最优转子位置的电机驱动堵转状态主动热控制方法及系统
1.本发明涉及电力电子技术领域的控制技术,具体地,涉及一种最优转子位置的电机驱动堵转状态主动热控制方法及系统。
背景技术:
2.随着电力互联、万物互联等概念的提出,电能的转换及其应用所处的地位变得尤为重要。自从可控硅技术的诞生以来,其所催生的电力电子技术渗透到了电力发展历史的各个角落。在电动汽车等领域,驱动内电力电子器件的可靠性直接与整个系统的稳定运行相关联。以电动汽车为例,电动汽车长时间的大坡度爬坡工况常常引起电动汽车内电机发生堵转。在堵转工况下,因为电机需要在零转速的工况下提供极高的电磁转矩,三相电流此时会呈现直流状态。通常状态下,堵转时的三相电流为不可控,且三相间偏差较大,则驱动内电力电子器件的热应力很有可能会集中在某些器件内,从而导致驱动损坏,引起整个电机驱动系统运行的崩溃。
3.传统的电机驱动系统堵转保护方法,主要采用了针对堵转发生后的控制策略调整。例如在电机发生堵转后主动控制降低电磁转矩;在电机发生堵转后对电驱控制器内部电力电子功率器件进行温度检测,达到温度阈值时进行停机或刹车等等。此类方法主要聚焦于堵转工况发生以后,属于应急保护策略,器件的可靠性完全依赖于策略的自启动,从另一个层面降低了器件的可靠性。
4.经检索,中国专利cn201911387519.9,公开一种电动汽车电机堵转保护方法,采用了滞环控制调整电机电磁转矩的策略限制电机控制器功率器件的温升。该专利的核心思想为:当检测到电机处于堵转状态时先使电机输出最大扭矩,然后使电机扭矩逐渐下降,如果汽车没有出现溜坡,使电机扭矩一直下降至0;如果汽车出现溜坡,保持一段时间后,将电机扭矩增大到大于保持汽车静止所需的最小扭矩,并维持一段时间使汽车可靠静止,然后使电机扭矩逐渐下降,直到再次出现溜坡,并再次使电机扭矩增大到大于保持汽车静止所需的最小扭矩,重复上述过程,直到驾驶员进行制动刹车和拉起手刹等驻车机构。但是该专利破坏了堵转工况下电动汽车的稳定性,通过溜坡、堵转的循环来降低热应力,对驾驶员人身安全以及实际道路交通安全都存在严重隐患。
5.因此,本领域亟需研发一种最优转子位置的电机驱动堵转状态主动热控制方法,以克服上述的技术问题。
技术实现要素:
6.本发明针对现有技术中存在的上述不足,提出了一种最优转子位置的电机驱动堵转状态主动热控制方法。
7.本发明的第一方面,提供一种最优转子位置的电机驱动堵转状态主动热控制方法,包括:
8.检测电机驱动系统中电机的工作状态,对所述电机堵转状态进行判定;
9.若判定所述电机即将进入堵转状态,则在保留原有驱动控制行为的前提下,采用额外的转子位置相角控制,控制所述电机于最优转子位置相角进入堵转状态。
10.可选地,所述检测电机驱动系统中电机的工作状态,包括:采集所述电机驱动系统中电机的工作状态信息,其中,所述工作状态信息包括电机转速、电气角频率以及电磁转矩。
11.可选地,对所述电机堵转状态进行判定,包括:
12.当前电机转速低于设定的转速阈值;
13.当前电气角频率低于设定的电气角频率阈值;
14.当前电机电磁转矩非零,且高于设定的电磁转矩阈值;
15.若同时满足以上条件,则判定当前电机即将进入堵转状态;其中,转速阈值、电气角频率阈值、电磁转矩阈值根据目标电机参数进行确定。
16.可选地,若判定所述电机即将进入堵转状态之后,还包括:
17.对电机堵转状态下的扇区进行划分;
18.基于上述划分识别堵转扇区;
19.根据识别的堵转扇区,确定最优转子位置相角。
20.可选地,所述对电机堵转状态下的扇区进行划分,其中:
21.堵转扇区以电驱变流器电角度180度为范围划分,限制最大电角度偏移量小于等于90度;
22.在所述堵转扇区内,存在电机电流各相矢量和的幅值最小点;
23.在所述堵转扇区内,存在特定k相电流应力最小工作点,其中,在三相系统中,特定相k相为a相、b相、c相任意一相。
24.可选地,所述根据识别的堵转扇区,确定最优转子位置相角,包括:最优转子位置相角与堵转扇区一一对应,且最优转子位置相角处于所在堵转扇区的转子位置相角范围中心。
25.可选地,所述转子位置相角控制,控制所述电机于最优转子位置相角进入堵转状态,包括:
26.采用电机转子位置控制器,根据当前电机转子位置相角与最优转子位置相角通过闭环调节,生成目标电机驱动系统的转速参考信号;
27.通过转速参考切换,替换原始电机驱动系统的转速参考信号,控制电机于最优转子位置相角进入堵转状态。
28.可选地,在电机堵转工况下,所述方法能对电驱变流器的三相电热应力进行主动分配,并降低电驱变流器的最大电热应力峰值,以及电热应力相间差异。
29.本发明的第二方面,提供一种最优转子位置的电机驱动堵转状态主动热控制系统,包括:
30.采集模块,该模块采集电机驱动系统中电机的工作状态;
31.堵转状态判断模块,根据所述采集模块的工作状态信息,对所述电机堵转状态进行判定;
32.转子位置相角控制模块,若所述堵转状态判断模块判定所述电机即将进入堵转状态,所述转子位置相角控制模块控制所述电机于最优转子位置相角进入堵转状态。
33.本发明的第三方面,提供一种最优转子位置的电机驱动堵转状态主动热控制终端,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述控制系统执行所述控制程序时可用于执行上述的最优转子位置的电机驱动堵转状态主动热控制方法。
34.由于采用了上述技术方案,本发明与现有技术相比,具有如下至少一项的有益效果:
35.本发明提供的一种最优转子位置的电机驱动堵转状态主动热控制方法和系统,当电机驱动系统运行于正常工况下,所述方法不扰动原始电驱控制行为;当检测电机即将进入堵转工况时,所述方法在不改变电机驱动原始控制器内部控制算法与控制参数的前提下,通过对电机驱动控制器的转速参考信号进行切换,实现堵转工况下的最优转子位置。该方法可最大限度地保留、还原原始电驱控制器的各类特性。
36.本发明提供的一种最优转子位置的电机驱动堵转状态主动热控制方法和系统,控制电机于最优转子位置相角进入堵转状态,通过电驱变流器相间电热应力的重新分配,预防了电机堵转工况下因三相电流分配不均所导致的电力电子半导体器件单相热应力的过度集中,大幅提高了电机电驱变流器电力电子功率半导体器件的可靠性。
37.本发明提供的一种最优转子位置的电机驱动堵转状态主动热控制方法和系统,同时考虑到电驱变流器相间的热耦合矩阵的不对称特性,通过灵活地选择特定相k相的计算常量,可使k相内电流应力降低为零。
附图说明
38.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
39.图1为本发明一实施例中最优转子位置的电机驱动堵转状态主动热控制方法的流程图;
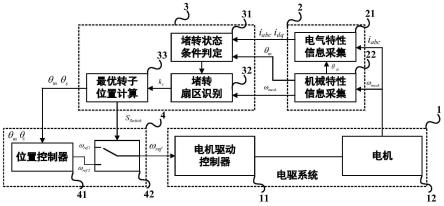
40.图2为本发明一较优实施例中最优转子位置的电机驱动堵转状态主动热控制方法的流程图;
41.图3为本发明一较优实施例中最优转子位置的电机驱动堵转状态主动热控制方法的堵转状态预先判定的流程图;
42.图4为本发明一较优实施例中最优转子位置的电机驱动堵转状态主动热控制方法的堵转扇区与最优转子位置相角的示意图;
43.图5为本发明一较优实施例中最优转子位置的电机驱动堵转状态主动热控制方法的位置控制器的示意图;
44.图6为本发明一较优实施例中最优转子位置的电机驱动堵转状态主动热控制方法的电流应力优化的示意图;
45.图7为本发明一较优实施例中最优转子位置的电机驱动堵转状态主动热控制方法的热应力与损耗优化的示意图;
46.图中:
47.1-原始电机驱动系统;
48.11-电机驱动控制器;
49.12-电机;
50.2-电机驱动系统信息采集部分;
51.21-电气特性信息采集;
52.22-机械特性信息采集;
53.3-堵转工况判定及最优转子位置生成部分;
54.31-堵转状态条件判定;
55.32-堵转扇区识别;
56.33-最优转子位置计算
57.4-最优转子位置控制器;
58.41-位置控制器;
59.42-转速参考切换模块。
具体实施方式
60.下面对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
61.图1为本发明一实施例中最优转子位置的电机驱动堵转状态主动热控制方法的流程图。参照图1所示,该控制方法包括如下步骤:
62.s100,检测电机驱动系统中电机的工作状态,对电机堵转状态进行判定;
63.s200,若判定电机即将进入堵转状态,则在保留原有驱动控制行为的前提下,通过额外的转子位置相角控制,控制电机于最优转子位置相角进入堵转状态。
64.本实施例采用的控制方法,当电机驱动系统运行于正常工况下,所述方法不扰动原始电驱控制行为;当检测电机即将进入堵转状态时,所述方法通过控制电机于最优转子位置相角进入堵转状态,从而实现对电驱变流器三相电热应力进行主动控制,降低电驱变流器的最大电热应力及相间电热应力差异,不破坏堵转工况下电机驱动的稳定性。
65.上述s100中,检测电机驱动系统中电机的工作状态,在一些实施例中,可以通过采集电机驱动系统中电机的工作状态信息进行,其中,工作状态信息可以包括机械特性部分、电气特性部分,具体的,包括电机转速、电气角频率以及电磁转矩中一种或多种。更进一步的,机械特性对应的工作状态信息包括电机转子转速信息、电机转子位置信息。其中,电机转子转速信息可通过编码器、旋转变压器等转速信息采集工具获取,可集成于原始电机驱动系统转速信息获取方式;电机转子位置信息可由编码器、旋转变压器等位置采集工具获取,也可先通过定子电流锁相环获取电气角频率,经过电机等效极对数模型后计算获取。另外,电气特性对应的工作状态信息包括电机定子三相电流、电机定子三相电压;其中,电机定子三相电流信息,可结合电机转子转速信息与电机转子位置信息,经过派克变换获得在电机交直轴坐标系下的定子电流信号。三相坐标系、交直轴坐标系下的电流信号,分别参与电气角频率的计算与电机电磁转矩的计算,也用于堵转扇区的识别与最优转子堵转位置相角的计算。
66.上述s100中,对电机堵转状态进行判定,在一些实施例中,其中对电机堵转状态判
定的生效工况为:电机电机转矩不足以完全支撑负载转矩,转速较低,且电机正在减速。另外,对于电机即将进入堵转工况的判定条件包括但不限于:电机转速低于设定阈值;电驱变流器电气角频率低于设定阈值;电机电磁转矩大于设定阈值。本实施例中,这三个条件需要同时满足,其中,电机转速低于阈值、电气角频率低于阈值,能判定电机是否快要停止转动;电磁转矩大于阈值,能判定电机是否仍然输出电磁转矩。
67.上述s200,在一些实施例中,根据上述判定条件,若判定电机即将进入堵转工况,则对电机堵转状态下的扇区进行划分。具体的,实施例中采用的划分方式可以为:堵转扇区以电驱变流器电角度180度为范围划分,可限制最大电角度偏移量小于等于90度;在该堵转扇区内,存在电机电流各相矢量和的幅值最小点;在该堵转扇区内,存在特定k相电流应力最小工作点,其中,在三相系统中,特定相k相可为a相、b相、c相任意一相。在一些具体实施例中,上述的特定相k相的选取方式包括但不限于:任意选取电驱相;考虑电驱变流器功率半导体器件热耦合关系,选择热耦合效应最严重的相,如果电驱变流器功率半导体器件为常用模块封装,则一个优选对象为b相。基于选定的特定相,设定于堵转状态下该相电流应力为零,对应选定堵转扇区判定常量与最优转子位置计算常量θk,在三相系统中,θa为0,θb为2π/3,θc为-2π/3。本实施例中,同时考虑到电驱变流器相间的热耦合矩阵的不对称特性,通过灵活地选择特定相k相的计算常量,可使k相内电流应力降低为零。
68.为了更好实现上述s200的控制,在一些实施例中,基于上述识别堵转扇区ks,可对最优电机转子位置相角进行计算。较好地,最优电机转子位置相角与堵转扇区一一对应,且最优转子位置相角处于所在堵转扇区的转子位置相角范围中心。
69.具体的,最优转子堵转位置相角计算公式为:
[0070][0071]
式中,θs为最优电机转子位置相角,n
p
为电机等效极对数,id,iq是电机定子电流在dq旋转坐标系下的分量,θk为基于特定相k相的最优转子位置计算常量,可通过设定不同的最优转子位置计算常量θk,使θs为特定k相电流应力的最小工作点,其中θa为0,θb为2π/3,θc为-2π/3。该计算方法可以实现:在计算所得的机械角度位置处,存在三相电流分配最优点,同时,该点也是特定k相电流应力的最小工作点。
[0072]
基于上述当前电机转子位置相角与最优转子位置相角,电机转子位置控制器可通过闭环调节,生成目标电机驱动系统的转速参考信号,通过转速参考切换,替换原始电机驱动系统的转速参考信号,控制电机于最优转子位置相角进入堵转状态。
[0073]
在一些实施例中,上述s200中,采用转子位置相角控制,控制电机于最优转子位置相角进入堵转状态,其中是采用电机转子位置控制器来实现的,具体的,根据当前电机转子位置相角与最优转子位置相角通过闭环调节,生成目标电机驱动系统的转速参考信号;通过转速参考切换,替换原始电机驱动系统的转速参考信号,控制电机于最优转子位置相角进入堵转状态。
[0074]
具体的,在一优选实施例中,采用电机转子位置控制器,以当前转子位置相角与计算获得的堵转状态最优转子位置相角为输入,输出电驱控制系统的的转速参考信号,使电机在堵转工况下的位置与最优转子位置相同。
[0075]
上述实施例中,采用转速参考切换,其不影响电机驱动系统正常工作模式,在未判定即将进入堵转工况时,转速参考仍由原始控制策略下的转速参考给定信号决定;在判定即将进入堵转工况时,转速参考切换至电机转子位置控制器输出的转速参考信号,控制电机于最优转子位置相角进入堵转工况。从而可以最大限度地保留、还原原始电驱控制器的各类特性。
[0076]
基于上述各实例中的控制方法,在电机堵转工况下,能实现对电驱变流器的三相电热应力进行主动分配,并降低电驱变流器的三相电热应力峰值,以及电热应力相间差异。其中,三相电热应力主动分配,包括:三相电流峰值应力最小化;特定相k相电流应力为零;非特定相电流应力均衡分配。本发明各实施例通过电驱变流器相间电热应力的重新分配,可以预防电机堵转工况下因三相电流分配不均所导致的电力电子半导体器件单相热应力的过度集中,大幅提高了电机电驱变流器电力电子功率半导体器件的可靠性。
[0077]
具体的,三相电流应力峰值为三相电机驱动系统中电流瞬时值绝对值的最大值,其代表着施加于电驱变流器功率半导体器件的瞬时最大电流应力,为决定堵转工况下电驱变流器可靠性的主要因素,三相电流应力峰值的计算方式如下:
[0078]
mcs=max(|ia|,|ib|,|ic|)
[0079]
式中,mcs为三相电流应力峰值,ia为a相定子电流,ib为b相定子电流,ic为c相定子电流。
[0080]
上述实施例中,电机包括但不限于永磁同步电动机、感应电动机等三相交流电动机。所述电驱控制策略,包括但不限于磁场定向控制、直接转矩控制、最大转矩电流比控制。
[0081]
基于相同的技术构思,本发明另一实施例中还提供一种最优转子位置的电机驱动堵转状态主动热控制系统,用于实现上述各实施例中的电机驱动堵转状态主动热控制方法。具体的,该控制系统包括:采集模块、堵转状态判断模块和转子位置相角控制模块,其中,采集模块采集电机驱动系统中电机的工作状态;堵转状态判断模块根据采集模块的工作状态信息,对电机堵转状态进行判定;转子位置相角控制模块,若堵转状态判断模块判定电机即将进入堵转状态,转子位置相角控制模块控制电机于最优转子位置相角进入堵转状态。本实施例可以实现对电驱变流器三相电热应力进行主动控制,降低电驱变流器的最大电热应力及相间电热应力差异。
[0082]
在一些实施例中,采集模块包括电气特性信息采集部分、机械特性信息采集部分,具体对应的信息与电机驱动堵转状态主动热控制方法相同。堵转状态判断模块的堵转状态条件判定,与上述方法s100中技术对应。转子位置相角控制模块的转子位置相角控制,与上述方法s200中技术对应。在此不再赘述。
[0083]
在一些优选实施例中,最优转子位置的电机驱动堵转状态主动热控制系统还包括堵转扇区识别模块、最优转子位置计算模块、位置控制器、转速参考切换模块中一种或多种,这些部分/模块具体实现技术可以采用上述方法中对应的技术。
[0084]
基于相同的技术构思,本发明另一实施例中还提供一种最优转子位置的电机驱动堵转状态主动热控制终端,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述控制系统执行所述控制程序时可用于执行上述实施例中任一所述的最优转子位置的电机驱动堵转状态主动热控制方法。
[0085]
为了更好对本发明上述技术方案进行说明,以下结合优选实施例来详细描述,但
应该理解的是,本发明并不局限于以下优选实施例。
[0086]
图2为本发明一实施例中最优转子位置的电机驱动堵转状态主动热控制方法的流程图。如图2所示,最优转子位置的电机驱动堵转状态主动热控制方法,可以包括:电气特性信息采集部分;机械特性信息采集部分、堵转状态条件判定部分、堵转扇区识别部分、最优转子位置计算部分、位置控制器部分、转速参考切换模块部分。以下对本优选实施例中涉及的上述各部分进行分别说明。
[0087]
21-电气特性信息采集部分,包括对电机定子电流、电机定子电压的信息采集。其中,电机定子三相电流信息,可结合采集的的机械转速信号与机械位置信号,经过派克变换获得在电机交直轴坐标系下的定子电流信号。三相坐标系、交直轴坐标系下的电流信号,分别参与电气角频率的计算与电机电磁转矩的计算,也用于堵转扇区的识别与最优转子堵转位置相角的计算。
[0088]
22-机械特性信息采集部分,包括电机转子转速信息、电机转子位置信息。其中,电机转子转速信息可通过编码器、旋转变压器等转速信息采集工具获取,可集成于原始电机驱动系统转速信息获取方式;电机转子位置信息可由编码器、旋转变压器等位置采集工具获取,也可先通过定子电流锁相环获取电气角频率,经过电机等效极对数模型后计算获取。
[0089]
31堵转状态条件判定部分,其判定方式为:当前电机转速低,且低于设定阈值;当前电气角频率低,且低于设定阈值;当前电机电磁转矩非零,且高于设定阈值。若满足以上判定条件,则判定当前电机即将进入堵转状态。其中,转速阈值、电气角频率阈值、电磁转矩阈值可根据目标电机参数进行个体化差异设计。
[0090]
32-堵转扇区识别部分,若判定即将进入堵转工况,则对电机堵转扇区进行识别、划分。划分方式为:堵转扇区以电驱变流器电角度180度为范围,在该堵转扇区内,存在三相电流应力峰值最小点;在该堵转扇区内,存在特定相k相电流应力最小工作点,其中,在三相系统中,特定相k相可为a相、b相、c相任意一相。堵转扇区识别计算可用公式表述为:
[0091][0092]
式中,ks为识别的堵转扇区,rounddown()为向下取整函数,θm为当前电机转子位置相角,n
p
为电机等效极对数,id,iq是电机定子电流在dq旋转坐标系下的分量,θk为基于特定相k相的堵转扇区判定常量,其中θa为0,θb为2π/3,θc为-2π/3。
[0093]
33-最优转子位置计算部分,基于上述识别堵转扇区ks,可对最优转子位置相角进行计算。计算方法为:最优转子位置相角与堵转扇区一一对应,且最优转子位置相角处于堵转扇区的中心。最优转子堵转位置相角用公式表述为:
[0094][0095]
式中,θs为最优转子位置相角,n
p
为电机等效极对数,id,iq是电机定子电流在dq旋转坐标系下的分量,θk为基于特定相k相的最优转子位置计算常量,其中θa为0,θb为2π/3,θc为-2π/3。
[0096]
41-位置控制器,以当前转子位置相角与最优转子位置相角为输入,生成判定即将
进入堵转状态时输入电机驱动的转速参考信号,使电机在堵转工况下的位置与最优转子位置相同,电机转子位置控制器的控制方式包括但不限于:比例控制(p)、比例积分(pi)控制以及比例积分微分(pid)控制,具体控制方式用公式表达为:
[0097]
ω
ref
=k
p
·
(θ
s-θm)
[0098][0099][0100]
式中,ω
ref
为位置控制器所输出的电机转速参考信号,用于给定原始电驱控制系统作为输入信号;θm为当前电机转子位置相角,θs为最优转子位置相角,k
p
为比例控制器的控制系数,ki为积分控制器的控制系数,ks为微分控制器的控制系数,s为微分算子。
[0101]
42-转速参考切换模块,其不影响电机驱动系统正常工作模式,在未判定即将进入堵转工况时,转速参考仍由原始转速参考信号决定;在判定即将进入堵转工况时,转速参考通过开关切换至电机转子位置控制器输出的转速参考信号,控制电机于最优转子位置相角进入堵转工况。
[0102]
在该优选实施例中,电机驱动系统应用场景为电动汽车,驱动侧逆变器功率半导体开关器件为igbt,电机为永磁同步电机,4对极。且当前时刻电动汽车处于爬坡工况下,由于交通拥堵,即将在路口面临堵转停机的工况。
[0103]
第一步,电机驱动系统信息采集部分获取电动汽车电机当前状态。在该优选实施例中,电气特性信息采集主要采集定子电流信息,用于获取电机交流母线三相、交直轴电流信息;机械特性信息采集主要采集电机转子转速与转子位置,其中,电机转子转速由增量式编码器获取,电机转子位置由增量式编码器、电机定子电流锁相环协同获取。
[0104]
第二步,如图3所示,为一实施例中最优转子位置的电机驱动堵转状态主动热控制方法的堵转状态预先判定的流程图,图中,ω
mech
为电机机械角速度,ω
mech_threshold
为电机速度角速度判定阈值,i
abc
为三相坐标系下电机定子电流,ω
ele
为三相定子电流锁相环输出的电气角频率,ω
ele_threshold
为电气角速度判定阈值,i
dq
为交直轴坐标系下电机定子电流,te为计算所得电机电磁转矩,t
e_threshold
为电机电磁转矩判定阈值,f
ω
,f
t
,f
t
分别为机械角速度判定结果、电气角速度判定结果、电磁转矩判定结果,flag
stall
为电机堵转判定结果。
[0105]
本步骤中,堵转状态条件判定部分判定当前电机机械角速度ω
mech
低于阈值ω
mech_threshold
,电气角频率ω
ele
低于阈值ω
ele_threshold
,电磁转矩te高于额定电磁转矩t
threshold
,则判定当前电动汽车电机即将进入堵转状态,而并非正常停机或正常工作状态。
[0106]
第三步,对当前堵转扇区进行识别,识别公式如下:
[0107][0108]
式中,ks为识别的堵转扇区,rounddown()为向下取整函数,θm为当前电机转子位置相角,n
p
为电机等效极对数,id,iq是电机定子电流在dq旋转坐标系下的分量,θk为基于特定相k相的堵转扇区判定常量。
[0109]
在该优选实施例中,如图4所示,为实施例中最优转子位置的电机驱动堵转状态主
动热控制方法的堵转扇区与最优转子位置相角的示意图,ks为当前堵转扇区,θs为最优转子位置相角。当前电机转子位置θ
mech
为8π/7,d轴电流为0,特定相选择为b相,θk为θb,等于2π/3,则角度区域ks判定为区域iv,计算过程如下:
[0110][0111]
第四步,对最优转子位置相角进行计算,计算公式如下:
[0112][0113]
式中,θs为最优转子位置相角,n
p
为电机等效极对数,id,iq是电机定子电流在dq旋转坐标系下的分量,θk为基于特定相k相的最优转子位置计算常量。
[0114]
在该优选实施例中,角度区域ks判定为区域iv,在该区域内的最优转子位置相角θs为7π/6,计算过程如下:
[0115][0116]
第五步,位置控制器接收最优转子位置计算部分生成的最优转子位置相角和当前转子位置,通过位置控制器的控制算法,输出新的参考转速。如图5所示,为实施例中最优转子位置的电机驱动堵转状态主动热控制方法的位置控制器的示意图,图中,ω
ref2
在位置控制器输出的转速参考信号,k
p
为比例控制系数,θs为最优转子位置相角,θ
mech
为当前转子位置相角。
[0117]
在该优选实施例下,位置控制器采用比例控制算法,以获得较优的转矩稳定,控制算法如下式所示:
[0118]
ω
ref
=0.95
·
(θ
s-θ
mech
)
[0119]
最后,转速参考切换模块暂时取消电动汽车加速踏板的控制权限,转让转速参考信号来源至位置控制器输出。电动汽车电机停机于转子位置7π/6,系统进入堵转。此时,电机驱动逆变器内功率半导体器件的三相电流应力实现最优,三相电流应力峰值从26.5a下降至23a,三相电流分配最合理,并且此时特定相b相的电流应力为0,如图6所示。对应的,器件的热应力也得到了优化,如图7所示。其中,igbt的最高温度从77℃下降至68℃,对应的损耗从36.5w下降至30.6w。
[0120]
本发明上述优选实施例在保留原有驱动控制行为的前提下,通过额外的转子位置相角控制,可使电机位于特定最优转子位置进入堵转状态,在该最优转子位置下,电机驱动变流器的电流应力峰值得以优化。进一步的,实施例方法可通过相角常量设定(θk选定为a、b、c,可以使k相的电流降低为零),灵活地将电机特定相的电流降低为零。
[0121]
本发明上述优选实施例,方法使电机位于特定最优转子位置进入堵转状态,改善了电驱变流器在堵转工况下热应力较大和应力相间分配不均的问题,提高了电机驱动变流器的可靠性,增强了电机堵转状态下的控制能力。
[0122]
需要说明的是,本发明上述实施例提供的所述方法中的步骤,可以利用所述系统中对应的模块、装置、单元等予以实现,本领域技术人员可以参照所述系统的技术方案实现所述方法的步骤流程,即,所述系统中的实施例可理解为实现所述方法的优选例,在此不予赘述。
[0123]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明实施例提供的系统及其各项装置可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0124]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。在不冲突的情况下,本发明的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1