三相逆变器的制作方法
三相逆变器
1.本技术是申请日为2019年2月27日、国家申请号为201910147527.x、发明名称为“三相逆变器”的申请的分案申请。
技术领域
2.本发明涉及一种通过对用于驱动三相逆变器(inverter)的半导体开关元件的pwm(脉冲宽度调制)脉冲的生成时机(timing)进行操作,以降低直流部的电容器中流动的高频电流(纹波电流(ripple current)),从而对电容器的发热进行抑制的技术。
背景技术:
3.图10是对感应电动机(induction motor)等的负载m进行驱动的三相二级全桥(2level full-bridge)逆变器(下面称“逆变器”)的主电路构成图。
4.图10中,s
up
、s
un
、s
vp
、s
vn
、s
wp
、及s
wn
为igbt(绝缘栅极双极型晶体管)等的半导体开关元件,m为负载,c
dc
为与逆变器的直流部连接的电容器,e
dc
为逆变器的直流输入电压,i
dcin
为直流母线电流,iu、iv、及iw为各相的交流输出电流,v
uv
、v
vw
、及v
wu
为各线之间的电压。
5.图11示出了由逆变器输出的电压向量(瞬时空间向量)、与各电压向量相对应的u相、v相、及w相的开关动作模式(pattern)(su,sv,sw)、及i
dcin
。
6.开关动作模式(su,sv,sw)中,「1」表示上臂的开关元件为on(连通)的状态,「0」表示下臂的开关元件为on的状态,例如,(1,0,0)表示u相的上臂的开关元件s
up
为on且v相和w相的下臂的开关元件s
vn
和s
wn
为on的状态。
7.由图11显然可知,就直流母线电流i
dcin
的瞬时值而言,根据电压向量即开关动作模式,其绝对值与逆变器的各相的输出电流中的一个相等,并且其极性也唯一确定。
8.例如,在电压向量v1中,开关动作模式为上述的(1,0,0),开关元件s
up
、s
vn
、及s
wn
为on,所以i
dcin
与+iu相等。
9.接着,对逆变器产生三相交流电压,并向负载m供给三相交流电流的情况下的动作进行说明。
10.图12(a)是表示逆变器的各相的输出电压vu、vv、及vw和电流iu、iv、及iw的波形图。这里,电压和电流为三相正弦波,电压振幅(相当于调制率)=0.7[pu],电流振幅=0.5[pu],功率因数(power factor)=1。需要说明的是,pu是“每单位”(per unit)的略称,表示相对于基准值(例如,最大值)的比率。
[0011]
一般而言,三相逆变器按照交流的相位角60
°
来调换相和上下臂的开关元件以反复进行相同的动作,所以只要对60
°
的期间的动作进行规定,就可对整个期间的动作进行规定。这里,以三相中的u相电压vu取最大值的电压相位角θ=60
°
~120
°
的期间为例进行说明。需要说明的是,忽略了开关动作时的电压和电流的纹波成分。
[0012]
图12(b)示出了通过将相当于图12(a)的电压相位角θ=80
°
的纵线部分的各相输出电压vu、vv、及vw的电压指令值与载波(三角波)进行比较而得到的开关动作模式(su,sv,sw)和与该模式相对应的电压向量、直流母线电流i
dcin
及其平均值i
dcave
。
[0013]
这里,开关动作模式(su,sv,sw)仅是用于将各相的输出电压控制为预定值的输出电压脉冲、即各相的pwm脉冲,所以在下面的说明中,也将记号su、sv、及sw使用为各相的pwm脉冲(或仅称为“脉冲”)。
[0014]
就图12(b)的脉冲su、sv、及sw中的high电平(level)的部分而言,相当于开关动作模式的「1」,是上臂的开关元件为on的状态,下面,为了方便起见将该部分称为“正侧脉冲”。另外,就脉冲su、sv、及sw中的low电平的部分而言,相当于开关动作模式的「0」,是下臂的开关元件为on的状态,下面,为了方便起见将该部分称为“负侧脉冲”。
[0015]
图12(b)中示出了载波(其周期为ts)的一个周期,并假设该周期ts内的电压指令值为一定。由该图可知,i
dcin
取与三相交流电流中的一相电流相等的值,并为呈阶梯波状变化的电流。需要说明的是,图13是表示图12(b)中的直流母线电流i
dcin
及其平均值i
dcave
的波形图。
[0016]
此外,图12(b)中,通过在载波周期(开关动作周期)ts内使电压向量按照v0→v1
→v6
→v7
→v6
→v1
→v0
的顺序进行变迁(transition),相对于各相的上臂的开关元件s
up
、s
vp
、及s
wp
的正侧脉冲宽度可分别变为t
su
、t
sv
、及t
sw
,这些脉冲宽度会原样地成为各开关元件s
up
、s
vp
、及s
wp
的on期间。
[0017]
另外,逆变器的直流部上设置的电容器c
dc
起到使i
dcin
中包含的高频成分(纹波成分)输出的作用。一般而言,对逆变器进行pwm控制时的载波频率为数[khz]~数十[khz],根据规格的不同,也存在数百[khz]的情况,为此,i
dcin
包含了其频率以上的高频成分。为了响应性良好地对该高频成分进行供给,需要具有与主电路的开关元件接近并与其连接的电容器。
[0018]
另一方面,i
dcin
的高频成分的流通会导致电容器发生损失,该损失会使电容器的温度上升。温度一旦上升,电容器的寿命就会变短,所以,为了抑制温度的上升,需要使用大型(大容量)的电容器,或者需要采取提高电容器的冷却装置的能力等的措施,这些都是会引起装置整体的大型化和/或高成本化的原因。
[0019]
鉴于上述问题,例如,非专利文献1中公开了如下一种技术,即:根据负载功率因数的波动,在以往一般常用的空间向量控制方式和对输出线间电压脉冲的重复(overlap)为最小那样的空间向量进行选择的控制方式之间进行切换,藉此降低三相逆变器的直流母线电流的高频成分甚至电容器中流动的高频电流。
[0020]
[现有技术文献]
[0021]
[非专利文献1]西澤是呂久
ほか
,「三相
インバータの
功率因数変化
に
対応
した
入力電流高調波
を
低減
する
空間
ベクトル
変調方式」,半導体電力変換/
モータドライブ
合同研究会論文,電気学会北海道支部,spc-15-133,2015年8月28日
技术实现要素:
[0022]
[发明要解决的课题]
[0023]
非专利文献1记载的控制方式以所谓的两相调制为基础,该两相调制中,在多个周期内,电流在被固定为on状态的开关元件中连续流动。为此,逆变器的输出频率等的条件会导致出现如下问题等,即:1)特定的开关元件过热,2)与三相调制相比,开关动作次数变少,招致噪音增加,3)执行两相调制时,各相的电压指令值发生骤变,所以会引起电气紊乱和/
或冲击(shock)。
[0024]
因此,本发明要解决的课题在于,通过使pwm脉冲按照预定的规则进行移动(shift),并对其产生时机进行调整,可不会出现非专利文献1中存在的各种问题地降低三相逆变器的直流母线电流中包含的高频成分,由此可抑制电容器温度的上升,并可防止包括冷却装置在内的装置整体的大型化和/或高成本化。
[0025]
[用于解决课题的手段]
[0026]
为了解决上述课题,根据本发明的一方面,提供一种三相逆变器,其为三个由两个半导体开关元件进行了串联的串联电路相对于与直流电压源并联的电容器相互并联、将所述两个半导体开关元件之间的连接点作为各相的交流输出端子、并按照每个预定的开关动作周期根据各相的pwm脉冲对所述半导体开关元件进行控制的三相逆变器,其特征在于,生成一个开关动作周期中的三相的pwm脉冲,所述三相的pwm脉冲包含三相的pwm脉冲中的除了正侧脉冲的脉冲宽度为最大的相之外的其他两相的正侧脉冲,所述其他两相的正侧脉冲的相互位置关系是如下位置关系,即:与一相的正侧脉冲包含了另一相的正侧脉冲的状态相比,时间轴上的重复范围较少的位置关系。
[0027]
[发明效果]
[0028]
根据本发明,通过使用于驱动三相逆变器的半导体开关元件的pwm脉冲按照预定的规则进行移动从而调整其生成时机,可降低直流母线电流中包含的高频成分进而抑制电容器温度的上升。据此,可降低装置的冷却能力,并有助于装置整体的小型化和/或低成本化。
附图说明
[0029]
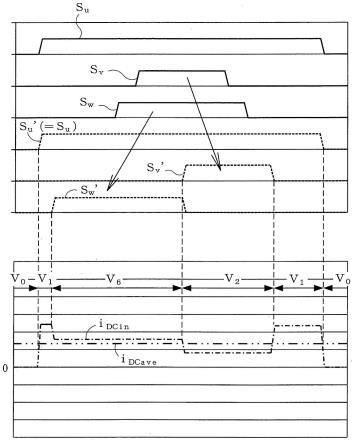
[图1]对本发明的实施方式的pwm脉冲的生成方法和直流母线电流及其平均值等进行表示的波形图。
[0030]
[图2]对本发明的实施方式的pwm脉冲的生成方法和直流母线电流及其平均值等进行表示的波形图。
[0031]
[图3]对基于功率因数角的各相电压和电流与表1的移动操作模式(mode)之间的关系进行表示的图。
[0032]
[图4]对图3的预定的功率因数角的pwm脉冲的生成方法和直流母线电流及其平均值等进行表示的波形图。
[0033]
[图5]用于对三角波比较方式的pwm控制中的脉冲的操作方法进行说明的波形图。
[0034]
[图6]用于对三角波比较方式的pwm控制中的脉冲的操作方法进行说明的波形图。
[0035]
[图7]用于对模式切换时的脉冲的操作方法进行说明的波形图。
[0036]
[图8]用于对模式切换时的脉冲的操作方法进行说明的波形图。
[0037]
[图9]本发明的实施方式中使用的控制装置的功能框图。
[0038]
[图10]三相二级全桥逆变器的主电路构成图。
[0039]
[图11]对逆变器的输出电压向量、开关动作模式、及直流母线电流的关系进行表示的图。
[0040]
[图12](a)是表示逆变器的各相输出电压和电流的波形图,(b)是表示pwm控制中的开关动作模式(pwm脉冲)和直流母线电流及其平均值等的波形图。
[0041]
[图13]对逆变器的直流母线电流及其平均值进行表示的波形图。
[0042]
[符号说明]
[0043]sup
、s
un
、s
vp
、s
vn
、s
wp
、s
wn
:半导体开关元件
[0044]cdc
:电容器
[0045]
m:负载
[0046]
10:载波生成单元
[0047]
20:电压指令值生成单元
[0048]
30:比较单元
[0049]
40:脉冲操作单元
[0050]
50:分配单元
[0051]
60:电压指令值加工单元
具体实施方式
[0052]
下面结合附图对本发明的实施方式进行说明。需要说明的是,该实施方式是涉及如图10所示那样直流部具有电容器c
dc
的三相逆变器的实施方式。
[0053]
如前所述,本发明的目的在于,适当地对pwm脉冲的生成时机进行调整从而降低图12(b)和图13所示的直流母线电流i
dcin
的高频成分。为此,如果对直流母线电流i
dcin
使用其有效值(effective value)进行定量化,则下述公式1~3成立。
[0054]
[式1]
[0055][0056]
[式2]
[0057][0058]
[式3]
[0059][0060]
公式1~公式3中的各变量定义如下。
[0061]
ts:pwm控制中使用的载波的周期
[0062]idcinrms
(ts):i
dcin
的周期ts内的有效值(包括直流成分)
[0063]idcave
:i
dcin
的平均值(=直流成分)
[0064]
m:调制率
[0065]im
:交流输出电流的振幅
[0066]
cosφ:功率因数
[0067]icrms
:电容器c
dc
中流通的高频电流(纹波电流)的周期ts内的有效值
[0068]
公式3所示的有效值i
crms
与由以i
dcave
为基准而交替的i
dcin
的波形和i
dcave
所围成的部分(图13的阴影部分)的面积相对应。所以,在下面的说明中,对用于使该阴影部分的面积变小的手法进行说明。
[0069]
图1是用于对与后面的附记1~4相对应的实施方式进行说明的图。
[0070]
图1示出了在载波周期ts的期间,在藉由载波(三角波)比较方式而使三相的脉冲宽度的中心位置都进行了对齐的通常的pwm脉冲(图12(b)的脉冲)su、sv、及sw中的最大宽度的su的脉冲宽度内,分别原样地维持sv和sw的脉冲宽度,并采用sv和sw的正侧脉冲容纳于su的正侧脉冲宽度内的方式以所述中心位置为基准分别沿时间轴方向进行了移动的情况下的各相的脉冲s
u’(=su)、s
v’、及s
w’。
[0071]
这样,在使脉冲移动的前后,周期ts内的各相的脉冲宽度不变,所以,藉由pwm控制的原理,可维持周期ts内的各相的输出电压的平均值。
[0072]
此情况下,为了获得脉冲s
u’(=su)、s
v’、及s
w’,只要在周期ts内使电压向量按照v0→v1
→v6
→v2
→v1
→v0
的顺序进行变迁从而对各相的开关元件进行控制即可。由图11可知,上述电压向量中的v1是让iu流动的向量,v2是让-iw流动的向量,v6则是让-iv流动的向量。
[0073]
如果使包括上述v1、v2、及v6的电压向量如上所述进行变迁从而对开关元件进行控制,就可分别使脉冲sv和sw移动至s
v’和s
w’进而对生成时机进行调整。据此,可使直流母线电流i
dcin
低于图12(b)和图13中的i
dcin
,并可降低电容器c
dc
的高频电流的有效值i
crms
。
[0074]
即,通过对周期ts内的pwm脉冲的脉冲宽度进行维持,并使预定相的脉冲进行移动,可降低电容器c
dc
中流动的高频电流,并可抑制发热。
[0075]
需要说明的是,在图1所示的实施方式中,su的正侧脉冲宽度较大,所以在其脉冲宽度内以sv和sw不重叠的方式分别使它们沿时间轴方向进行移动就可获得脉冲s
v’和s
w’。然而,在su的正侧脉冲宽度较小的情况下,则存在无法在其脉冲宽度内以sv和sw不重叠的方式使它们进行移动的情况。
[0076]
但是,即使在这样的情况下,采用如下所述的方法也可降低i
dcin
甚至i
crms
。
[0077]
图2(a)是对逆变器的各相的输出电压vu、vv、及vw和电流iu、iv、及iw进行表示的波形图。这里,电压和电流为三相正弦波,电压振幅=0.3[pu],电流振幅=0.6[pu],功率因数=1。
[0078]
图2(b)示出了将图2(a)中相当于电压相位角θ为70
°
的纵线部分的各相输出电压vu、vv、及vw的电压指令值与载波进行比较的情况下的开关动作模式(su,sv,sw)、电压向量、直流母线电流i
dcin
及其平均值i
dcave
。
[0079]
在如图2(a)所示电压振幅较小的情况下,在通常的载波比较方式的pwm控制中,如图2(b)所示,可生成相互之间的脉冲宽度的差小于图12(b)的脉冲su、sv、及sw。
[0080]
在这样的情况下,如图2(c)所示,为了使sv和sw的正侧脉冲容纳于su的正侧脉冲宽度内,可对为了获得使它们分别沿时间轴进行移动后的脉冲s
v’和s
w’的电压向量进行选择,并可使其按照v0→v6
→v7
→v2
→v0
的顺序进行变迁。据此,可减小i
dcin
的振幅,并可降低与由i
dcin
和i
dcave
所围成的部分的面积相对应的高频电流的有效值i
crms
。
[0081]
接着,对考虑了功率因数的pwm脉冲的适当的调整方法进行说明。
[0082]
这里,对忽略了逆变器的损失且输出电力为正的情况(驱动负载m的动力运行(power running)时)进行说明。此情况下,直流母线电流i
dcin
的平均值i
dcave
为正。另外,如后所述,在逆变器的输出电力为负的情况下(来自负载m的再生(regeneration)动作时)、即i
dcave
为负的情况下,可与藉由符号的反转而使输出电力为正的情况同样地进行考虑。
[0083]
下面,与上述同样地对各相中的u相电压vu为最大且电压相位角θ为60
°
~120
°
的期间进行考察。
[0084]
在i
dcave
为正的情况下,为了减小电容器c
dc
中流动的高频电流i
crms
,只要对电压向量进行选择从而仅由图11的右端的列所示的8种电流中的接近i
dcave
的值来构成i
dcin
即可。换言之,只要避免输出让与i
dcave
的差较大的电流进行流动那样的电压向量即可。
[0085]
然而,为了将逆变器的输出电压维持为指令值,需要对各相电压的脉冲宽度进行维持,所以,作为一种可以考虑的调整方法,是让各相电压的脉冲的生成时机沿时间轴前后移动。下面对该方法进行具体说明。
[0086]
在图12(b)中也进行了说明,各相的上臂的开关元件s
up
、s
vp
、及s
wp
的on期间分别被定义为t
su
、t
sv
、及t
sw
。在这些期间取0~ts的范围的值。
[0087]
由图12(a)可知,在电压相位角θ为60
°
~120
°
的期间,vu为最大,另一方面,在θ=60
°
~90
°
的期间,vv为最小,在θ=90
°
~120
°
的期间,vw为最小。所以,存在与各期间相对应的如下的模式(下面称为“移动操作模式”)。
[0088]
(1)在60
°
~120
°
的全域内,t
su
比t
sv
和t
sw
长。
[0089]
(2)在60
°
~90
°
的期间,t
sv
比t
su
和t
sw
短。
[0090]
(3)在90
°
~120
°
的期间,t
sw
比t
su
和t
sv
短。
[0091]
为此,当使脉冲移动的情况下,在移动操作模式(1)中,u相正侧脉冲在其脉冲宽度内可容纳(可包含)其他两相的正侧脉冲,在移动操作模式(2)和(3)中,v相和w相的负侧脉冲宽度可分别包含其他两相的负侧脉冲。
[0092]
这里,关于负侧脉冲的包含,如图12(b)所示的载波那样,在使用一个周期的前半为下降且后半为上升的三角波的情况下,正侧脉冲如期间t
su
、t
sv
、及t
sw
那样连续存在,另一方面,负侧脉冲原则上被分割在前后,所以,将前述的被分割在前后的负侧脉冲为0(零)的期间内其他相的脉冲变为0的情形称为「包含」。
[0093]
在上述移动操作模式(1)、(2)、及(3)中,当在某一相的脉冲宽度内可包含其他两相的脉冲的情况下,如果使除了v0和v7之外的可输出的电压向量和依照各电压向量进行开关动作时的直流母线电流i
dcin
的值进行关联,则可获得表1。表1等于使图11所示的电压向量v1~v6和i
dcin
的对应关系与移动操作模式(1)、(2)、及(3)进行了关联。
[0094]
下面,将表1所示的对应关系作为「条件1」。
[0095]
[表1]
[0096][0097]
另一方面,电压相位角θ为60
°
~120
°
的期间内的各相电流iu、iv、及iw的大小关系随功率因数而变化。
[0098]
如前所述,在动力运行状态下i
dcave
为正。需要说明的是,动力运行状态是指,功率因数角φ位于-90
°
~90
°
的范围内。另外,功率因数为正和负时,都可同样地对电压和电流的大小关系进行考虑,所以,这里对功率因数角φ位于-90
°
~0
°
的范围内的情况进行说
明。
[0099]
在动力运行状态下,如果尽可能多地输出正值的i
dcin
,则会减小i
crms
。换言之,如果输出负值的i
dcin
,则i
crms
会变大,所以应回避这种情形。
[0100]
这样,将在动力运行状态下为了减小i
crms
而尽可能多地输出正值的i
dcin
作为「条件2」。
[0101]
在上述「条件1」和「条件2」的基础上,如表2那样,可对根据功率因数角φ和电压相位角θ应选择的表1的移动操作模式进行汇总。需要说明的是,关于表2的最下一行记载的图3(a)~(g),将在后面进行叙述。
[0102]
[表2]
[0103][0104]
表2中,
[0105]
「~」的意思是,就电压相位角θ而言,表示上下的值之间的值,就功率因数角φ而言,表示左右的值之间的值;
[0106]
「/」的意思是,在电压相位角θ的中途(期间),根据功率因数角φ对移动操作模式进行切换;
[0107]
「or」的意思是,其为2个移动操作模式的边界;
[0108]
「
×
」的意思是,表1中记载的哪个移动操作模式都不能被选择。
[0109]
图3(a)~(g)示出了与表2的功率因数角φ相对应的各相电压和电流与表1的移动操作模式之间的关系。
[0110]
图3(a)与图1和图2同样是功率因数角φ=0
°
即功率因数1的情况,电压和电流为同相。此情况下,在电压相位角θ为60
°
~120
°
的期间的全域内,各相的电压和电流的极性及大小关系相同,所以,只要选择与条件1相关的表1的移动操作模式(1)即可。
[0111]
图3(b)是功率因数角φ=-15
°
的情况。此情况下,在电压相位角θ为75
°
~120
°
的期间,各相的电压和电流的极性及大小关系与φ=0
°
的情况相同,另一方面,在电压相位角θ为60
°
~75
°
的期间,则不成立(不同)。即,在60
°
~75
°
的期间,仅v相电流为负,且v相电压为最小。
[0112]
所以,此情况下,通过让脉冲进行移动以使v相的负侧脉冲宽度包含其他两相的负侧脉冲,可实现表1的移动操作模式(2)。
[0113]
如果更具体地对功率因数角φ=-15
°
的情况进行说明,则在移动操作模式(2)中,因为iu、iv、及iw中的仅iv包含极性反转的电压向量v6,所以只要选择移动操作模式(2)的三个向量v1、v5、及v6,i
dcin
就一定会取正值。该状态示于图4(a)~(c)。
[0114]
图4(a)是与图3(b)相同的图。另外,图4(b)示出了基于藉由对图4(a)的电压相位
角θ’(60
°
~90
°
的值)处的各相的电压指令值和载波进行比较而得到的通常的载波比较方式的pwm脉冲(各相脉冲的中心位置进行了对齐的pwm脉冲)、电压向量、及i
dcin
、i
dcave
,图4(c)则示出了依据本实施方式使脉冲su、sv、及sw进行移动而得到的脉冲s
u’、s
v’、s
w’、电压向量、及i
dcin
、i
dcave
。
[0115]
观察图4(c)所示的脉冲s
u’、s
v’、及s
w’的相互包含关系可知,v相负侧脉冲s
v’的宽度内包含了u相和w相的负侧脉冲s
u’和s
w’,满足了前述的移动操作模式(2)的包含关系。
[0116]
返回图3,图3(c)是功率因数角φ为-30
°
的情况。作为应选择的模式,表1的移动操作模式(1)和(2)变成了各半。
[0117]
图3(d)是功率因数角φ为-45
°
的情况。此情况下,在电压相位角105
°
~120
°
的范围内,与φ=0
°
的情况同样地,可选择表1的移动操作模式(1),在60
°
~90
°
的范围内,与φ=-15
°
的情况同样地,可选择表1的移动操作模式(2),另一方面,在90
°
~105
°
的范围内,与上述条件1相关的表1的哪个模式都不能被选择。该情形在表2中由「
×
」表示。
[0118]
如果更具体地进行说明,则在电压相位角为90
°
~105
°
的范围内,就电流的极性而言,仅v相与其他相不同,但就电压而言,仅u相的极性不同,所以,无论选择表1的移动操作模式(1)~(3)中的哪一个,都无法避免i
dcin
取负值。此情况下,如果使脉冲进行移动,则存在尽管i
dcave
为正值但直流母线电流i
dcin
中也包含较大的负电流的可能性。所以,此情况下,只要不执行依据本实施方式使脉冲进行移动的操作,而是藉由基于三相正侧脉冲的重复较多且很多零向量被输出的通常的载波比较方式的pwm控制模式(如图4(b)所示,各相的正侧脉冲或负侧脉冲的中心位置进行了对齐的控制模式)进行控制即可。
[0119]
上述那样对执行基于本发明的移动操作的控制模式(后面的附记中的第2控制模式)和基于通常的载波比较方式的pwm控制模式(后面的附记中的第1控制模式)进行切换的构想相当于后面的附记5的发明。
[0120]
图3(e)~(g)是功率因数角φ为-60
°
~-90
°
的情况。「
×
」的期间随功率因数角的增大而增加,-90
°
时全域都变为「
×
」。
[0121]
即,由表2也显然可知,随功率因数角的变大,基于通常的pwm控制模式的情况增多。
[0122]
上述那样根据由逆变器输出的电压和电流的极性或大小关系对执行脉冲移动的第2控制模式和基于通常的载波比较方式的第1控制模式进行切换、具体而言根据电压和电流的极性、相位角、功率因数等对两个控制模式进行切换的构想相当于后面的附记6的发明。
[0123]
需要说明的是,作为基于表2的类推,在功率因数角φ为正的情况下,只要采用表2中的移动操作模式(3)替代移动操作模式(2)来选择电压向量即可。
[0124]
另外,根据三相逆变器的电压相位角60
°
的动作的对称性,也可与表2同样地导出电压相位角θ的其他范围内的pwm脉冲的操作方法。
[0125]
此外,在功率因数角φ变为90
°
~180
°
(-180~-90
°
)的再生状态下,i
dcave
尽管为负,但此情况下,基于只要尽可能多地输出负值的i
dcin
就可减小i
crms
这样的基本原理,并按照与动力运行状态时同样的思考方法,也可导出pwm脉冲的操作方法。
[0126]
对上面进行总结后可知,在某一载波周期ts内,就三相交流电流中的唯一的极性不同的相而言,在将该相的电压与其他相的电压进行比较时该相的电压为最大或最小的情
况下,当为了在该相的pwm脉冲的脉冲宽度内尽可能地包含其他两相的pwm脉冲而使用沿时间轴移动了的pwm脉冲对开关元件进行控制以使该相的电压不为最大也不为最小时,并不执行上述移动操作,而是使用基于通常的载波比较方式而得到的三相的pwm脉冲对开关元件进行控制。
[0127]
这里,上述的该相的pwm脉冲和其他两相的pwm脉冲的包含关系也可不是严密的包含关系。例如,图2(c)中,移动后的脉冲s
v’和s
w’完全包含在了脉冲s
u’的脉冲宽度内,但即使在类似脉冲s
w’从脉冲s
u’的左端露出了一点或脉冲s
v’从脉冲s
u’的右端露出了一点的情况(即,s
u’的脉冲宽度内并不是严密地包含了脉冲s
v’或s
w’的情况)下,也可获得本发明的效果。
[0128]
此外,上述的该相的pwm脉冲的脉冲宽度内包含的其他两相的pwm脉冲之间的时间轴上的重复范围也不一定必须最短,这也适用于pwm脉冲的正侧脉冲或负侧脉冲。
[0129]
例如,图2(c)中,即使假设脉冲s
w’的左端以从脉冲s
u’的左端留有一些空余(margin)的方式位于右侧,并且脉冲s
v’的右端以从脉冲s
u’的右端留有一些空余的方式位于左侧,导致脉冲s
v’和s
w’在时间轴上的重复范围并非最短,也可获得本发明的效果。
[0130]
需要说明的是,也可不是很严密地进行表2中示为「/」的切换,换言之,即使进行切换的电压相位角θ和/或功率因数角φ存在一些偏差,从整体上来说也可降低i
crms
。
[0131]
这里,图9是本实施方式中用于生成预定的pwm脉冲的控制装置的功能框图。图9所示的控制装置的各功能可藉由通用微机中的硬件和安装在该硬件上的软件来实现。
[0132]
图9(a)是如至此说明的那样在一个载波周期内使预定的pwm脉冲进行移动的情况的功能框图。该图中,10是用于基于载波频率fc生成载波(三角波)的载波生成单元,20是用于输入逆变器的各相的电压
·
电流检测值从而生成电压指令值vu、vv、及vw的电压指令值生成单元,30是用于对载波和电压指令值vu、vv、及vw进行比较并藉由载波比较方式来生成通常的pwm脉冲su、sv、及sw的比较单元。
[0133]
另外,40是脉冲操作单元。该脉冲操作单元40可基于电压相位角θ、功率因数角φ等执行本实施方式的移动操作从而获得脉冲s
u’、s
v’、及s
w’,还可对从比较单元30输入的通常的pwm脉冲su、sv、及sw和所述脉冲s
u’、s
v’、及s
w’这二者之一进行选择并进行输出。再有,50是用于根据所输入的pwm脉冲来生成相对于逆变器的各开关元件的驱动脉冲并进行分配的分配单元。
[0134]
此外,在作为载波而使用三角波的情况下,也可通过如下方法实现pwm脉冲的移动操作。图9(b)所示的功能框图使用于如下所述使电压指令值呈阶梯状变化的情况。
[0135]
图5是u相的正侧脉冲宽度为最大且其正侧脉冲宽度内包含v相和w相的正侧脉冲的情况的波形图,图5(a)是基于通常的三角波比较方式的情况的波形图,图5(b)是在一个载波周期内使电压指令值发生变化从而让pwm脉冲进行了移动的情况的波形图。
[0136]
图5(b)中,如后面的附记7所述,使各相的电压指令值为三角波的一个周期中的预定期间内的输出电压大于等于一个周期内应输出的目标电压的时间平均值且一个周期中的剩余期间内的输出电压小于目标电压的时间平均值的电压指令值,并使一个周期中的各相的电压指令值等于各自的目标电压的时间平均值。即,在一个周期内的各相的电压指令值等于各自的目标电压的时间平均值的三角波的上升和下降处使电压指令值呈阶梯状变化,并使其平均值等于变化前的值,由此可在对周期ts内的各相的脉冲宽度进行原样维持
的同时,获得使生成时机分别移动了的脉冲s
u’、s
v’、及s
w’。
[0137]
需要说明的是,图5(b)中,v
up
~v
wn
是各相的每个半周期的电压指令值,图9(b)的电压指令值加工单元60可根据电压相位角θ和功率因数φ按照载波周期ts的每个半周期对电压指令值vu、vv、及vw进行加工(增减)从而生成v
up
~v
wn
,比较单元30可将这些v
up
~v
wn
分别与三角波进行比较从而生成脉冲s
u’、s
v’、及s
w’。需要说明的是,在采用不使电压指令值呈阶梯状变化的图5(a)的通常的三角波比较方式的情况下,电压指令值加工单元60可原样地输出所输入的vu、vv、及vw,比较单元30可将这些vu、vv、及vw分别与三角波进行比较从而生成脉冲su、sv、及sw。
[0138]
图5(a)和(b)示出了仅iu为正而iv(=-(iu+iw))和iw(=-(iu+iv))为负的情况,图5(b)的i
dcin
是与图5(a)的i
dcin
相比在较宽的范围内为正的值。
[0139]
对图5(a)和(b)进行比较可知,通过使脉冲进行移动,阴影部分的面积减少了,并且i
crms
也下降了。
[0140]
另一方面,图6是v相的负侧脉冲宽度为最大的情况的例子,并且是其负侧脉冲宽度内包含u相和w相的负侧脉冲的情况的波形图,图6(a)是基于通常的三角波比较方式的情况的波形图,图6(b)是使电压指令值呈阶梯状变化从而让pwm脉冲进行了移动的情况的波形图。
[0141]
图6(a)和(b)示出了仅iv(=-(iu+iw))为负而iu和iw为正的情况,此情况下,图6(b)的i
dcin
也是与图6(a)的i
dcin
相比在较宽的范围内为正的值。
[0142]
对上述图6(a)和(b)进行比较也可知,通过使脉冲进行移动,阴影部分的面积减少了,并且i
crms
也下降了。
[0143]
需要说明的是,图6(b)中,在波形的右端部分,u相电压的负侧脉冲和w相电压的负侧脉冲进行了重复。这是在作为载波使用前半下降且后半上升的三角波的pwm控制中在三角波的上升和下降处使电压指令值呈阶梯状变化的情况下所发生的特征。即,此情况下,即使让负侧脉冲宽度为最大的脉冲(图6(b)中的v相脉冲)的脉冲宽度内包含其他两相的负侧脉冲,也存在该其他两相的负侧脉冲不得不重复的情形,所以,此时为了使该其他两相的负侧脉冲的重复范围尽可能地变小,只要让电压指令值呈阶梯状变化即可。
[0144]
具体地,只要执行如下操作即可,即:就负侧脉冲而言,使负侧脉冲宽度为最大的相和负侧脉冲宽度为第二大的相的两者之间的脉冲的上升或下降对齐,并让脉冲进行移动以使对齐了的点最大限度地接近三角波的一个周期的中心,而就剩余的一相即负侧脉冲宽度为最小的相的脉冲而言,沿与上述移动方向相反的方向,在使其包含于最大的负侧脉冲宽度的范围内,最大限度地让其进行移动。
[0145]
另外,尽管并未图示,但在使用前半为上升且后半为下降的三角波来进行三角波比较方式的pwm控制的情况下,只要采用同样的方法对正侧脉冲进行移动即可。
[0146]
需要说明的是,如上所述,不改变电压指令值地在周期ts内相对于大致一定的电压指令值进行三角波比较只是通常的三角波比较方式。所以,如图5(b)和图6(b)所示,藉由使电压指令值呈阶梯状变化或不使其呈阶梯状变化,可简单地进行使脉冲进行移动的第2控制模式和基于通常的三角波比较方式的第1控制模式之间的切换。
[0147]
此外,图7与后面的附记8和附记9的发明相对应,是用于说明对脉冲操作的各种模式进行切换时的冲击的抑制方法的图。
[0148]
如上所述,脉冲操作的各种模式可根据电压相位角和功率因数进行切换。进行模式切换时,pwm脉冲一旦发生骤变则电流也会发生骤变,为此,存在这种骤变会对负载产生不良影响的情况。例如,在负载为电动机的情况下,会发生转矩(torque)波动,在负载的部分连接了电源的情况下,会发生电源紊乱。这里,对避免发生这些问题的方法进行说明。
[0149]
就模式切换而言,存在两种模式切换,一种是与每个电压相位角60
°
的反复动作相对应的「模式切换a」,另一种是在该60
°
的期间内所生成的「模式切换b」(基于图3所说明的移动操作模式(1)、(2)、或「
×
」之间的切换)。
[0150]
首先,对「模式切换b」进行说明。
[0151]
图7示出了从图3(b)或图3(c)所示的移动操作模式(2)至(1)的切换、即进行脉冲移动的模式之间的切换的情形。图7(a)是与图3(b)同样地在功率因数角φ为-15
°
的情况下的电压和电流的波形图,图7(b)和(c)分别示出了移动操作模式(2)和移动操作模式(1)、即切换时机之前(马上要进行切换时)和之后(刚刚结束切换时)的脉冲的情形。
[0152]
对图7(b)和(c)进行比较可知,进行脉冲操作前的脉冲(su,sv,sw)当然极其相似,另外,图7(b)和(c)之间的很大的区别在于,移动后的v相脉冲s
v’的位置从三角波的前半移动到了后半。另一方面,u相脉冲s
u’的位置仅向前方移动了一点,w相脉冲s
w’的位置则基本相同。
[0153]
这样,只要对脉冲进行操作以使正侧脉冲宽度为最小的v相脉冲s
v’的生成时机在切换的前后进行变更(改变),就可将切换前后的脉冲的状态的变化抑制得很小。而且,脉冲的位置的变化是在三角波的一个周期的中央处发生的,所以切换前后的脉冲的变化大概在三角波的一个周期之后才会发生,例如,与相邻的三角波的一个周期的切换前后附近发生变化的情况相比,冲击较小。
[0154]
这样地使正侧脉冲宽度为最小的相的脉冲的生成时机在切换前后进行变更相当于后面的附记8的发明。
[0155]
作为藉由模式切换b所能获得的可能性,如图7(d)所示,藉由使正侧脉冲宽度位于最大和最小之间的w相的脉冲位置从图7(b)的状态开始相对于三角波的一个周期的中心沿逆方向(相反方向)进行变化,也可获得w相脉冲s
w’。
[0156]
此情况下,在切换的前后,u相脉冲s
u’和v相脉冲s
v’的位置不变,所以只要在切换的前后仅针对一相进行脉冲的位置的改变即可,冲击也较小。
[0157]
这样地使正侧脉冲宽度位于最大和最小之间的相的脉冲的生成时机在切换的前后进行变更相当于后面的附记9的发明。
[0158]
另外,图8示出了图3(d)~(f)所示的移动操作模式(1)或移动操作(2)与「
×
」之间的切换、即进行脉冲操作的模式和不进行脉冲操作的模式之间的切换的情形。图8(a)是与图3(d)同样地在功率因数角φ为-45
°
的情况下的电压和电流的波形图,图8(b)和(c)分别示出了从移动操作模式(2)至「
×
」和从「
×
」至移动操作模式(1)的切换时机的脉冲的情形。需要说明的是,在「
×
」的情况下,不进行脉冲的切换,所以采用该图中的变更前的脉冲。
[0159]
首先,如果对图8(b)进行说明,则移动操作模式(2)中,具有最大的正侧脉冲宽度的u相以外的相(v相和w相)的脉冲sv和sw基本上进行了重叠,在模式的切换中,它们会移动至三角波的一个周期的前方,变为s
v’和s
w’,所以即使不进行特别的操作,切换前后的三角波的一个周期内也不会发生陡峭的变化。
[0160]
另一方面,如果对图8(c)进行说明,则就位于三角波的一个周期的中央处的上述两相(v相和w相)的脉冲sv和sw而言,切换后,被分割配置在三角波的上升和下降处,从而变成s
v’和s
w’。此时,为了对切换前后的三角波的一个周期内的陡峭的变化进行一定程度的抑制,只要以正侧脉冲宽度较短的脉冲、即s
w’先发生的方式进行配置即可。
[0161]
藉由进行如上所述的操作,可对在电压相位角60
°
的范围内发生模式切换的情况下的冲击进行缓和,进而可实现平稳的动作。
[0162]
另外,就上述的与每个电压相位角60
°
的反复动作相对应的「模式切换a」而言,通过适当地采用针对「模式切换b」所说明的方法,也可对切换冲击进行缓和。
[0163]
例如,在至此说明的电压相位角60
°
~120
°
之前的60
°
的期间内,v相电压vv的极性唯一为负,v相电压vv的振幅为最大。
[0164]
上述连续两个60
°
期间的切换中的图3所示的各功率因数的状况如下。
[0165]
功率因数角0
°
:与移动操作模式(2)移动操作模式(1)的切换相同
[0166]
功率因数角0
°
~-60
°
:移动操作模式(2)的连续(无切换)
[0167]
功率因数角-60
°
:与「
×
」移动操作模式(2)的切换相同
[0168]
功率因数角-60
°
~-90
°
:「
×
」的连续(无切换)
[0169]
如上所述,即使在「模式切换a」中,通过适当地应用针对「模式切换b」所说明的方法,也可对切换时的冲击进行缓和。
[0170]
基于上述,还公开了如下附记。
[0171]
[附记1]一种三相逆变器,其为三个由两个半导体开关元件进行了串联的串联电路相对于与直流电压源并联的电容器相互并联、将所述两个半导体开关元件之间的连接点作为各相的交流输出端子、并按照每个预定的开关动作周期根据各相的pwm脉冲对所述半导体开关元件进行控制的三相逆变器,其特征在于,生成一个开关动作周期中的三相的pwm脉冲,所述三相的pwm脉冲包括三相的pwm脉冲中的除了正侧脉冲的脉冲宽度为最大的相之外的其他两相的pwm脉冲,所述其他两相的正侧脉冲的相互位置关系是,与一相的正侧脉冲包含了另一相的正侧脉冲的状态相比,时间轴上的重复范围较少的位置关系。
[0172]
[附记2]如附记1记载的三相逆变器,其特征在于,所述脉冲宽度为最大的相的正侧脉冲包含所述其他两相的正侧脉冲。
[0173]
[附记3]一种三相逆变器,其为三个由两个半导体开关元件进行了串联的串联电路相对于与直流电压源并联的电容器相互并联、将所述两个半导体开关元件之间的连接点作为各相的交流输出端子、并按照每个预定的开关动作周期根据各相的pwm脉冲对所述半导体开关元件进行控制的三相逆变器,其特征在于,生成一个开关动作周期中的三相的pwm脉冲,所述三相的pwm脉冲包括三相的pwm脉冲中的除了负侧脉冲的脉冲宽度为最大的相之外的其他两相的pwm脉冲,所述其他两相的负侧脉冲的相互位置关系是,与一相的负侧脉冲包含了另一相的负侧脉冲的状态相比,时间轴上的重复范围较少的位置关系。
[0174]
[附记4]如附记3记载的三相逆变器,其特征在于,所述脉冲宽度为最大的相的负侧脉冲包括所述其他两相的负侧脉冲。
[0175]
[附记5]一种三相逆变器,其特征在于,可对第1控制模式和第2控制模式进行切换,
[0176]
所述第1控制模式使用一个开关动作周期内的、包括三相的pwm脉冲中的除了正侧
脉冲的脉冲宽度为最大的相之外的其他两相的正侧脉冲的相互位置关系为一相的正侧脉冲包含了另一相的正侧脉冲的状态的所述其他两相的pwm脉冲的三相的pwm脉冲、及、一个开关动作周期内的、包括三相的pwm脉冲中的除了负侧脉冲的脉冲宽度为最大的相之外的其他两相的负侧脉冲的相互位置关系为一相的负侧脉冲包含了另一相的负侧脉冲的状态的所述其他两相的pwm脉冲的三相的pwm脉冲中的任意一个三相的pwm脉冲,
[0177]
所述第2控制模式执行使用由附记1生成的三相的pwm脉冲的模式、使用由附记2生成的三相的pwm脉冲的模式、使用由附记3生成的三相的pwm脉冲的模式、及使用由附记4生成的三相的pwm脉冲的模式中的任意一个模式。
[0178]
[附记6]如附记5记载的三相逆变器,其特征在于,根据由所述三相逆变器输出的电压和电流的极性或大小关系对所述第1控制模式和所述第2控制模式进行切换。
[0179]
[附记7]如附记1~6中的任一项记载的三相逆变器,其特征在于,分别对各相的电压指令值和作为载波的三角波进行比较从而生成三相的pwm脉冲,
[0180]
各相的电压指令值是所述三角波的一个周期中的预定期间内的输出电压大于等于所述一个周期内应输出的目标电压的时间平均值、且所述一个周期中的剩余期间内的输出电压小于所述目标电压的时间平均值的电压指令值,
[0181]
所述一个周期中的各相的电压指令值等于各自的目标电压的时间平均值。
[0182]
[附记8]一种三相逆变器,其特征在于,可对使用由附记1或附记2生成的三相的pwm脉冲的模式和使用由附记3或附记4生成的三相的pwm脉冲的模式进行切换,当切换这些模式时,对正侧脉冲宽度为最小的相的pwm脉冲的生成时机在切换前后进行变更。
[0183]
[附记9]一种三相逆变器,其特征在于,可对使用由附记1或附记2生成的三相的pwm脉冲的模式和使用由附记3或附记4生成的三相的pwm脉冲的模式进行切换,当切换这些模式时,对正侧脉冲宽度位于最大和最小之间的相的pwm脉冲的生成时机在切换前后进行变更。
[0184]
以上对本发明的例示的实施方式进行了说明,但本发明并不限定于具体公开的实施方式,只要不脱离附记书记载的范围,还可对其进行各种各样的变形和/或变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1