一种基于输出反馈的Boost变换器的切换控制方法
一种基于输出反馈的boost变换器的切换控制方法
技术领域
1.本发明涉及一种基于输出反馈的boost变换器的切换控制方法,属于dc-dc boost变换器控制技术领域。
背景技术:
2.boost变换器是一类典型的dc-dc变换器,用于转变输入电压并有效输出固定电压,作为可变直流电源,在工业现场有非常多的应用。传统的dc-dc变换器控制策略基于小信号模型的脉宽调制(pwm)法,通过固定的开关频率实现输出电压的稳态控制,但是小信号模型是系统在工作点的近似线性模型,因此基于小信号模型的控制方法只能保证系统在工作点的稳态输出,而无法保证系统从初始点到工作点之间的动态特性。而如果系统从初始点到工作点之间的动态特性无法保证,则可能导致系统到达稳态的时间有延迟,或者出现超调现象,而这些后果会导致器件损伤,降低器件使用寿命。
3.为改善系统的动态特性,实现更加灵活的控制目标,同时减少超调和延迟现象,基于大信号模型的控制方法被应用于dc-dc变换器的控制当中,例如变结构控制、状态轨迹控制等。但是这些基于大信号模型的控制方法需要采集系统全状态的信息,包括系统中的电流、电压值,增加了系统的控制成本,增加了控制系统的信息冗余。
4.因此,本技术提出一种新的boost变换器切换控制方法。
技术实现要素:
5.为了在不增加系统控制成本的基础上改善系统的动态特性,本发明提供了一种基于输出反馈的boost变换器的切换控制方法,所述方法基于切换控制系统实现,所述切换控制系统包括:输出电压采集器件、luenberger观测器、切换判断器和驱动电路;
6.所述输出电压采集器件用于采集boost变换器的输出电压vc;所述luenberger观测器用于根据输出电压vc观测boost变换器状态;所述切换判断器用于根据luenberger观测器观测到的boost变换器状态、并根据输入的期望输出电压v
ref
确定切换信号的状态;所述驱动电路用于根据切换信号控制boost变换器中mosfet管的开通与关断以实现对于boost变换器的输出控制。
7.可选的,所述切换信号的状态由时变函数σ确定:
[0008][0009]
其中,正定对称矩阵p为切换控制器增益;x
ref
为boost变换器的期望状态;为观测状态;ai和bi表示boost变换器的系统参数矩阵。
[0010]
可选的,所述输出电压采集器件采用运放芯片lm358实现对于boost变换器的输出电压vc的采集。
[0011]
可选的,所述系统采用stm32f103c8tx单片机实现luenberger观测器及切换判断器的功能。
[0012]
可选的,所述系统内部的数据传输通过usb转串口芯片ch340实现。
[0013]
本技术还提供一种基于输出反馈的boost变换器的切换控制方法,所述切换控制方法基于上述切换控制系统实现,所述方法包括:
[0014]
步骤s1,建立切换控制系统的状态空间切换模型:
[0015][0016]
其中,系统状态x=[i
l vc]
·
,i
l
为电感电流,vc为电容电压,即输出电压;y表示系统输出状态;a
σ
、b
σ
和c
σ
,表示根据切换信号的状态确定的系统的参数矩阵;
[0017]
步骤s2,根据期望输出电压v
ref
确定boost变换器的期望状态:
[0018][0019]
其中,r为负载电阻值,e为电源输入电压值;
[0020]
步骤s3,采集boost变换器的输出电压vc,并根据输出电压对系统的状态进行观测,得到系统的观测状态:
[0021][0022]
式中,为观测状态,l
σ
为观测器增益;
[0023]
步骤s4,通过观测器输出的观测状态以及闭环系统的期望状态确定时变函数σ的取值,进而确定切换信号的状态:
[0024][0025]
其中,正定对称矩阵p为切换控制器增益;
[0026]
步骤s5,根据切换信号的状态控制控制boost变换器中mosfet管的开通与关断,实现对于boost变换器的控制。
[0027]
可选的,时变函数σ取值为1时,对应的切换信号的状态表示mosfet导通;时变函数σ取值为2时,对应的切换信号的状态表示mosfet关断;
[0028]
对应的系统矩阵a
σ
、b
σ
和c
σ
分别为:
[0029]
c1=c2=[0 1]
[0030]
其中,r0为电感串联电阻值,l为电感值,c为电容值。
[0031]
本发明有益效果是:
[0032]
通过建立切换控制系统的状态空间切换模型,引入切换luenberger观测器,通过采样系统的输出电压对系统状态进行观测,利用观测状态设计切换判断函数,通过驱动电路将切换信号作用于mosfet管,从而实现boost变换器的输出反馈切换控制方法。本技术方法能够改善系统的动态特性,实现更加灵活的控制目标,输出反馈的引入降低了系统的控制成本,仅通过输出电压的采样即可实现系统的控制目标。
附图说明
[0033]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0034]
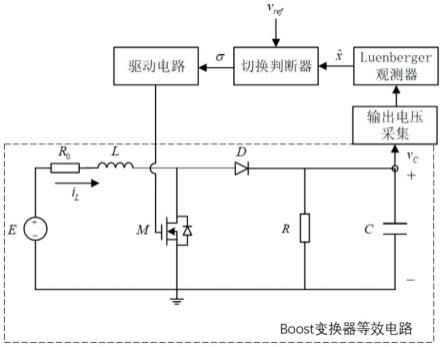
图1是本技术一个实施例中boost变换器的输出反馈切换控制结构框图。
[0035]
图2a是本技术一个实施例中切换信号σ=0时的boost变换器等效电路图。
[0036]
图2b是本技术一个实施例中切换信号σ=1时的boost变换器等效电路图。
[0037]
图3a是本技术一个实施例中的仿真电流状态响应曲线。
[0038]
图3b是本技术一个实施例中的仿真电压状态响应曲线
[0039]
图4a是本技术一个实施例中仿真电流观测误差曲线。
[0040]
图4b是本技术一个实施例中仿真电压观测误差曲线
[0041]
图5a是现有基于pwm的pid闭环控制电流状态响应曲线;
[0042]
图5b是现有基于pwm的pid闭环控制电压状态响应曲线;
[0043]
图6是是本技术一个实施例中闭环控制系统实验模块图。
[0044]
图7是本技术一个实施例中闭环控制系统实验输出电压响应曲线。
具体实施方式
[0045]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
[0046]
实施例一:
[0047]
本实施例提供一种基于输出反馈的切换控制系统,参见图1,所述切换控制系统用于实现对boost变换器的控制,所述切换控制系统包括:输出电压采集器件、luenberger观测器、期望输出电压设定端、切换控制器和驱动电路;所述输出电压采集器件、luenberger观测器、切换判断器和驱动电路依次相连;其中输出电压采集器件用于采集boost变换器的输出电压vc,所述luenberger观测器用于根据系统输出电压值观测boost变换器状态所述切换控制器用于根据设定的期望输出电压v
ref
以及boost变换器状态观测值确定切换信号的状态;所述驱动电路用于根据切换信号的状态控制boost变换器中的mosfet管的开通或关断,以实现对于boost变换器动态控制。
[0048]
如图1所示,boost变换器等效电路包括电源e、电感l、电感串联电阻r0、mosfet管、续流二极管d以及电容c,以r表示负载电阻。
[0049]
所述输出电压采集器件可采用运放芯片lm358实现对于boost变换器的输出电压vc的采集。所述系统可采用stm32f103c8tx单片机实现luenberger观测器及切换判断器的功能。系统内部的数据传输通过usb转串口芯片ch340实现。
[0050]
实施例二:
[0051]
本实施例提供一种基于输出反馈的boost变换器的切换控制方法,所述方法基于实施例一所述的切换控制系统实现,所述方法包括:
[0052]
根据boost变换器等效电路建立切换控制系统的状态空间模型;boost变换器等效电路中的mosfet管的开通与关断对应于切换控制系统中切换信号σ的状态。
[0053]
令系统状态x=[i
l vc]
·
,i
l
为电感电流,vc为电容电压,如图1所示,电容c与负载电阻r并联,因此电容电压vc也即输出电压。
[0054]
则系统状态空间切换模型表示为:
[0055][0056]
式中,
[0057]
c1=c2=[0 1]。
[0058]
式中a1、b1和c1是mosfet导通时的系统矩阵,a2、b2和c2是mosfet关断时的系统矩阵,r0为电感串联电阻值,r为负载电阻值,l为电感值,c为电容值,e为电源输入电压值。
[0059]
所述切换控制方法根据期望输出电压设定端的输入v
ref
确定切换控制系统的期望状态:
[0060][0061]
所述切换控制方法中的luenberger观测器通过输出电压对系统的状态进行观测:
[0062][0063]
式中,为观测状态,l
σ
为观测器增益。
[0064]
所述切换控制方法中的切换控制器通过观测器输出的观测状态以及闭环系统的期望状态判断系统的切换信号的状态,具体,根据时变函数σ确定:
[0065][0066]
式中,正定对称矩阵p为切换控制器增益。
[0067]
所述切换控制方法中的观测器增益li和切换控制器增益p可以通过求解如下线性矩阵不等式条件得到:
[0068][0069]
可通过matlab中的lmi工具箱求解,可得对称正定矩阵及矩阵观测器增益则通过li=p-1ri
求解。
[0070]
实施例三
[0071]
本实施例提供一种基于输出反馈的boost变换器的切换控制方法,所述方法基于实施例一所述的切换控制系统实现,所述方法包括:
[0072]
步骤1,建立切换控制系统的状态空间切换模型,并根据boost变换器输入电压及元件参数计算切换控制系统系统的状态空间切换模型的系统参数矩阵;
[0073]
步骤2:根据期望输出电压计算切换控制系统的期望状态;
[0074]
步骤3:根据步骤1确定的系统参数矩阵及步骤2计算出的期望状态计算切换控制系统的观测器增益及切换控制器增益;
[0075]
步骤4:将观测器增益代入luenberger观测器中对系统状态进行观测。将切换控制器增益代入切换判断函数,确定系统的切换信号,并通过驱动器作用于mosfet管,确定mosfet管的开通或关断状态;
[0076]
为了验证上述基于输出反馈的boost变换器的切换控制方法的有效性,基于图1所示的boost变换器输出反馈切换控制结构框图,在matlab中搭建仿真模型。
[0077]
图3a是在本技术提出的切换控制方法的控制下boost变换器的系统状态响应的电流响应曲线,图3b是在本技术提出的切换控制方法的控制下boost变换器的系统状态响应的输出电压响应曲线,可以看出在输出反馈切换控制器得控制下,输出电压能够稳定到期望的输出电压。
[0078]
图4a是在本技术提出的切换控制方法的控制下boost变换器的电流观测误差曲线,图4b是在本技术提出的切换控制方法的控制下boost变换器的输出电压观测误差曲线;观测误差是指系统状态与观测状态之间的误差,可以看出本技术所设计的luenberger观测器能够渐近观测系统状态。
[0079]
图5a是现有的基于pwm的pid闭环控制曲线的电流曲线;图5b是现有的的基于pwm的pid闭环控制曲线的输出电压曲线,pid控制参数通过试错法根据实际输出效果进行调整,具体介绍可参见“《电力电子技术》王兆安刘进军主编”中对于pwm技术的介绍;可以看出系统的超调量大,稳定时间长,稳态误差大。
[0080]
为了验证理论分析及仿真结果的正确性,本技术设计了图6所示的boost变换器的输出反馈控制平台。控制器选用stm32f103c8tx单片机,用于实现luenberger观测器及切换判断器的功能,系统时钟72mhz,控制时序定时器设置为10khz,ad转换通过单片机内部ad转换器实现,电压采样通过运放芯片lm358实现,数据传输通过usb转串口芯片ch340实现,控制实验电路参数与仿真参数相同。
[0081]
图7给出实验输出电压的响应曲线,可以看出实验响应曲线与仿真响应曲线非常接近。
[0082]
综上所述,仿真与实验结果一致,验证了本技术方法的有效性。
[0083]
本发明实施例中的部分步骤,可以利用软件实现,相应的软件程序可以存储在可读取的存储介质中,如光盘或硬盘等。
[0084]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1