一种基于固液摩擦发电的柔性自驱动传感纤维及其制备和应用
1.本发明属于传感器及其制备和应用领域,特别涉及一种基于固液摩擦发电的柔性自驱动传感纤维及其制备和应用。
背景技术:
2.随着信息时代的到来和科学技术的快速发展,各种功能的传感设备已广泛应用于生产和生活中,人们日常使用的传感设备越来越倾向于小型化、便捷化,可穿戴传感设备也应运而生,并在健康监测、环境监测、危险预警、工业安全等领域有着广泛的应用前景。然而,目前大部分无线传感器仍然采用传统的电池来供电,其需要频繁更换电池,维护成本高,而且废旧电池也会对环境造成一定的污染。因此,亟需一种无污染、贴合度好、可伸缩的多功能自驱动传感设备。
3.自驱动传感是一种无需外部供电、从环境中获取能源进行自供电的一种新型传感方式,这为可穿戴的传感器供电问题提供了一种新的解决方案。摩擦纳米发电机作为一种机械能收集装置,一方面可以收集多种形式的机械能并将其转化为电能来驱动其他电子元器件;另一方面利用其对环境扰动的敏感特性,其本身也可以作为自驱动传感器来使用,因此在智能可穿戴传感领域备受关注。经过多年的发展,科研人员开发出了多种基于摩擦纳米发电机的自供能传感设备,并成功的应用于运动传感、位置传感、离子浓度检测、环境监测、压力传感、气体检测等领域[nano energy,2020,72:237-249]。然而,这些设备的传感能力和变形能力有限,无法实现对多个场景的多功能传感。同时传统的固固界面摩擦纳米发电机存在循环稳定性差、使用寿命短输出性能较差等一系列问题,难以满足智能可穿戴传感设备快速发展的需求。总之,可连续化制备的基于固液摩擦起电的柔性自驱动多功能传感器件是目前迫切需要而尚未被开发的研究热点。
技术实现要素:
[0004]
本发明所要解决的技术问题是提供一种基于固液摩擦发电的柔性自驱动传感纤维及其制备和应用,克服现有技术中纤维传感器件传感模式单一,稳定性差,电磁屏蔽强,电输出性能低的缺点。
[0005]
本发明的一种柔性自驱动传感纤维,所述柔性自驱动传感纤维包括柔性可拉伸电极皮层、固液界面摩擦电芯层;
[0006]
其中所述柔性可拉伸电极皮层为导电离子水凝胶电极;
[0007]
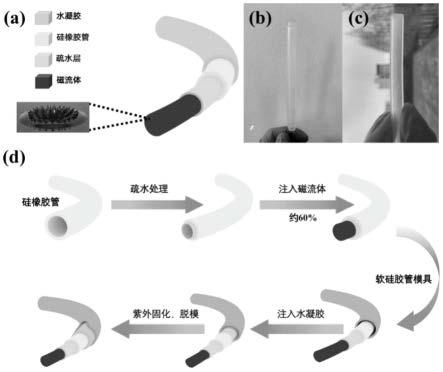
所述固液界面摩擦电芯层包括水基磁流体和内壁疏水的中空聚合物纤维。其结构如说明书附图1a所示。
[0008]
所述离子水凝胶电极材料中含氯盐;其中氯盐为氯化钠nacl、氯化钾kcl、氯化镁mgcl2、氯化钙cacl2中的一种或几种。
[0009]
所述柔性可拉伸电极为离子水凝胶电极,通过添加氯盐调控电导率,选取了兼具
导电性和弱电磁屏蔽性能的合适值,使多功能传感纤维的的电输出性能达最大值。其离子电导率随凝胶中导电离子浓度的提升而提升,选自氯化钠(nacl)、氯化钾(kcl)、氯化镁(mgcl2)、氯化钙(cacl2)中的一种或多种。不同离子化合物兼具导电性和弱电磁屏蔽性能的合适值不同。
[0010]
所述水基磁流体置于内壁疏水的中空聚合物纤维内。
[0011]
所述内壁疏水的聚合物纤维管为中空聚合物纤维内壁设有疏水层;中空聚合物纤维材料为聚偏二氟乙烯三氟乙烯共聚物p(vdf-trfe)、硅酮silicone、聚苯乙烯ps、聚乳酸pla、聚酰胺6pa6、聚氨酯pu中的一种或几种。
[0012]
所述固液界面摩擦电芯层,所述固液界面摩擦电芯层包括水基磁流体和内壁经过疏水处理的中空聚合物纤维,其中聚合物纤维材料需与水基磁流体的摩擦极性配合,用于提升固液摩擦电层之间摩擦电学信号的信噪比,根据摩擦电材料的摩擦序列,选自聚偏二氟乙烯三氟乙烯共聚物(p(vdf-trfe))、硅橡胶(silicone)、聚苯乙烯(ps)、聚乳酸(pla)、聚酰胺6(pa6)、聚氨酯(pu)中的一种或多种;输水涂层可以有效避免磁流体与中空聚合物纤维内壁的粘附,用于提升固液界面摩擦电纤维的稳定性和电输出性能。
[0013]
所述的柔性自驱动多功能传感纤维,所述柔性自驱动多功能传感纤维特性包括:磁场、声场、电场、拉伸、震动等作用下,水基磁流体形态发生变化,出现凸起、聚集、滑动等现象,导致水基磁流体与疏水的中空聚合物纤维内壁发生摩擦电气化效应,从而产生电信号。
[0014]
所述的柔性自驱动多功能传感纤维的电信号测试方法,将柔性自驱动多功能传感纤维固定在线性电机的一侧,另一侧使用一固定磁铁进行受控往复运动,使传感器与磁铁间的距离发生改变,并记录磁铁的运动速度和位移,用电学测试设备连接传感纤维的离子水凝胶电极,用于记录电学数据。其中速度、位移、电学和光学信号能同时被传输至计算机,并实时作图。
[0015]
所述的多功能传感特性,纤维受到磁场、声场、电场、拉伸、震动过程中,会产生电信号,可应用于环境检测和动作定义。具体为:纤维靠近磁场、声场、电场时,随距离的减小或场强的增大,其电输出信号增强;纤维在受到拉伸、震动等力的作用时,随作用力增大,其电输出信号增强。
[0016]
一种基于固液摩擦发电的柔性自驱动多功能传感纤维的连续化制备方法,包括:优化浸渍法制备内壁疏水的聚合物纤维;改进软模具法制备柔性可拉伸电极皮层。其制备流程如说明书附图1d所示。
[0017]
本发明的一种柔性自驱动传感纤维的制备方法,包括:
[0018]
(1)内壁疏水的中空聚合物纤维内注入水基磁流体,密封,得到固液界面的摩擦电芯层;
[0019]
(2)固液界面的摩擦电芯层进行等离子体处理,然后在外部套直径大于摩擦电芯层的中空软管模具,并使摩擦电芯层与软管模具之间存在空隙,接着向空隙中注满液态的离子水凝胶,固化,软管模具剥离,得到柔性自驱动传感纤维。
[0020]
上述制备方法的优选方式如下:
[0021]
所述步骤(1)中内壁疏水的中空聚合物纤维由下列方法制备,包括:将中空的聚合物纤维进行等离子体处理,然后将纤维一端密封,注满质量百分浓度为50%-100%的硅基
超疏水涂层原液,浸渍后倒出,烘干,注满质量百分浓度为2%-5%酸性全氟癸基三甲氧基硅烷乙醇溶液,浸渍后倒出,烘干,获得内壁疏水的聚合物纤维。
[0022]
所述等离子体处理时间为8-20min;所述密封为热熔胶密封;所述浸渍时间均为10-30s;烘干均为50-70℃下烘干3-8min。
[0023]
所述步骤(1)中内壁疏水的中空聚合物纤维内注入体积为40%-90%水基磁流体。
[0024]
所述步骤(2)中液态的离子水凝胶组分为:
[0025]
水、乙二醇、氯盐、n,n
’‑
亚甲基双丙烯酰胺、丙烯酰胺、单宁酸、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮的比例为5-8ml:2-5ml:0.5-2.5g:0.005-0.015g:1.5-2.5g:0.01-0.02g:0.05-0.15g。
[0026]
以配置10ml的离子水凝胶溶液为例,去离子水5-8ml、乙二醇2-5ml、氯盐0.5-2.5g、n,n
’‑
亚甲基双丙烯酰胺0.005-0.015g、丙烯酰胺1.5-2.5g、单宁酸0.01-0.02g、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮0.05-0.15g。
[0027]
所述步骤(2)中等离子体处理时间为8-20min;所述固化紫外固化10-20min,紫外光功率为40kw-60kw。
[0028]
本发明提供一种所述柔性自驱动传感纤维在包括磁场监测、噪音监测、脉搏检测、智能可穿戴人机交互中的应用。
[0029]
进一步地,应用场景,包括所述如(1)磁场监测:通过对磁场的敏感可以在接近强磁场时产生电信号触发警报;(2)噪音监测:通过对声场的敏感可以在噪音分贝过高时产生电信号触发警报;(3)脉搏检测:根据其柔性可制成健康手环,通过对脉搏震动的敏感发出电信号,实现人体脉搏的实时跟踪检测;(4)智能可穿戴人机交互:将多功能传感纤维与衣物集成,基于人体的不同动作导致传感器产生不同的电信号用于电子端口的读取与控制。
[0030]
本发明的柔性多功能传感纤维包括:柔性可拉伸电极皮层和固液界面摩擦电芯层。柔性可拉伸电极皮层由离子水凝胶构成,固液界面摩擦电芯层由水基磁流体和内壁经过疏水处理的聚合物纤维管构成。在磁场、声场、电场、拉伸、震动等作用下,水基磁流体形态发生变化,出现凸起、聚集、滑动等现象,导致水基磁流体与疏水的聚合物纤维管壁之间发生摩擦电气化效应,从而产生电信号,可用于多功能传感器件。本发明基于水基磁流体和中空聚合物纤维材料,采用优化的浸渍法和改进的软模具法,实现了柔性自驱动多功能传感纤维的连续化制备,对多种环境敏感的磁流体材料赋予其多功能实时监测能力,在自驱动多功能传感领域具有良好的应用前景。
[0031]
有益效果
[0032]
本发明基于水基磁流体和中空聚合物纤维材料,基于优化浸渍法和改进软模具法,制备了一种连续化的柔性自驱动多功能传感纤维,具备新颖的磁-电传感模式,可用于高精度环境监测。对多种环境源敏感的磁流体材料赋予其多功能实时监测能力,在自驱动传感领域具有良好的应用前景。
附图说明
[0033]
图1为本发明基于固液摩擦起电的柔性自驱动多功能传感纤维的制备示意图。(a)柔性自驱动多功能传感纤维的结构示意图;(b)改进软模具法制备的柔性可拉伸电极皮层实物图;(c)优化浸渍法制备的内壁疏水的中空聚合物纤维实物图;(d)柔性自驱动多功能
传感纤维的制备流程图。
[0034]
图2实施例1中内壁疏水的中空聚合物纤维和柔性可拉伸电极皮层表征测试。(a)输水处理后的聚合物纤维内壁的sem图;(b)输水处理后的中空聚合物纤维内壁的接触角测试;(c)柔性可拉伸电极包覆中空聚合物纤维的截面图;(d)柔性可拉伸电极在不同拉伸速率下的拉伸性能测试。
[0035]
图3不同电极材料(水凝胶、铜线、导电纱线、银线)制备的多功能传感纤维的电输出性能测试。(a)输出电流测试;(b)输出电荷测试;(c)输出电压测试。
[0036]
图4不同磁场强度下固液摩擦发电的柔性自驱动多功能传感纤维的电输出性能测试。(a)输出电流测试;(b)输出电荷测试;(c)输出电压测试。
[0037]
图5磁场与固液摩擦发电的柔性自驱动多功能传感纤维之间不同距离下的电输出性能测试。(a)输出电流测试;(b)输出电荷测试;(c)输出电压测试。
[0038]
图6不同氯化钠浓度的离子水凝胶电极制备的固液摩擦起电的柔性自驱动多功能传感纤维的电输出性能测试。(a)输出电流测试;(b)输出电荷测试;(c)输出电压测试。
具体实施方式
[0039]
下面结合具体实施例,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。实施例中原料及试剂来源:硅橡胶管(硬度55a,润泽流体)、水基磁流体(饱和磁化强度440高斯,inkking纳米磁流体)、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮(分子量mw=224.25,阿拉丁试剂)、n,n
’‑
亚甲基双丙烯酰胺(分子量mw=54.17,阿拉丁试剂)、单宁酸(分子量mw=701.2,阿拉丁试剂)、全氟癸基三甲氧基硅烷(分子量mw=568.3深蓝试剂)、硅基超疏水涂层(子西莱科技有限公司)、丙烯酰胺(分析纯,泰坦科技)、乙二醇(分析纯,麦克林生化科技有限公司)、氯化钠(分析纯,沪试)。
[0040]
基于固液摩擦发电的柔性自驱动多功能传感纤维的电学输出性能采用吉时利6514a测试,磁场强度用高斯计dx-102f测试。
[0041]
实施例1
[0042]
采用浸渍法制备内壁疏水的聚合物纤维,先将中空的聚合物纤维进行等离子体处理(8min),随后将纤维一端用热熔胶密封,注满浓度为100%的硅基超疏水涂层原液,浸渍一段时间(10s)后倒出,放入70℃烘箱中烘干(3min),接着注满浓度为2%的酸性全氟癸基三甲氧基硅烷乙醇溶液,浸渍一段时间(10s)后倒出,放入70℃烘箱中烘干(3min),获得内壁疏水的聚合物纤维管,最后向中空纤维内注入体积约为60%的水基磁流体,并用热熔胶进行密封,获得固液界面的摩擦电芯层。取去离子水7ml与乙二醇3ml混合,加入氯化钠1.0g、n,n
’‑
亚甲基双丙烯酰胺0.01g、丙烯酰胺2.13g、单宁酸0.015g、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮0.1g,配成离子水凝胶溶液。采用软模具法制备柔性可拉伸电极皮层,对固液界面的摩擦电芯层进行等离子体处理(8min),随后在外部套一直径大于摩擦电芯层的中空软管模具,并使摩擦电芯层与软管模具之间存在一定的空隙,接着向空隙中注满液态的离子水凝胶,然后放入紫外固化箱(60kw)中进行紫外固化(10min),最后将软管模具剥离,获得柔性可拉伸电极皮层。将制备得到的多功能传感纤维按说明书中柔性自驱动多功
能传感纤维的电信号测试方法进行电学信号测试,控制纤维与磁场间的距离为5mm、磁场强度为2.5kg、电极材料分别为氯化钠水凝胶电极、铜线、导电纱线和银线其电学信号如图3所示。氯化钠水凝胶电极制备的多功能传感纤维电流输出达到80μa/m2、电荷输出达到0.05nc、电压输出达到0.3v,相比于其他传统电极材料制备的多功能传感纤维性能大幅度提升。
[0043]
实施例2
[0044]
采用浸渍法制备内壁疏水的中空聚合物纤维,先将中空的聚合物纤维进行等离子体处理(10min),随后将纤维一端用热熔胶密封,注满浓度为50%的硅基超疏水涂层原液,浸渍一段时间(15s)后倒出,放入65℃烘箱中烘干(4min),接着注满浓度为3%的酸性全氟癸基三甲氧基硅烷乙醇溶液,浸渍一段时间(15s)后倒出,放入65℃烘箱中烘干(4min),获得内壁疏水的中空聚合物纤维管,最后向中空纤维内注入体积约为40%水基磁流体,并用热熔胶进行密封,获得固液界面的摩擦电芯层。取去离子水5ml与乙二醇5ml混合,加入氯化钠1.0g、n,n
’‑
亚甲基双丙烯酰胺0.005g、丙烯酰胺1.5g、单宁酸0.01g、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮0.05g,配成离子水凝胶溶液。采用软模具法制备柔性可拉伸电极皮层,对固液界面的摩擦电芯层进行等离子体处理(10min),随后在外部套一直径大于摩擦电芯层的中空软管模具,并使摩擦电芯层与软管模具之间存在一定的空隙,接着向空隙中注满液态的离子水凝胶,然后放入紫外固化箱(50kw)中进行紫外固化(12min),最后将软管模具剥离,获得柔性可拉伸电极皮层。将制备得到的多功能传感纤维按说明书中柔性自驱动多功能传感纤维的电信号测试方法进行电学信号测试,控制纤维与磁场间的距离为5mm、水凝胶电极的氯化钠浓度为0.1g/ml、磁场强度分别为0.5kg、1.5kg、2.5kg,其电学信号如图4所示。随磁场强度增大,多功能传感纤维的电输出性能增强,当磁场强度为2.5kg时,多功能传感纤维的输出电流为120μa/m2、输出电荷为0.2nc、输出电压为0.45v,表现出多功能传感纤维对磁场强度敏感的特性。
[0045]
实施例3
[0046]
采用浸渍法制备内壁疏水的中空聚合物纤维,先将中空的聚合物纤维进行等离子体处理(14min),随后将纤维一端用热熔胶密封,注满浓度为70%的硅基超疏水涂层原液,浸渍一段时间(20s)后倒出,放入60℃烘箱中烘干(5min),接着注满浓度为4%的酸性全氟癸基三甲氧基硅烷乙醇溶液,浸渍一段时间(20s)后倒出,放入60℃烘箱中烘干(5min),获得内壁疏水的中空聚合物纤维,最后向中空纤维内注入体积约为70%的水基磁流体,并用热熔胶进行密封,获得固液界面的摩擦电芯层。取去离子水6ml与乙二醇4ml混合,加入氯化钠1.0g、n,n
’‑
亚甲基双丙烯酰胺0.008g、丙烯酰胺1.8g、单宁酸0.013g、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮0.08g,配成离子水凝胶溶液。采用软模具法制备柔性可拉伸电极皮层,对固液界面的摩擦电芯层进行等离子体处理(14min),随后在外部套一直径大于摩擦电芯层的中空软管模具,并使摩擦电芯层与软管模具之间存在一定的空隙,接着向空隙中注满液态的离子水凝胶,然后放入紫外固化箱(50kw)中进行紫外固化(15min),最后将软管模具剥离,获得柔性可拉伸电极皮层。将制备得到的多功能传感纤维按说明书中柔性自驱动多功能传感纤维的电信号测试方法进行电学信号测试,控制水凝胶电极的氯化钠浓度为0.1g/ml、磁场强度为2.5kg、纤维与磁场间的距离分别为5mm、10mm、15mm、20mm、25mm,其电学信号如图5所示。随多功能传感纤维与磁场强度恒定的磁场间的距离减小,多功能传感纤
维的电输出性能增强,当与磁场距离为5mm时多功能传感纤维的输出电流为75μa/m2、输出电荷为0.055nc、输出电压为0.3v,表现出多功能传感纤维对与磁场间距离磁场敏感的特性。
[0047]
实施例4
[0048]
采用浸渍法制备内壁疏水的中空聚合物纤维,先将中空的聚合物纤维进行等离子体处理(20min),随后将纤维一端用热熔胶密封,注满浓度为90%的硅基超疏水涂层原液,浸渍一段时间(30s)后倒出,放入50℃烘箱中烘干(8min),接着注满浓度为5%的酸性全氟癸基三甲氧基硅烷乙醇溶液,浸渍一段时间(30s)后倒出,放入50℃烘箱中烘干(8min),获得内壁疏水的中空聚合物纤维,最后向中空纤维内注入体积约为90%的水基磁流体,并用热熔胶进行密封,获得固液界面的摩擦电芯层。取去离子水9ml与乙二醇1ml混合,分别加入氯化钠0.5g、1.0g、1.5g、2.0g,再分别加入n,n
’‑
亚甲基双丙烯酰胺0.015g、丙烯酰胺2.5g、单宁酸0.02g、2-羟基-4
’‑
(2-羟乙氧基)-2-甲基苯丙酮0.015g,配成不同氯化钠离子水凝胶溶液。采用软模具法制备柔性可拉伸电极皮层,对固液界面的摩擦电芯层进行等离子体处理(20min),随后在外部套一直径大于摩擦电芯层的中空软管模具,并使摩擦电芯层与软管模具之间存在一定的空隙,接着向空隙中注满液态的离子水凝胶,然后放入紫外固化箱(40kw)中进行紫外固化(20min),最后将软管模具剥离,获得柔性可拉伸电极皮层。将制备得到的多功能传感纤维按说明书中柔性自驱动多功能传感纤维的电信号测试方法进行电学信号测试,控制磁场强度为2.5kg、纤维与磁场间的距离为5mm、水凝胶电极的氯化钠浓度分别为0.05g/ml、0.10g/ml、0.15g/ml、0.20g/ml,其电学信号如图6所示。离子水凝胶电极的导电性能随氯化钠浓度增加而增大,而其电输出性能随氯化钠浓度增加先增大后减小,原因是氯化钠浓度增大同时也增强了水凝胶电极的电磁屏蔽效应,为了使多功能传感纤维的电输出性能最大化,需要通过调节合适的氯化钠浓度使水凝胶电极兼具导电性和弱电磁屏蔽效应,当氯化钠浓度为0.15g/ml时多功能传感纤维的电输出性能最好,输出电流为80μa/m2、输出电荷为0.07nc、输出电压为0.35v。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1