一种基于自适应滑模观测器的永磁同步电机控制方法
1.本发明涉及永磁同步电机控制领域,具体涉及一种基于自适应滑模观测器的永磁同步电机控制方法。
背景技术:
2.永磁同步电机(pmsm)是一种由永磁体励磁产生同步旋转电场的同步电机,与异步电机相比较,永磁同步电机功率密度大、转动惯量小、能量转换效率高、维护费用低、广泛应用于新能源汽车、航空航天、数控机床等领域。
3.直接转矩控制(dtc)摒弃了传统矢量控制中的解耦思想,而是将转子磁通定向更换为定子磁通定向,取消了旋转坐标变换,减弱了系统系统对电机参数的依赖性,通过实时检测电机定子电压和电流,计算转矩和磁链的幅值,并分别与转矩和磁链的给定值比较,利用所得差值来控制定子磁链的幅值及该矢量相对于磁链的夹角,由转矩和磁链调节器直接输出所需的空间电压矢量,从而达到磁链和转矩直接控制的目的。但直接转矩控制系统存在转矩和磁链脉动,开关频率变化等缺陷。
4.传统的pmsm控制系统通常采用加装机械位置传感器来获取转子位置信息和顺式转速。如光电编码器、旋转变压器和霍尔传感器等,然而在复杂环境下,机械传感器可能存在对环境要求较高、响应较慢、抗电磁干扰能力弱、以及老化等问题。为解决传统机械传感器给系统带来的问题,无位置传感器控制技术成为了电机控制领域的研究热点。目前,适用于永磁同步电机无位置传感器控制方法通常分为两类:一类是适用于中高速运行时的无位置传感器控制方法,包括基于电机反电动势的估算方法、模型参考自适应法、扩展卡尔曼滤波器、滑模观测器等;另一类是适用于零速和低速的无位置传感器控制方法,包括基于电感变化的位置估算法和高频信号注入法。其中,滑模观测器具有算法简单、鲁棒性强等优点,是常用的无位置传感器控制方法之一,然而传统的滑模观测器无位置算法存在着系统抖振的问题,低通滤波器的使用带来相位延迟的问题,低速时转子位置不够精确的问题以及无法实现自启动等问题。
技术实现要素:
5.本发明的目的在于提供一种基于自适应滑模观测器的永磁同步电机控制方法,能够提高电机驱动系统的转子位置跟踪精度,改善动态相应性能,降低转矩脉动,提高系统的稳定性。
6.本发明提供了一种基于自适应滑模观测器的永磁同步电机控制方法,包含以下步骤:
7.s1.通过pi速度调节器根据给定转速ω
*
与电机估计转速的差值得到参考转矩te*;
8.s2.采集a、b、三相电流ia、ib、ic,经过坐标变换得到α、β轴定子电流i
α
和i
β
;通过占空比信号sa、sb、sc计算三相电压ua、ub、uc,经过坐标变换得到α、β轴定子电压u
α
和u
β
;将所述
的三相电流ia、ib、ic,三相电压ua、ub、uc和转子位置角通过计算可得到d、q轴定子电流id,iq和定子电压ud、uq。
9.s3.将所述的d,q轴定子电流id,iq和定子电压ud、uq通过计算可以得到实际磁链flux和实际转矩te;
10.s4.将给定的参考磁链flux
*
与所述实际磁链flux的差值输入滑模磁链调节器,经过滑模磁链调节器输出d轴参考电压将所述参考转矩te
*
与所述实际转矩te的差值输入滑模转矩调节器,经过滑模转矩调节器输出q轴参考电压
11.s5.将所述d轴参考电压q轴参考电压和转子位置角通过坐标变换得到α轴参考电压和β轴参考电压将所述α轴参考电压和β轴参考电压输入svpwm正弦脉冲调制模块,经svpwm正弦脉冲调制模块输出占空比信号sa、sb、sc,然后将所述占空比信号sa、sb、sc输入三相逆变器控制其导通关断,实现对永磁同步电机的驱动;
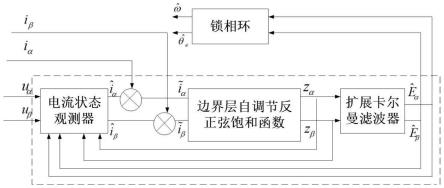
12.s6.计算电流误差状态方程,以电流观测误差作为状态变量,设计新型自适应滑模观测器,所述滑模观测器包括电流状态观测器、电流比较器、边界层自调节反正弦饱和函数模块、扩展卡尔曼滤波器和锁相环。通过滑模观测器输出估算转子位置角和估算转速
13.s7.重复s1-s7,实现电机的闭环稳定运行。
14.进一步的,所述电流状态观测器为:
[0015][0016]
其中,r为定子电阻,ω为电角速度,ld、lq分别为d和q轴电感值;
[0017]
所述α和β轴滑模面控制函数值z
α
、z
β
表示为:
[0018][0019]
其中,ks为开关增益,ks>max(|e
α ,|e
β
|),e
α
、e
β
分别为α和β轴扩展反电动势,narcsin(s)为边界层自调节反正弦饱和函数;
[0020]
所述扩展卡尔曼滤波器为:
[0021][0022]
其中,kk滤波器自适应率,kk>0;分别为α和β轴扩展反电动势观测误差值
[0023]
进一步的,所述边界层自调节反正弦饱和函数为:
[0024][0025]
其中,s
α
、s
β
分别为α和β轴扩展反电动势e
α
、e
β
对应的滑模面,λ为基本边界层厚度。
[0026]
有益效果:本发明将现有滑模观测器中的符号函数替代为基于边界层自调节反正弦函数,同时采用扩展卡尔曼滤波器提取扩展反电动势,去除现有滑模观测器中的低通滤波器,并将提取扩展反电动势反馈至电流状态观测器进行幅值补偿;与现有滑模控制器相比本发明提供的基于边界层自调节反正弦函数的滑模观测器可以有效抑制转矩脉动,提高系统稳态性能,改善转子位置和转速跟踪精确。本发明所提的转子位置和速度估算方法可有效降低系统抖振,提高转子位置和速度估算精度和抑制转矩脉动。
附图说明
[0027]
图1为本发明所述直接转矩控制系统的控制框图;
[0028]
图2为本发明所述基于边界层自调节反正弦饱和函数的滑模观测器的结构框图;
[0029]
图3为本发明所述软件锁相环的结构框图;
具体实施方式
[0030]
下面结合附图对本发明做更进一步的解释。
[0031]
图1的直接转矩控制系统由速度pi调节器、转矩和磁链滑模控制器、svpwm(空间矢量脉冲宽度调制)、三相逆变器、永磁同步电机、基于边界层自调节反正弦饱和函数的滑模观测器、软件锁相环(spll)等环节构成。基于边界层自调节反正弦饱和函数的滑模观测器和软件锁相环用来实时估算电机转子位置和速度以取代机械式位置传感器。
[0032]
如图2所示,基于边界层自调节反正弦饱和函数的滑模观测器包括电流状态观测器、电流比较器、边界层自调节反正弦饱和函数模块、扩展卡尔曼滤波器和软件锁相环。电流状态观测器与边界层自调节反正弦饱和函数模块相连接,边界层自调节反正弦饱和函数模块与扩展卡尔曼滤波器、电流状态观测器模块相连接,扩展卡尔曼滤波器模块与软件锁相环模块、电流状态观测器模块相连接,软件锁相环模块与扩展卡尔曼滤波器模块相连接。
[0033]
估算方法中的电流状态观测器和边界层自调节反正弦饱和函数的设计过程为;
[0034]
αβ坐标下的定子电压方程为:
[0035][0036][0037]
其中,其中,u
α
、u
β
分别为α和β轴电压;i
α
、i
β
分别为α和β轴电流;θe为转子位置角;eα
、e
β
分别为α和β轴扩展反电动势;r为定子电阻,ω为电角速度;ld、lq分别为d和q轴电感值;id、iq分别为d和q轴电流;ψf为永磁体磁链。
[0038]
将(1)式改写为以α和β轴电流为状态变量的方程:
[0039][0040]
将滑模面选取在定子电流轨迹上,即令:
[0041][0042]
其中,分别为α和β轴的电流估计值;分别为α和β轴的电流误差值。
[0043]
为或得扩展反电动势同时减小滤波对扩展反电动势幅值的影响,将扩展反电动势观测值反馈至电流观测器,电流状态观测器设计为:
[0044][0045]
式中,为滑模面控制函数;ks为开关增益,ks>max(|e
α
|,|e
β
|);narcsin(s)为边界层自调节反正弦饱和函数,s为滑模面函数,其表达式为:
[0046][0047]
其中,s
α
、s
β
分别为α和β轴扩展反电动势e
α
、e
β
对应的滑模面,λ为基本边界层厚度。
[0048]
由式(6)可见,narcsin函数可根据滑模面误差实时调节边界层,较小的滑模面误差不会造成边界层厚度过大而影响控制速度,同时滑模面误差间接受转速、转矩或其他参数值变化影响,适用于各种工况下实施调节。
[0049]
估算方法中的α和β轴滑模面控制函数值z
α
、z
β
的计算过程为:
[0050]
将式(5)和(3)作差得到定子电流误差方程为:
[0051][0052]
根据等效控制原理可得扩展反电动势为:
[0053][0054]
估算方法中的α和β轴扩展反电动势观测值由α和β轴滑模面控制函数值,z
α
、z
β
经过扩展卡尔曼滤波器滤波处理后得到,扩展卡尔曼滤波器为:
[0055][0056]
其中,kk为滤波器自适应率,其中,kk滤波器自适应率,kk>0;分别为α和β轴扩展反电动势观测误差值e
α
、e
β
分别为α和β轴扩展反电动势。
[0057]
由于机械时间常数远大于电磁时间常数,所以认定一个估算周期内转速不变,则由式(9)可得
[0058][0059]
为证明式(10)稳定性,定义李雅普诺夫函数:
[0060][0061]
将(10)代入(11)得到:因此扩展卡尔曼滤波器是稳定的。
[0062]
通过软件锁相环估算转子位置角和速度,估算转子位置角和估算转速的计算过程为:
[0063][0064]
其中,k
p
、ki分别为比例、积分系数。软件锁相环的结构框图如图3所示。
[0065]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或者改变,都应被涵盖在本发明保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1