一种基于高频脉振注入的无传感器控制方法
1.本发明涉及永磁同步电机无位置传感器控制算法,属于永磁同步电机无传感器控制领域。
背景技术:
2.永磁同步电机是一种由永磁体励磁产生同步旋转磁场的同步电机,与异步电机相比较,永磁同步电机功率密度大、转动惯量小、能量转换效率高、维护费用低,广泛应用于新能源汽车、航空航天、数控机床等领域。传统的pmsm控制系统通常采用加装机械位置传感器来获取转子位置信息和瞬时转速。如光电编码器、旋转变压器和霍尔传感器等,然而在复杂环境下,机械传感器可能存在对环境要求较高、响应较慢、抗电磁干扰能力弱、以及老化等问题。因此无位置传感器驱动控制的研究对提高系统的可靠性具有非常重要的意义和价值。
3.目前,永磁同步电机无位置传感器运行方法主要分为基于电机反电势的方法和基于电机凸极性的方法。在中高速范围,通常采用基于电机反电势的方法,但是反电势与转速成正比,在低速和零速场合下无法适用。在零速和低速状况下,基于电机凸极性的信号激励方法能够较好地检测位置信息,主要包含脉振高频注入法和旋转高频注入法。相比旋转高频注入法,脉振高频注入法属于幅值解调方法,受延时影响小,位置估计精度高。但是脉振高频注入法在信号解调过程中,采用带通滤波器和低通滤波器提取转子位置信息。滤波器的使用增加了系统复杂性,同时限制了系统带宽,降低了稳定性和动态性。
4.该方法可以解决低速或零速时的电机参数辨识问题,由于该方法要求电机有一定的凸极效应,在内嵌式和插入式同步电机上可以直接实现,而针对表贴式同步电机这类凸极效应不明显的电机则比较难实现,需要通过改造电机内部结构或是通过饱和效应等方式来实现,并且该方法会引起较大的噪音和额外的损失。
技术实现要素:
5.本发明的目的是提供一种永磁同步电机无传感器控制方法,通过该方法解决内置式永磁同步电机在零低速领域下的闭环运行问题。
6.上述目的可以通过以下的技术方法实现,该算法包括如下步骤:
7.步骤1、在估计轴系中d轴注入高频电压信号:
8.步骤2、电流传感器采样得到定子绕组电流,并通过坐标变换变换到同步旋转坐标系中,得到d轴和q轴的定子电流:
9.其中z
avg
=(z
dh
+z
qh
)/2为平均阻抗,z
dif
=(z
dh-z
qh
)/2为半差阻抗。
10.上式可以看出,d-q电流都包含转子位子的误差信息,由于d的电流由两部分组成,但是即使转子位置误差为0,d轴上的电流也不为0,所以在计算转子位置误差时选择q轴上的电流进行处理来获得转子位置估计的输入信号。
11.步骤3、将所得到的q轴电流进行幅值调制。
12.步骤4、使用二阶广义积分器滤除高次谐波分量,代替传统低通滤波器,提取所需的基波分量。
13.步骤5、将上述步骤所得到的高频电流信号接入龙贝格观测器,相较于传统锁相环观测器,龙贝格观测器可以更好的对转子位置信息进行提取,所得转子位置误差也更小,经过观测器提取位置信息可近似看成以下公式:f(δθe)=k
err sin2δθe14.与现有技术比较,本发明的有效结果如下:
15.1、采用龙贝格观测器,可以更好的处理转子位置信息,相较于使用传统锁相环进行转子位置信息处理,具有更小的误差,追踪效果也更好。
16.2、采用二阶广义积分器来进行转子位置信号的提取,相较于传统低通滤波器,二阶广义积分器可以更好的提取所需信号,使转子位置信息更加准确。
附图说明
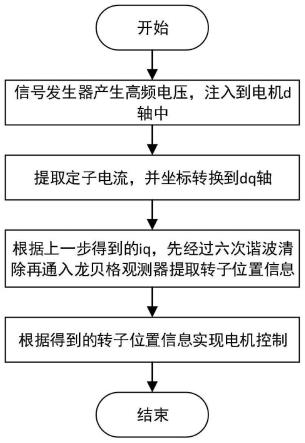
17.图1为本发明方法的流程图。
18.图2为本发明方法的仿真整体框图。
具体实施方式
步骤1、在同步轴系下建立永磁同步电机的数学模型。
19.定子电压方程:
20.定子磁链方程:
21.将上述两公式带入可得:
22.可以看出,所得到的定子电压方程包含耦合项,为了减少耦合带来的干扰,在d轴电压方程中减掉包含q轴电流电感的项,在q轴电压方程中减掉包含d轴电流电感以及磁链的项。即:
23.这样我们就完成了d-q轴的解耦。另外还需要机械运动方程来算出ωe,方程为:
24.其中:te为电磁转矩;t
l
为负载转矩;b为阻尼系数;j为转动惯量;ωm为机械角速度。
25.上述公式中b由于影响很小通常忽略,t
l
需要给定数值,te需要通过公式计算,所以电磁转矩公式为:
26.步骤2、向d轴注入高频电压信号,并且使用电流传感器采样得到定子绕组电流,并通过坐标变换变换到同步旋转坐标系中,得到d轴和q轴的定子电流。
27.步骤3、将所得到的q轴电流进行幅值调制。
28.步骤4、使用二阶广义积分器滤除高次谐波分量,代替传统低通滤波器,提取所需的基波分量。
29.步骤5、将上述步骤所得到的高频电流信号接入龙贝格观测器。
30.步骤6、将得到的转子位置信息进行数学处理,作为双闭环控制中的转速环反馈接入电机主线路中。
31.步骤7、通过将步骤6中的转速反馈通过pi控制,利用svpwm进行电机控制。
技术特征:
1.一种基于脉振高频注入的永磁同步电机无传感器控制方法,其特征在于,将脉振高频电压信号注入到电机中,导致电机产生高频电流,从高频电流响应中估计出电机转子的位置与转速,包括以下步骤:步骤1,高频信号发生器产生高频电压信号v
dh
,并注入到估计轴系中的d轴坐标系中,如下式所示:其中是产生的高频信号,u
h
是高频信号幅值,ω
h
是高频电压角频率,t是信号注入时间,步骤2,电流传感器采样得到定子电流,再坐标变换到同步旋转坐标系,所得到的表达式为:其中z
avg
=(z
dh
+z
qh
)/2,为平均阻抗;z
dif
=(z
dh-z
qh
)/2,为半差阻抗,在估计轴系中的d轴上注入高频电压信号可得:步骤3,所得到的q轴电流进行幅值调制,可得:由公式可知,只要想办法滤除二次谐波分量,即可以保留剩下的直流分量,就可以提取出我们需要的转子位置估计的输入信号,步骤4,使用二阶广义积分器代替传统低通滤波器消除高次谐波分量,提取所需转子位置信号,在步骤3中得到的转子位置信号中,包含大量高次谐波分量,会影响转子位置信息的提取,二阶广义积分器可以提取特定频率的信号,相较于传统低通滤波器能够更好的提取出所需要的信号,步骤5,将上述步骤所得到的高频电流信号接入龙贝格观测器,相较于传统锁相环观测器,龙贝格观测器可以更好的对转子位置信息进行提取,所得转子位置误差也更小,经过观测器提取位置信息可近似看成以下公式:f(δθ
e
)=k
err
sin2δθ
e
其中k
err
为正常数。最后通过pid控制即可实现电机的无位置传感器控制。
技术总结
本发明公开了一种基于高频脉振注入的永磁同步电机无传感器控制方法,本发明将现有传统高频注入方法中的锁相环观测器更换为龙贝格观测器,可以更好的对转子位置信息进行追踪,所得到的位置信息误差相较于传统锁相环也更小,本发明还将转子位置信息处理部分的低通滤波器使用二阶广义积分器代替,由于转子位置信息中包含大量高次谐波信号,会直接增大观测器的误差,利用二阶广义积分器更好的提取所需信号,进一步提高转子位置信息的精度。进一步提高转子位置信息的精度。进一步提高转子位置信息的精度。
技术研发人员:吕德刚 姜国威 邢丽
受保护的技术使用者:哈尔滨理工大学
技术研发日:2022.04.13
技术公布日:2022/6/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1