驱动控制器及其控制方法、装置、可读存储介质和机器人与流程
本发明涉及控制,具体而言,涉及一种驱动控制器及其控制方法、装置、可读存储介质和机器人。
背景技术:
1、现有的驱动控制器可以通过导线向负载供电,在供电的过程,若负载出现变化,则导线上的电流也会发生变化。
2、在导线上的电流发生变化的情况下,供电在导线上的电压降也会发生变化,在驱动控制器输出的供电不变的情况下,负载端接收到的电压会随着负载的变化而变化,上述变化会使得负载出现供电不足的情况,极易造成负载的控制出现错乱。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本发明的第一个方面在于,提供了一种驱动控制器。
3、本发明的第二个方面在于,提供了一种控制方法。
4、本发明的第三个方面在于,提供了一种控制装置。
5、本发明的第四个方面在于,提供了一种控制装置。
6、本发明的第五个方面在于,提供了一种可读存储介质。
7、本发明的第六个方面在于,提供了一种机器人。
8、本发明的第七个方面在于,提供了一种机器人。
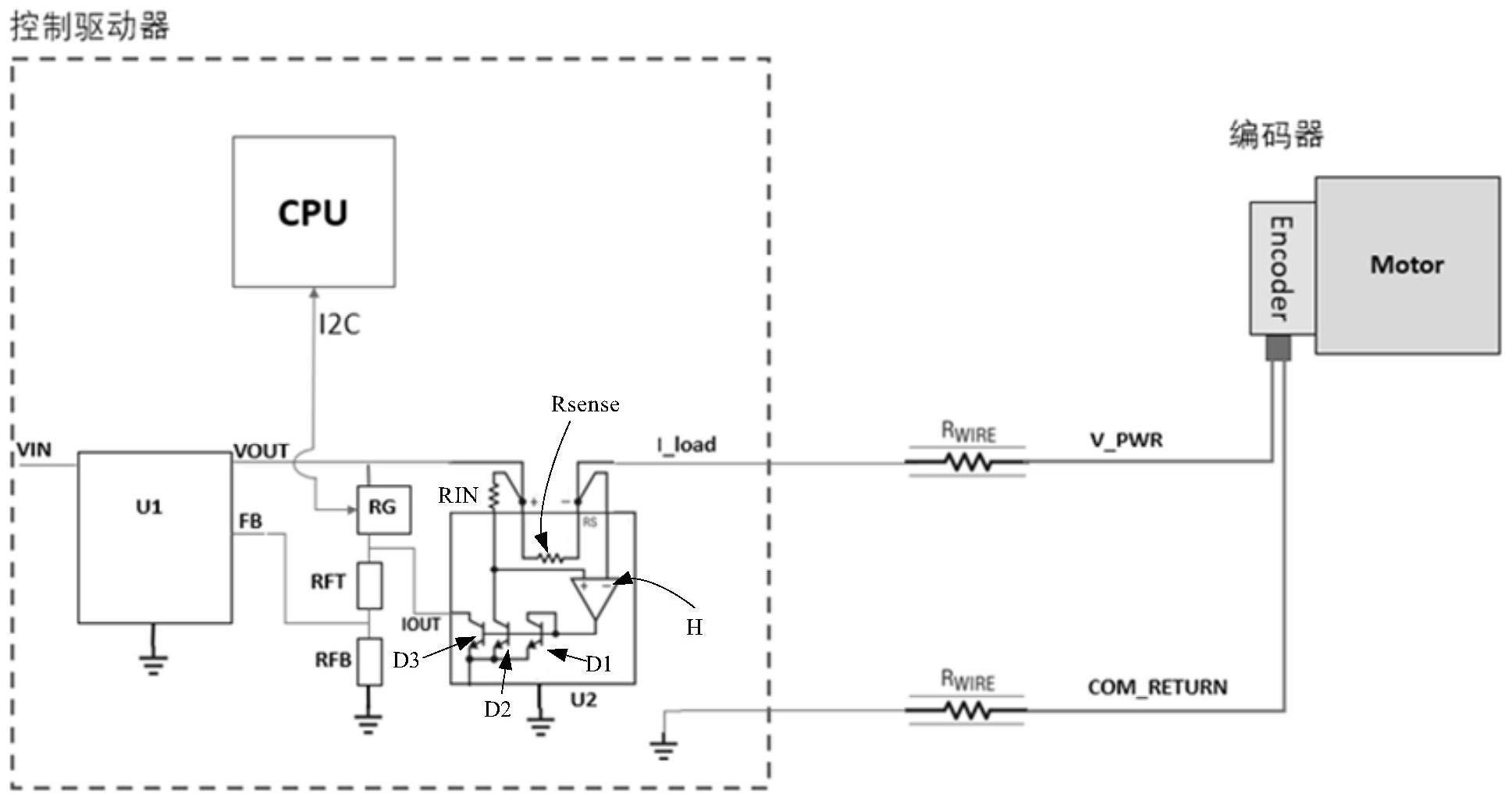
9、有鉴于此,根据本发明的第一个方面,本发明提供了一种驱动控制器,包括:电压调节器,具有输出端和输入端,输出端通过导线输出供电;反馈补偿器,设于导线上,反馈补偿器具有第一端脚和第二端脚,其中,第一端脚接地;第一电阻电路,第一电阻电路的第一端与导线连接,第一电阻电路的第二端与第二端脚连接,用于确定输出端输出供电在导线上的电压降;第二电阻电路,第二电阻电路的第一端与第一电阻电路的第二端连接,第二电阻电路的第二端与输入端连接;第三电阻电路,第三电阻电路的第一端与第二电阻电路的第二端连接,第三电阻电路的第二端接地,其中,第二电阻电路和第三电阻电路用于确定在电压降下,输入端输入的电压信号。
10、本技术提出了一种驱动控制器,在该驱动控制器中,利用设置的反馈补偿器、第一电阻电路、第二电阻电路以及第三电阻电路来检测电压调节器通过导线向外供电时,在导线上的电压降,并将该电压降反馈到电压调节器上,以供电压调节器根据输入端输入的电压信号来调整输出端的电压值,从而动态调整输出端输出的电压值,来保证驱动控制器通过导线向外供电时,负载处所接收到的供电电压符合负载的供电需求,从而降低负载因接收到的电压无法满足其供电需求,进而出现通信和/或控制异常这一情况的出现。
11、采用上述方案,可以动态调整输出端输出的电压值,避免了直接增加输出端输出的电压值造成负载所接收到的供电电压过高,负载因供电过高而损坏,同时,也能提高负载运行的稳定性。
12、在其中一个技术方案中,若采集负载端的供电电压,并根据负载的供电电压来调整输出端的电压值,则需要在到现有导线的基础上,额外增加线缆以及与线缆配合使用的kelvin电阻,而上述方案,无疑会增加成本,同时,也会增加空间的布线难度,在实际使用过程中,容易发生线缆开路和短路故障,影响运行的稳定性。而在本技术的技术方案中,反馈补偿器、第一电阻电路、第二电阻电路以及第三电阻电路的配合使用,可以采集导线上的电流,并将采集的电流加载到第一电阻电路上,来提高电压调节器的输出端输出的电压值。在上述过程中,输出端输出的电压值的调高程度与电流变化在导线上的电压降相同,两者可以相互抵消,因此,负载端所接收到的电压值可以始终保持在一个恒定的状态,因此,可以为负载提供稳定的供电,确保其稳定运行。
13、在上述技术方案中,由于采集导线上的电流,并将采集的电流加载到第一电阻电路上,来提高电压调节器的输出端输出的电压值。因此,本技术提出的驱动控制器的动态负载响应比较好,负载如果发生从轻载到重载的跳变,驱动控制器也能够进行快速响应,输出快速调整,不会出现输出电压剧烈跳变,振动等动态响应问题。
14、在其中一个技术方案中,第一电阻电路包括一个反馈补偿电阻,可以理解的是,第一电阻电路包括一个或多个电阻。
15、在其中一个技术方案中,第一电阻电路所包含的一个或多个电阻与导线的阻值相关,可以理解的是,导线的阻值指的是,自驱动控制器到负载之间的导线的阻值。
16、在其中一个技术方案中,第二电阻电路可以是一个或多个电阻组成的反馈电阻网络,同样的,第三电阻电路可以是一个或多个电阻组成的反馈电阻网络。
17、在其中一个技术方案中,电压调节器可以理解为,能够根据检测的结果动态输出供电的器件,其可以理解为,从驱动端给负载远端供电的调节器,其中,驱动端即本技术中的输出端。
18、在其中一个技术方案中,反馈补偿器可以理解为,检测导线上的电流,并将电流值反馈到第一电阻电路,以供电压调节器调节输出端的电压值。
19、在其中一个技术方案中,驱动控制器可以是一个控制器中的一个电路板卡如控制板,驱动板或安全板,或是采用编码器的伺服系统中的一个编码器信号接受板卡。
20、另外,本技术提出的驱动控制器还具有以下附加技术特征。
21、在上述技术方案中,反馈补偿器包括:第一电阻;电流监测芯片,电流监测芯片包括:第二电阻,串接在导线上,其中,第二电阻的第一端与第一电阻的第一端连接;运算放大器;运算放大器的第一端与第一电阻的第二端连接,运算放大器的第二端与第二电阻的第二端连接;第一三极管,第一三极管的第一端和控制端与运算放大器的输出端连接;第二三极管,第二三极管的第一端与运算放大器的第一端连接;第三三极管,第三三极管的第一端为第二端脚,第二三极管的控制端与第三三极管的控制端与第一三极管的控制端连接,第一三极管的第二端、第二三极管的第二端、第三三极管的第二端连接后形成第一端脚。
22、在该技术方案中,具体给出了反馈补偿器的具体组成结构,具体地,通过设置第一电阻,以便利用第一电阻来对进行配置,以便调整电流监测芯片上的电流,使其被配置在10ua到1ma之间,使得第二端脚处的电流值处于10ua到1ma之间,以便保证电流监测芯片的稳定运行。
23、其中,电流监测芯片中设置一个第二电阻,以便利用该第二电阻来感知导线上的电流的动态变化,其中,第二电阻上的电压可以通过以下公式表达:
24、vsense=rsense×i_load 公式1;
25、其中,vsense为第二电阻两端的电压,rsense为第二电阻的阻值,i_load为导线上的电流。
26、作为电流监测芯片,第二端脚处的电流和第二电阻两端的电压呈正比关系,具体的,公式如下:
27、
28、其中,rin是第一电阻,可以理解为反馈补偿器sink电流产生外置固定电阻。
29、iiout是第二端脚处的电流,vsense为第二电阻两端的电压。
30、结合上述采集导线上的电流,并将采集的电流加载到第一电阻电路上,来提高电压调节器的输出端输出的电压值可知:
31、iiout×rg=vout_δ=vdrop 公式3;
32、其中,rg为第一电阻电路的阻值,vout_δ是电流iiout在rg上产生增加的电压,这个电压直接叠加在输出电压上,从而使得负载端接受的电压维持不变。
33、其中,vdrop=i_load×(rwire+rsense) 公式4;
34、其中,rwire是导线的电阻,vdrop是传输线缆上形成的压降,也即负载电流i_load在传输线缆电阻rwire上形成的电压降。
35、在该技术方案中,利用第二端脚吸入与导线上的电流大小呈比例的电流,以便在第一电阻电路的作用下,确定在电压调节器的输出端向负载供电时,在第一电阻电路上的电压降,利用第二电阻电路和第三电阻电路的组合使用,将第一电阻电路上的电压降以电压信号的形式输入到电压调节器,以便电压调节器根据电压信号来调整输出端的电压值。
36、在上述任一技术方案中,电压调节器还具有供电引脚,供电引脚用于接收供电信号。
37、在该技术方案中,通过设置供电引脚,以便利用供电引脚想电压调节器提供电能,从而通过电压调节器的输出端向负载供电。
38、在上述任一技术方案中,还包括:控制器,与第一电阻电路,用于设置第一电阻电路的阻值。
39、在该技术方案中,通过设置控制器,以便可以根据实际使用需要动态调整第一电阻电路的阻值,以便使得第一电阻电路的阻值与当前导线相适配,确保负载供电的稳定性。
40、在其中一个技术方案中,控制器根据线缆参数来进行设置第一电阻电路的阻值。
41、在其中一个技术方案中,控制器可以是上位机,其中,上位机运行存储的程序或指令,根据线缆参数来确定第一电阻电路的阻值,具体地,上位机可以是计算机,或手持设备,或手持示教器,或手机等。
42、在其中一个技术方案中,控制器在设置第一电阻电路的阻值时,可以将负载替换为阻值固定的阻性负载,如编码器可以是工作在一个稳定的负载工况的编码器。
43、在控制器运行程序或指令时,用户将线缆参数填入上位机校准软件,上位机完成线缆阻抗的计算,然后将线缆阻抗参数通过某种通信介质传输给驱动控制器的处理器,驱动控制器的处理器收到参数后进行计算第一电阻电路的调整阻值,计算完成后,将第一电阻电路的阻值通过i2c总线对第一电阻电路进行调整。
44、在上述任一技术方案中,第一电阻电路包括可调电阻或数字电位器。
45、在该技术方案中,具体限定了第一电阻电路的可能选取方案,在选取可调电阻的情况下,可以根据导线的实际线长、线径以及线缆材质中的一种或多种来调整可调电阻的阻值,以便满足不同长度、不同线径、不同线缆材质的导线的使用需求。
46、其中,数字电位器(digital potentiometer)亦称数控可编程电阻器,是一种代替传统机械电位器(模拟电位器)的新型cmos数字、模拟混合信号处理的集成电路。
47、根据本发明的第二个方面,本发明提供了一种控制方法,用于如第一方面中的驱动控制器,包括:获取输入端输入的电压信号;确定电压信号对应的电压值;根据电压信号对应的电压值与预设电压区间的比较结果,调整输出端输出的电压值。
48、本技术提出了一种控制方法,通过运行该控制方法,可以实现根据导线上的电流的动态变化而动态调整电压调节器的输出端的输出电压值,以便确保与驱动控制器连接的负载的供电能够维持在预设电压区间内。
49、在此过程中,可以确保负载的稳定供电,减少了负载的变化对负载供电的影响,从而降低负载因接收到的电压无法满足其供电需求,进而出现通信和/或控制异常这一情况的出现。
50、采用上述方案,可以动态调整输出端输出的电压值,避免了直接增加输出端输出的电压值造成负载所接收到的供电电压过高,使得负载因供电过高而损坏,同时,也能提高负载运行的稳定性。
51、在其中一个技术方案中,若采集负载端的供电电压,并根据负载的供电电压来调整输出端的电压值,则需要在到现有导线的基础上,额外增加线缆以及与线缆配合使用的kelvin电阻,而上述方案,无疑会增加成本,同时,也会增加空间的布线难度,在实际使用过程中,容易发生线缆开路和短路故障,影响运行的稳定性。
52、在其中一个技术方案中,预先构建电压信号与电压信号对应的电压值之间的对应关系,以便在获取到电压信号的情况下,可以根据该对应关系,确定电压信号对应的电压值,以便将该电压值与预设电压区间进行比较,从而根据比较结果动态调整输出端的电压值,以便确保负载的稳定供电,减少了负载的变化对负载供电的影响,从而降低负载因接收到的电压无法满足其供电需求,进而出现通信和/或控制异常这一情况的出现。
53、在其中一个技术方案中,预设电压区间为与驱动控制器通过导线连接的负载的供电电压。
54、在其中一个技术方案中,预设电压区间根据负载的不同而不同,可以通过负载的铭牌来确定,其取值在此不再赘述。
55、另外,本技术提出的控制方法还具有以下附加技术特征。
56、在上述技术方案中,根据电压信号对应的电压值与预设电压区间的比较结果,调整输出端输出的电压值,包括:基于电压信号对应的电压值小于预设电压区间中的下限值,增大输出端输出的电压值;基于电压信号对应的电压值大于预设电压区间中的上限值,减小输出端输出的电压值;基于电压信号对应的电压值处于预设电压区间,维持输出端输出的电压值不变。
57、在该技术方案中,具体给出了根据电压信号对应的电压值和预设电压区间的比较结果调整输出端的电压值的具体方案,通过增大或减小输出端输出的电压值,以便使得输出端输出的电压值趋于稳定,减少了输出的电压值的波动对负载的影响。
58、在上述任一技术方案中,还包括:接收导线的线缆参数;确定与线缆参数对应的第一电阻电路的目标阻值;调整第一电阻电路的阻值至目标阻值。
59、在该技术方案中,考虑到在更换导线的情况下,导线上的阻值也会发生变化,为了消除更换导线对负载供电的影响,根据公式3、公式4和公式5可以得到公式6,其中,公式5的表达如下:
60、
61、其中,公式6的表达如下:
62、
63、其中,公式(6)表达了第一电阻电路的阻值rg和线缆压降电阻rwire,第一电阻rin,第二电阻rsense之间的关系,其中rin和rsense是固定选取的电阻,从而可以知道第一电阻电路的阻值rg阻和线缆电阻rwire之间存在公式(6)线性关系,当rwire变化时只需要调整第一电阻电路的电阻rg即可实现快速补偿。
64、通过将第一电阻电路的阻值调整到目标阻值,以便使得第一电阻电路的阻值与当前的导线相适配,减少两者不匹配造成负载供电不稳定这一情况的出现。
65、在上述任一技术方案中,线缆参数包括:线长、线径、线缆材质中的一种或多种。
66、根据本发明的第三个方面,本发明提供了一种控制装置,用于如第一方面中的驱动控制器,包括:获取单元,用于获取输入端输入的电压信号;确定单元,用于确定电压信号对应的电压值;调整单元,用于根据电压信号对应的电压值与预设电压区间的比较结果,调整输出端输出的电压值。
67、本技术提出了一种控制装置,在该控制装置中,可以实现根据导线上的电流的动态变化而动态调整电压调节器的输出端的输出电压值,以便确保与驱动控制器连接的负载的供电能够维持在预设电压区间内。
68、在此过程中,可以确保负载的稳定供电,减少了负载的变化对负载供电的影响,从而降低负载因接收到的电压无法满足其供电需求,进而出现通信和/或控制异常这一情况的出现。
69、采用上述方案,可以动态调整输出端输出的电压值,避免了直接增加输出端输出的电压值造成负载所接收到的供电电压过高,使得负载因供电过高而损坏,同时,也能提高负载运行的稳定性。
70、在其中一个技术方案中,若采集负载端的供电电压,并根据负载的供电电压来调整输出端的电压值,则需要在到现有导线的基础上,额外增加线缆以及与线缆配合使用的kelvin电阻,而上述方案,无疑会增加成本,同时,也会增加空间的布线难度,在实际使用过程中,容易发生线缆开路和短路故障,影响运行的稳定性。
71、在其中一个技术方案中,预先构建电压信号与电压信号对应的电压值之间的对应关系,以便在获取到电压信号的情况下,可以根据该对应关系,确定电压信号对应的电压值,以便将该电压值与预设电压区间进行比较,从而根据比较结果动态调整输出端的电压值,以便确保负载的稳定供电,减少了负载的变化对负载供电的影响,从而降低负载因接收到的电压无法满足其供电需求,进而出现通信和/或控制异常这一情况的出现。
72、在其中一个技术方案中,预设电压区间为与驱动控制器通过导线连接的负载的供电电压。
73、在其中一个技术方案中,预设电压区间根据负载的不同而不同,可以通过负载的铭牌来确定,其取值在此不再赘述。
74、另外,本技术提出的控制装置还具有以下附加技术特征。
75、在上述技术方案中,调整单元,具体用于:基于电压信号对应的电压值小于预设电压区间中的下限值,增大输出端输出的电压值;基于电压信号对应的电压值大于预设电压区间中的上限值,减小输出端输出的电压值;基于电压信号对应的电压值处于预设电压区间,维持输出端输出的电压值不变。
76、在该技术方案中,具体给出了根据电压信号对应的电压值和预设电压区间的比较结果调整输出端的电压值的具体方案,通过增大或减小输出端输出的电压值,以便使得输出端输出的电压值趋于稳定,减少了输出的电压值的波动对负载的影响。
77、在上述任一技术方案中,调整单元,还用于:接收导线的线缆参数;确定与线缆参数对应的第一电阻电路的目标阻值;调整第一电阻电路的阻值至目标阻值。
78、在该技术方案中,考虑到在更换导线的情况下,导线上的阻值也会发生变化,为了消除更换导线对负载供电的影响,根据公式3、公式4和公式5可以得到公式6,其中,公式5的表达如下:
79、
80、其中,公式6的表达如下:
81、
82、其中,公式6表达了第一电阻电路的阻值rg和线缆压降电阻rwire,第一电阻rin,第二电阻rsense之间的关系,其中rin和rsense是固定选取的电阻,从而可以知道第一电阻电路的阻值rg阻和线缆电阻rwire之间存在公式6的线性关系,当rwire变化时只需要调整第一电阻电路的电阻rg即可实现快速补偿。
83、通过将第一电阻电路的阻值调整到目标阻值,以便使得第一电阻电路的阻值与当前的导线相适配,减少两者不匹配造成负载供电不稳定这一情况的出现。
84、在上述任一技术方案中,线缆参数包括:线长、线径、线缆材质中的一种或多种。
85、根据本发明的第四个方面,本发明提供了一种控制装置,制器和存储器,其中,存储器中存储有程序或指令,控制器在执行存储器中的程序或指令时实现如第二方面中任一项方法的步骤。
86、根据本发明的第五个方面,本发明提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如第二方面中任一项方法的步骤。
87、根据本发明的第六个方面,本发明提供了一种机器人,包括:如第三方面或第四方面的控制装置;和/或如第五方面的可读存储介质。
88、根据本发明的第七个方面,本发明提供了一种机器人,包括:如第一方面中任一项的驱动控制器。
89、在上述技术方案中,还包括:编码器,编码器与驱动控制器之间通过导线连接。
90、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!