服驱动器电路及驱动器的制作方法
1.本发明属于伺服驱动器技术领域,具体涉及一种基于旋变的船用转台电机伺服驱动器。
背景技术:
2.由于旋转变压器具有结构简单、动作灵敏、成本低、环境适应性强以及抗干扰能力强等优点,因此基于旋变的永磁同步电机在众多领域得到了广泛地应用,尤其在船舶、石油等特殊领域,从而使得基于旋变的永磁同步电机驱动控制技术的研究成为一种趋势。
3.船用转台系统由于使用环境较为复杂,因此对电机及驱动器具有较高的要求,不仅要求驱动器具有良好的环境适应能力、快速响应能力、高精度的控制能力以及多功能性,同时要求其具有便捷操作性、低成本性以及可维护性。
4.但是现有技术的伺服驱动器难以达到以上要求。船用转台电机通常采用霍尔传感器或编码器电机,霍尔传感器电机驱动器结构简单,但存在可靠性低、环境适应性差及控制精度较低等缺点,因此不适用于高精度伺服及具有特殊环境要求的场合。编码器电机驱动器结构较为复杂,且体积较大、成本较高、抗干扰能力较差,且系统维护成本较大。同时,对于传统船用转台系统,通常除电机自带位置传感器外,在传动机构处还需增加位置传感器保证控制性能,不仅增加了驱动器及系统成本,而且在特殊环境下信号处理及控制难度增大,提高了对驱动器整体性能的要求。
技术实现要素:
5.本发明的目的在于克服现有技术中的不足,提供一种基于旋变的船用转台电机伺服驱动器电路及驱动器,具有较高的位置、速度采样精度,运行过程稳定性高,具有较强的抗干扰能力和环境适应性。
6.为达到上述目的,本发明是采用下述技术方案实现的:第一方面,本发明提供一种基于旋变的船用转台电机伺服驱动器电路,所述电路包括:主控单元、旋变信号调理单元、功率驱动单元、采样保护单元、功能单元以及电源管理单元;所述主控单元用于进行电机控制算法的实现、采样信号的接收、相关数据的运算处理、驱动及功能控制信号的输出、系统故障的判断及处理功能;所述功率驱动单元用于进行驱动信号的隔离输出、驱动能力的增强以及后级功率器件的开关控制功能;所述旋变信号调理单元用于进行旋转变压器激励信号调理输出、旋变反馈输出信号调理、解算功能;所述采样保护单元用于对所采集的电流、电压及温度信号进行放大、滤波调理后输出给主控单元,实现电机控制及系统保护功能;所述功能单元用于进行系统位置复位、抱闸控制以及限位功能,实现转台实际运
行功能要求及保护措施;所述电源管理单元用于将输入控制电压转换为不同电压等级为各个功能单元进行供电。
7.进一步的,所述电路的运行方法包括:系统运行时,旋变信号调理单元将激励信号调理放大后输出给旋转变压器,然后将旋变所反馈的位置、速度信号进行调理、解码运算,通过串行io端口传输给主控单元,主控单元根据所采集到的位置、速度信息以及上位机或端口所发送的控制信号判断电机实际运行状态,输出相对应的pwn驱动信号,驱动信号经过功率驱动单元增强后输出,通过控制功率器件的开通与关断实现对电机运行状态的实时控制,最终实现对系统运行状态的控制;采样保护单元所采集的电压、电流、温度等信号经过调理后送入主控芯片的ad端口,主控芯片根据所采集的数据信息对比判断系统运行状态,在出现相关故障时及时进行保护措施;功能单元根据上位机或端口输入信号进行信号电平转换,从而控制主控芯片引脚电平,主控芯片根据引脚电平高低判断功能要求,然后控制相关输出信号实现抱闸、复位、限位功能。
8.进一步的,所述电源管理单元包括电源转换模块、高低压滤波电容和支撑电容;所述电源转换模块用于将所述输入控制电压转换为分别向旋变信号调理单元及功率驱动单元供电的电压以及为主控单元及采样保护单元供电的电压。
9.进一步的,所述主控单元采用单片机dspic33f128mc804作为系统主控芯片;系统运行过程中,所述主控芯片根据控制信号及相关采样信号进行数据运算,输出pwm驱动信号,该信号由引脚传输至功率驱动单元,从而驱动电机进行不同运行状态的切换;电压、电流及温度采样信号分别通过串口传输至主控单元,主控芯片经过采样数据的处理、运算,对系统运行状态进行判断,在系统发生故障时及时进行保护停机及抱闸动作;位置复位信号输入主控单元,所述主控芯片在接收到位置复位信号后,输出pwm驱动信号控制电机带动转台自动转停至所设定的零点处并关闭抱闸;电机或转台抱闸信号由引脚传输至主控单元;限位信号输入主控单元,当功能单元接收到限位信号后送至主控单元,主控芯片控制电机停转并进行关闸动作;旋转变压器解码芯片的复位信号、采样信号、数据控制信号分别通过该芯片引脚与主控芯片进行数据传输,主控单元根据所传输的信号进行电机速度、位置判断,控制pwm驱动信号的输出,从而实现对系统的控制。
10.进一步的,所述功率驱动单元采用ir2110驱动芯片,包括自举电容、自举二极管和vcc的滤波电容;主控芯片驱动信号分别由芯片引脚输入,每一组驱动信号经自举驱动后输出2路驱动信号,分别驱动后级全桥中同一桥臂上、下两个开关管,从而实现对电机三相的输出。
11.进一步的,所述旋变信号调理单元采用ad2s1210解码芯片为旋转变压器解码芯
片,包括旋变信号解码电路、信号调理电路和激励信号放大电路;所述激励信号放大电路包括ad8662运算放大器和后级推挽输出电路;旋转变压器解码芯片输出一对正交的正弦激励信号,该激励信号通过运算放大器放大处理后传递到推挽电路输入端,然后经推挽电路处理后由传递至旋转变压器初级侧;推挽电路采用两个基本参数相同、结构不同的功率三极管,用于根据输入信号依次轮流导通,增强输出励磁信号;所述信号调理电路包括阻抗匹配电阻和滤波电容;旋转变压器解码芯片用于对旋变输出的正余弦信号进行数据解码运算,然后根据主控芯片所发出的控制信号,将电机的位置信号或速度信号通过串口传输至主控单元,从而实现对电机的控制。
12.进一步的,采样保护单元包括电流采样调理电路、温度采样电路和电压采样电路;所述电流采样调理电路为单级运算放大电路,用于采集三相电流,并将三相电流经电流采样电阻转换为电压信号;所述电压采样电路中,输入功率电压经分压后输入主控芯片a/d采样引脚,用于实现电压信号采集及电压保护功能。
13.所述温度采样电路中包括贴片式温度传感器,所述贴片式温度传感器与主控芯片a/d采样端口连接。
14.进一步的,所述功能单元包括抱闸开关电路、位置置零复位电路和限位开关电路;所述抱闸开关电路包括续流二极管、后级晶体管、继电器;抱闸开关信号输入后,后级晶体管根据输入信号的电平高低判断是否导通,当晶体管导通时,继电器线圈中有电流流过,继电器闭合,从而给电机抱闸供电开启;当晶体管关断时,继电器线圈处于开路状态,电机抱闸断电闭合;所述续流二极管用于当晶体管关断后,与继电器线圈构成回路,释放线圈中储存的能量;所述位置置零复位电路的复位端口与外部端口连接,后级经光耦隔离器进行隔离,输出端直接与主控芯片io端口连接;当复位信号输入时,光耦隔离器二极管导通,输出+3.3v电压,主控芯片io端口为高电平,实现位置复位功能;所述限位开关电路的限位信号端口与外部端口连接,后级经光耦隔离器进行隔离,输出端与主控芯片io口连接。
15.第二方面,本发明提供一种基于旋变的船用转台电机伺服驱动器,包括第一方面所述的驱动器电路。
16.与现有技术相比,本发明所达到的有益效果:1、本技术所提出的基于旋转变压器的小功率船用转台电机伺服驱动器各功能模块电路拓扑结构简单,采用基本模拟电路结构进行功能实现,避免了集成型器件在特殊环境下应用要求高、维护成本高等缺点,具有成本低、体积小、可靠性高等优点;同时基于旋转变压器反馈进行设计,配合增强型推挽输出及输入信号调理电路对信号进行处理,而且设有多种旋变信号故障保护功能,具有较强的抗干扰能力和适应性,能够长时间在海面极端环境下正常工作。
17.2、本技术的驱动器采用高精度补偿控制算法,具有较高的位置和速度控制精度,从而使系统在特殊环境下安全、可靠运行,满足平台实际应用要求,具有较高的稳定性。
18.3、本技术的整体电路结构简单,体积较小,空间适应性强,成本低;4、本技术的驱动器具有较高的位置、速度采样精度,运行过程稳定性高,具有较强的抗干扰能力和环境适应性;本技术的驱动器基于旋转变压器进行位置反馈,相较于其他位置传感器具有更高的安全可靠性;5、本技术的驱动器运行过程中不仅具有较高的速度控制精度,同时不需要再外部传动机构增加位置传感器情况下,仅通过电机自带旋变即可实现较高精度的位置伺服控制,降低了成本;该驱动器不仅可通过上位机实现速度、位置伺服控制,而且通过外部接口信号实现控制,可适应不同控制操作环境。
19.6、本技术的驱动器中大多数均采用被动型元器件进行信号处理等功能,且所选用元器件均为耐高温器件,对于特殊工作环境有较强的适应性,同时进一步提高了整体的稳定性。
20.7、本技术的驱动器通过对相关数据的配置可实现对不同类型、参数的旋转变压器进行适配,具有较强的通用性及适用性。
21.8、本技术的驱动器具有多种故障判断及处理功能,以及限位、复位功能,有效保护系统安全,具有较强的稳定性。
附图说明
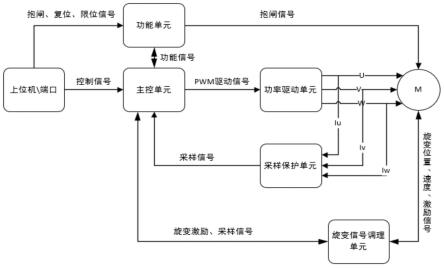
22.图1是本发明的系统功能结构图;图2是本发明的电源管理单元图;图3是本发明的主控单元结构示意图;图4是本发明的功率驱动单元结构示意图;图5是本发明的旋变信号调理单元结构示意图;图6是本发明的采样保护单元结构示意图;图7是本发明的功能单元结构示意图。
具体实施方式
23.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
24.实施例一:本实施例提供一种基于旋转变压器的船用转台电机伺服驱动器电路,该驱动器的系统电路主要分为六个部分,分别为主控单元、旋变信号调理单元、功率驱动单元、采样保护单元、功能单元以及电源管理单元,系统主要功能结构如下图1所示。
25.其中,主控单元主要进行电机控制算法的实现、采样信号的接收、相关数据的运算处理、驱动及功能控制信号的输出、系统故障的判断及处理等功能;功率驱动单元主要进行驱动信号的隔离输出、驱动能力的增强以及后级功率器件的开关控制功能;旋变信号调理单元主要进行旋转变压器激励信号调理输出、旋变反馈输出信号调理、解算等功能;采样保护单元主要对所采集的电流、电压及温度等信号进行放大、滤波调理后输出给主控单元,实现电机控制及系统保护功能;功能单元主要进行系统位置复位、抱闸控制以及限位功能,实
现转台实际运行功能要求及保护措施;电源管理单元主要将输入控制电压转换为不同电压等级为各个功能单元进行供电。
26.系统运行时,旋变信号调理单元将激励信号调理放大后输出给旋转变压器,然后将旋变所反馈的位置、速度信号进行调理、解码运算,通过串行io端口传输给主控单元,主控单元根据所采集到的位置、速度信息以及上位机或端口所发送的控制信号判断电机实际运行状态,输出相对应的pwn驱动信号,驱动信号经过功率驱动单元增强后输出,通过控制功率器件的开通与关断实现对电机运行状态的实时控制,最终实现对系统运行状态的控制。在此过程中,采样保护单元所采集的电压、电流、温度等信号经过调理后送入主控芯片的ad端口,主控芯片根据所采集的数据信息对比判断系统运行状态,在出现相关故障时及时进行保护措施。同时,功能单元根据上位机或端口输入信号进行信号电平转换,从而控制主控芯片引脚电平,主控芯片根据引脚电平高低判断功能要求,然后控制相关输出信号实现抱闸、复位、限位等功能。
27.电源管理单元如图2所示,其主要由电源转换模块、高低压滤波电容和支撑电容组成,主要作用是将系统输入的控制电压转换为各个单元所需的供电电压,实现系统能源供给。系统输入控制电压为+24vdc,其一方面为功能单元进行供电,另一方面经各电源模块分别转换为+15vdc、+5vdc及+3.3vdc。其中,+15vdc及+5vdc分别向旋变信号调理单元及功率驱动单元供电;+3.3vdc为主控单元及采样保护单元供电。
28.主控单元如图3所示,其采用单片机dspic33f128mc804作为系统主控芯片,通过控制算法可实现以下功能:旋变反馈信号处理以及旋变型号参数配置;电机驱动及功能控制信号输;电流、电压、温度采样信号数据处理及相关故障保护;位置复位、抱闸使能及位置限位等功能的实现。
29.系统运行过程中,主控芯片根据控制信号及相关采样信号进行数据运算,输出pwm驱动信号,该信号由引脚p1h、p1l、p2h、p2l、p3h、p3l直接传输至功率驱动单元,从而驱动电机进行不同运行状态的切换。电压、电流及温度采样信号分别由u、v、w、dc、temp引脚通过串口直接传输至主控单元,主控芯片经过采样数据的处理、运算,对系统运行状态进行判断,在系统发生过流、过温、欠压、堵转等相关故障时及时进行保护停机及抱闸动作,确保系统整体安全、稳定运行。位置复位信号由reset引脚输入主控单元,主控芯片在接收到复位信号后,输出pwm驱动信号控制电机带动转台自动转停至所设定的零点处并关闭抱闸,同时该功能也可作为位置校准功能,保证转台伺服运行过程中的位置精度。电机或转台抱闸信号由bz引脚传输至主控单元,在电机运行、停止或故障时进行相应的开关动作,确保转台稳定性以及防止误动。转台限位信号由xwl、xwr引脚输入,当功能单元接收到限位信号后送至主控单元,主控芯片控制电机停转并进行关闸动作,或者转台到达限位处后自动进行位置复位操作。旋转变压器解码芯片的复位信号、采样信号、数据控制信号分别通过该芯片/dreset、/wr、/sample、a0、a1、dos、lot引脚与主控芯片进行数据传输,主控单元根据所传输的信号进行电机速度、位置判断,控制pwm驱动信号的输出,从而实现对系统的控制,而且通过相关数据的配置可对不同类型、参数旋转变压器进行适配,具有较强的通用性及适用性,同时通过对所采集信号的分析,可实现对旋转变压器基本故障的判断。
30.功率驱动单元如图4所示,采用ir公司生产的ir2110驱动芯片,该芯片是一种双通道高压、高速电压型开关器件栅极驱动电路,其具有自举悬浮电源,驱动电路比较简单。主
控芯片驱动信号分别由ir2110芯片hin、lin引脚输入,每一组ph、pl驱动信号经自举驱动后输出2路驱动信号ho、lo,分别驱动后级全桥中同一桥臂上、下两个开关管,从而实现对电机三相的输出。其中,c2、d2分别为自举电容和自举二极管,c3为vcc的滤波电容。假设在上管关断期间c2已充电完成(vc2≈vcc)。当hin为高电平时vc2加到上管的栅极和发射极之间,使其导通,此时vc2可等效为电压源。当hin为低电平时,上管栅极短接发射极,该管关断。经短暂的死区时间后,lin为高电平,下管导通,vcc经vd2,导通的下管给c2充电,如此循环反复。当上管导通,下管关断时,上通道通过内部高电平转换电路悬浮在高压侧。
31.旋变信号调理单元如图5所示,主要分为旋变信号解码电路、调理电路和激励信号放大电路。其中旋转变压器解码芯片选取ad2s1210解码芯片,其不仅跟踪速率大、信号处理精度高,而且具有可编程性和系统故障检测性,可根据实际系统进行选择性适配,适用性较强;激励信号放大电路采用ad8662运算放大器和后级推挽输出电路组成,该设计具有良好的输出特性及输出能力,同时可有效保证输出波形,降低信号干扰。
32.旋转变压器解码芯片输出一对正交的exc、/exc正弦激励信号,该激励信号通过运算放大器放大处理后传递到推挽电路输入端,然后经推挽电路处理后由ref+、ref-引脚直接传递至旋转变压器初级侧。其中,运算放大器的作用是对激励信号进行幅值,推挽电路的作用是提高输出驱动能力。激励信号幅值可根据旋转变压器的型号进行判断,通过调节电阻r1/r2的比值进行配置,而基准电压则通过r3和r4分压比例进行确定;推挽电路采用两个基本参数相同、结构不同的功率三极管,分别为q1的npn管和q2的pnp管,其作用为根据输入信号依次轮流导通,增强输出励磁信号,从而使旋转变压器初级产生励磁磁场,然后在次级产生感应信号。旋转变压器输出的差分信号sin+、sin-、cos+、cos-经过调理单元变为sin、sinlo、cos和coslo后直接传递给旋转变压器解码芯片进行解算。
33.信号调理电路由阻抗匹配电阻r9、r10和滤波电容c3、c4、c5、c6组成,差分信号经电阻进行阻抗匹配后,可消除差模信号干扰,滤波电容可进一步降低信号干扰,同时消除信号脉冲尖峰。
34.旋转变压器解码芯片对旋变输出的正余弦信号进行数据解码运算,然后根据主控芯片所发出的控制信号,将电机的位置信号或速度信号通过串口传输至主控单元,从而实现对电机的控制。
35.在此过程中,主控芯片实时对所采集的信号进行检测,若存在信号丢失、信号范围异常、输入信号失配、位置信号跟踪异常、转速异常等故障,及时进行故障判断及处理,保证系统稳定性。
36.采样保护单元如图6所示,主要分为电流采样调理电路、温度采样电路和电压采样电路。三相电流经电流采样电阻转换为电压信号iu、iv、iw,其中,电压信号与相电流ip转换关系为vo=0.01*ip。信号调理电路为单级运算放大电路,主要作用为提高输入阻抗,降低输出阻抗,将电压信号调整为单片机io端口所需范围内的信号,同时对信号起一定的缓冲作用。所转换的电压信号经过运放电路处理为基准为1.65v(相电流为零时),输出电压范围为0-3.3v的电压信号u、v、w,然后直接传输至主控芯片的a/d采样引脚,通过a/d采样实现电流信号的采集及电流保护功能。
37.电压采样电路中,输入功率电压经电阻r2、r6分压后输入主控芯片a/d采样引脚,实现电压信号采集及电压保护功能,其中,r1为限流电阻。温度采样电路中,采用贴片式温
度传感器,当温度发生变化时,温度传感器ptc1阻值发生变化,由于r41的分压作用,温度传感器两端电压随之发生变化,该电压信号经主控芯片a/采样端口输入,经主控芯片运算后实现对控制器温度的时事检测及温度保护功能。
38.功能单元如图7所示,主要分为抱闸开关电路、位置置零复位电路和限位开关电路。抱闸开关功能、位置置零复位功能和限位功能不仅可以通过主控控制单元进行控制,同时可通过外部端口直接进行控制,不仅有效提高了系统容错率,而且可以根据不同使用情况进行配置,具有较高的适用性。其中,抱闸开关电路中,抱闸开关信号由bz引脚输入后,后级晶体管根据输入信号的电平高低判断是否导通,当晶体管导通时,继电器j1线圈中有电流流过,继电器闭合,从而给电机抱闸供电开启;当晶体管关断时,继电器线圈处于开路状态,电机抱闸断电闭合。d19为续流二极管,当晶体管关断后,与继电器线圈构成回路,释放线圈中储存的能量。
39.位置置零复位电路中,复位端口reset1直接与外部端口连接,后级经一个光耦隔离器u7进行隔离,输出端直接与主控芯片io端口连接。采用光耦隔离器进行信号传输控制,不仅可以有效防止干扰误动,而且可以在发生故障时保护主控芯片。当复位信号输入时,光耦隔离器二极管导通,输出+3.3v电压,主控芯片io端口为高电平,实现位置复位功能。其中,r117、r118分别为稳压限流电阻。
40.限位开关电路结构与工作原理与位置置零复位电路相似,限位信号端口xwl、xwr直接与外部端口连接,后级经光耦隔离器进行隔离,输出端与主控芯片io口连接。当转台运行到限位处,限位信号端口输入限位信号,光耦隔离器二极管导通,输出+3.3v电压,主控芯片io端口为高电平,实现限位功能。
41.上述功同时可以通过上位机进行操作,上位机通过通信将功能信号传输至主控芯片,主控芯片通过功能判断进行相应的功能控制信号输出,从而实现远程控制。
42.实施例二:本实施例提供一种基于旋转变压器的船用转台电机伺服驱动器,其包括实施例一所述的船用转台电机伺服驱动器电路。
43.该小功率船用转台电机伺服驱动器不仅具有成本低、体积小、可靠性高等优点,同时具有较强的抗干扰能力和环境适应性,能够长时间在海面极端环境下正常工作。该驱动器采用高精度补偿控制算法,具有较高的位置和速度控制精度,从而使系统在特殊环境下安全、可靠运行,满足平台实际应用要求,具有较高的稳定性。
44.在本实施例的描述中,需要说明的是,如出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等,其所指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实施例的限制。
45.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
46.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接或一体地连接;可以是机
械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
47.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
48.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”,“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
49.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1