一种光伏系统的分布式调相机相位补偿方法及系统与流程
1.本发明涉及调相机控制技术领域,特别是涉及一种光伏系统的分布式调相机相位补偿方法及系统。
背景技术:
2.目前光伏接入系统容量的不断增大,由于其特殊的电力电子结构减弱了电网的稳定性,且增加了电网宽频振荡的风险。光伏大量接入电网的稳定性问题受到电力生产者和研究者的高度重视。为提高大量光伏接入电网电压稳定性,在光伏接入地区配置分布式调相机用以提升电网电压稳定性。
3.分布式调相机的接入提升了高比例光伏系统的短路容量比和暂态电压稳定性,但对低频稳定性的提升基本作用不大。现有的分布式调相机研究主要有以下几类,一是提升系统的暂态电压扰动能力。该方面研究主要是考虑调相机的暂态无功支撑能力。二是调相机的参数优化,研究调相机参数对稳定性的影响。目前的分布式调相机在运行范围内本体提供的阻尼极为有限,而仅依靠暂态q轴电动势变化给电网输出阻尼是远远不足的。
技术实现要素:
4.为了解决上述技术问题,本发明的目的是提供一种充分利用现有分布式调相机的结构,通过分析分布式调相机附加阻尼控制器传递函数与光伏系统阻尼转矩间的关系,能够实现光伏和分布式调相机并列系统的相位补偿,增强光伏系统阻尼值的光伏系统的分布式调相机的相位补偿方法及系统。
5.第一方面,本发明第一实施例提供了一种光伏系统的分布式调相机的相位补偿方法,所述方法包括:
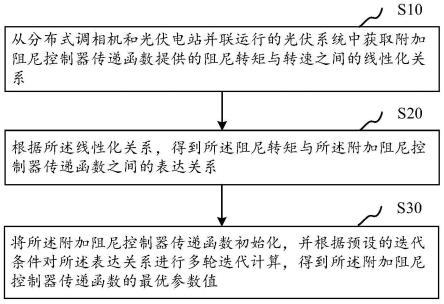
6.从分布式调相机和光伏电站并联运行的光伏系统中获取附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系;
7.根据所述线性化关系,得到所述阻尼转矩与所述附加阻尼控制器传递函数之间的表达关系;
8.将所述附加阻尼控制器传递函数初始化,并根据预设的迭代条件对所述表达关系进行多轮迭代计算,得到所述附加阻尼控制器传递函数的最优参数值。
9.进一步地,所述从分布式调相机和光伏电站并联运行的光伏系统中获取附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系的具体步骤包括:
10.获取系统有功功率与系统等值电动势之间的第一线性化关系;
11.获取所述系统等值电动势与附加阻尼控制器传递函数之间的第二线性化关系;
12.根据所述第一线性化关系和所述第二线性化关系,得到所述附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系。
13.进一步地,采用如下公式计算所述第一线性化关系:
[0014][0015]
式中,p
equ
为系统有功功率,u
t
为机端电压,x
equ
为内部阻抗,δ
equ
为系统功角,带0下标的变量是对应变量的稳态值,带有
△
的变量为对应变量的增量;
[0016]
采用如下公式计算所述第二线性化关系:
[0017][0018]
式中,e
equ
为系统等值电动势,i
con
为分布式调相机电流,e
pv
为光伏电站等值电动势,x
equ
为内部阻抗,δ
equ
为系统功角,φs为光伏电站的功率因数角,ka为分布式调相机的电压调节器的放大倍数,x
′
con
为分布式调相机d轴暂态阻抗,xs为系统等值电抗,ta为分布式调相机的励磁时间常数,t
′
d0
为分布式调相机在定子开路时的励磁绕组时间常数,x
con
为分布式调相机d轴电抗,u
t
为机端电压,g
eθ
(s)为光伏有功模块传递函数,g
damp
(s)为附加阻尼控制器传递函数,s为拉普拉斯算子,s=jωd,j为虚数单位,ωd为角频率变量,δω为δ
equ
对应的虚拟转速,a1为放大倍数,τ为延迟时间常数,u
td
为u
t
的d轴分量,u
tq
为u
t
的q轴分量,xd为系统等值d轴电抗,xq为系统等值q轴电抗,u为无穷大母线电压,
[0019]
其中,
[0020][0021][0022][0023][0024][0025][0026][0027]keu
=[δu
t0-i
equ0
x
equ
cos(δ
equ-φs)0]/e
equ0
[0028]keφ1
=i
equ0ut0
x
equ
sin(δ
equ-φs)0/e
equ0
[0029][0030]keδ1
=i
equ0ut0
x
equ
sin(δ
equ-φs)0/e
equ0
[0031]
进一步地,采用如下公式计算所述阻尼值与所述附加阻尼控制器传递函数之间的表达关系:
[0032][0033][0034]
式中,g
damp
(s)为附加阻尼控制器传递函数,s为拉普拉斯算子,mg为传递函数提供的阻尼值,im为传递函数求虚部函数,i
con
为分布式调相机电流,e
pv
为光伏电站等值电动势,x
equ
为内部阻抗,δ
equ
为系统功角,φs为光伏电站的功率因数角,ka为分布式调相机的电压调节器的放大倍数,x
′
con
为分布式调相机d轴暂态阻抗,xs为系统等值电抗,ta为分布式调相机的励磁时间常数,t
′
d0
为分布式调相机在定子开路时的励磁绕组时间常数,x
con
为分布式调相机d轴电抗。
[0035]
进一步地,所述将所述附加阻尼控制器传递函数初始化的具体步骤包括:
[0036]
根据预设初值对系统有功功率和系统无功功率分别进行初始化,得到传递函数初值、有功功率初值和无功功率初值;
[0037]
根据所述有功功率初值和所述无功功率初值,得到分布式调相机电流初值、光伏电站等值电动势初值、系统功角初值以及光伏电站的功率因数角初值。
[0038]
进一步地,所述预设的迭代条件包括预设的迭代步长和预设的最大迭代次数,所述最大迭代次数包括角频率最大迭代次数、系统有功功率最大迭代次数、系统无功功率最大迭代次数、延迟时间常数最大迭代次数和放大倍数最大迭代次数。
[0039]
进一步地,所述根据预设的迭代条件对所述表达关系进行多轮迭代计算的具体步骤包括:
[0040]
根据预设的所述角频率最大迭代次数,对所述表达关系进行迭代计算,将阻尼值为最小值的所述表达关系作为第一表达关系;
[0041]
根据预设的所述系统有功功率最大迭代次数和所述系统无功功率最大迭代次数,对所述第一表达关系进行迭代计算,将所述阻尼值为最大值的所述第一表达关系作为第二表达关系;
[0042]
根据预设的所述延迟时间常数最大迭代次数,对所述第二表达关系进行迭代计算,将所述阻尼值为最大值的所述第二表达关系作为第三表达关系;
[0043]
根据预设的所述放大倍数最大迭代次数,对所述第三表达关系进行迭代计算,将所述阻尼值为最大值的所述第三表达关系作为第四表达关系。
[0044]
进一步地,所述得到所述附加阻尼控制器传递函数的最优参数值的具体步骤包括:
[0045]
根据所述第四表达关系,得到延迟时间常数和放大倍数分别对应的第一迭代次数和第二迭代次数;
[0046]
根据预设的最优参数表达式、所述第一迭代次数和所述第二迭代次数,得到延迟时间常数最优值和放大倍数最优值。
[0047]
进一步地,采用如下公式计算所述最优参数表达式:
[0048]
τ
opt
=0.05+(jmax-1)*0.01
[0049]aopt
=1+(imax-1)*0.1
[0050]
式中,τ
opt
为延迟时间常数最优值,a
opt
为放大倍数最优值,jmax为第一迭代次数,imax为第二迭代次数。
[0051]
第二方面,本发明第二实施例提供了一种光伏系统的分布式调相机的相位补偿系统,包括:
[0052]
线性化关系获取模块,用于从分布式调相机和光伏电站并联运行的光伏系统中获取附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系;
[0053]
表达关系获取模块,用于根据线性化关系,得到所述阻尼转矩与所述附加阻尼控制器传递函数之间的表达关系;
[0054]
最优参数值获取模块,用于将所述附加阻尼控制器传递函数初始化,并根据预设的迭代条件对所述表达关系进行多轮迭代计算,得到所述附加阻尼控制器传递函数的最优参数值。
[0055]
上述本发明提供了一种光伏系统的分布式调相机的相位补偿方法及系统,通过所述方法,充分利用现有分布式调相机的结构,分析分布式调相机附加阻尼控制器传递函数与光伏系统阻尼转矩间的关系,本发明能够解决现有分布式调相机阻尼提供较弱的问题,增强了光伏系统的阻尼值,为电力系统实际安全提供了一种阻尼优化配置计算方法,提高了高比例光伏系统运行和维护的可靠性和可控性,这对于现有的调相机控制技术领域来说是非常有意义的。
附图说明
[0056]
图1是本发明实施例提供的光伏系统的分布式调相机相位补偿方法的流程示意图;
[0057]
图2是本发明实施例提供的含调相机的光伏电站示意图;
[0058]
图3是图2中的光伏电站的示意图;
[0059]
图4是图2中分布式调相机模型的等值模型;
[0060]
图5是本发明实施例提供的分布式调相机和光伏电站并联等值模型;
[0061]
图6是图1中步骤s10的流程示意图;
[0062]
图7是本发明实施例提供的并联等值模型和光伏电动势以及调相机定子电流的关系示意图;
[0063]
图8是图1中步骤s30的流程示意图;
[0064]
图9是图1中步骤s30的另一种流程示意图;
[0065]
图10是图1中步骤s30的第三种流程示意图;
[0066]
图11是本发明实施例提供的光伏系统的分布式调相机相位补偿系统的结构示意图。
具体实施方式
[0067]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员
在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0068]
请参阅图1,本发明实施例提出的一种光伏系统的分布式调相机的相位补偿方法,包括步骤s10~s30:
[0069]
步骤s10,从分布式调相机和光伏电站并联运行的光伏系统中获取附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系。
[0070]
在此先对本实施例中涉及到的系统及参数进行说明,以便后续对于参数的计算和使用,如图2所示的含调相机的光伏电站示意图中,光伏发电单元通过箱变升压至光伏母线,光伏母线通过光伏主变升压至公共母线,调相机回路则通过调相机主变升压至公共母线,光伏电站和调相机的功率通过公共母线和出线流至等值系统内。
[0071]
如图3所示的为图2中光伏电站等值示意图,光伏等值为电压源e
pv
驱动的串联电路,其中,光伏电站的等值电动势为e
pv
,光伏内部阻抗为x
pv
,光伏的有功为p
pv
,光伏的无功为q
pv
,光伏的电流为i
pv
,光伏的机端电压为u
t
。光伏的的功角为δ
pv
,j为单位复数。u为无穷大母线电压,xs为图2中等值系统的电抗。需要说明的是,本实施例中将光伏的升压变和箱变的阻抗等值后包含在内部阻抗内,与现有的电力系统一般将升压变参数排除在机端电压之外有所区别,在后续的计算中将不再一一赘述。
[0072]
如图4所示的为图2中分布式调相机模型的等值模型,分布式调相机等值为电压源e
′
con
驱动的串联电路,其中分布式调相机等值电动势为e
′
con
,分布式调相机d轴暂态阻抗为x
′
con
,分布式调相机的无功为q
con
,分布式调相机的电流为i
con
,分布式调相机的机端电压为u
t
,分布式调相机的机端电压与光伏系统的机端电压相同。
[0073]
由于图2中描述了分布式调相机和光伏的并列运行结构,将图3中的光伏电站和图4中的分布式调相机模型合并为混合等值模型,就得到了如图5所示的分布式调相机和光伏并联等值模型,分布式调相机和光伏的并列后的混合等值为电压源e
equ
驱动的串联电路,其中,混合等值模型的电动势为e
equ
,混合等值模型的内部阻抗为x
equ
,混合等值模型的无功为q
equ
,混合等值模型的有功为p
equ
,混合等值模型的电流为i
equ
,混合等值模型的机端电压为u
t
。φs为光伏的功率因数角。混合等值模型的功角为δ
equ
。注意此处的混合等值模型即可理解为本实施例中的分布式调相机和光伏电站并联运行的光伏系统,后续将不再一一说明。
[0074]
基于上述模型,我们可以对模型中的参数关系进行推导和计算,从而得到附加阻尼控制器传递函数提供的阻尼转矩与转速的关系,具体步骤如图6所示:
[0075]
步骤s101,获取系统有功功率与系统等值电动势之间的第一线性化关系。
[0076]
步骤s102,获取所述系统等值电动势与附加阻尼控制器传递函数之间的第二线性化关系。
[0077]
步骤s103,根据所述第一线性化关系和所述第二线性化关系,得到所述附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系。
[0078]
下面我们对整个推导和计算过程进行详细描述,应当注意的是,计算过程中涉及到的参数可参见上述参数释义,在后续计算中将不再一一重复说明。
[0079]
根据图5所示,我们可以得到系统有功功率的表达关系如以下公式(1)所示:
[0080][0081]
对公式(1)进行线性化可得公式(2)为:
[0082][0083]
公式(2)即为系统有功功率与系统等值电动势之间的第一线性化关系,其中,带0下标的变量是对应变量的稳态值,带有δ的变量为对应变量的增量。
[0084]
从式(2)可以看出,混合等值模型的阻尼转矩有两部分提供,一部分是该部分由光伏的有功特性决定,实际光伏在发电时,有功指令是由调度下令给定的,无法进行调节,所以该部分的阻尼特性为不可控的。另外一部分为该部分可以通过调整无功改变δe
equ
的幅值。
[0085]
将图5所示的模型e
equ
做dq分解,q轴方向与e
equ
关系相同,d轴与q轴垂直,可以得出如下关系:
[0086]
ucosδ
equ
=e
equ-id(xd+xs)
……
(3)
[0087]
usinδ
equ
=iq(xq+xs)
……
(4)
[0088]
其中:id为i
equ
的d轴分量,iq为i
equ
的q轴分量。xd为混合等值模型d轴电抗,xq为混合等值模型q轴电抗。
[0089]
同样的,对机端电压u
t
做dq分解,得出对应的表达式为:
[0090]utd
=iqxq……
(5)
[0091]utq
=e
equ-idxd……
(6)
[0092][0093]
其中:u
td
为u
t
的d轴分量,u
tq
为u
t
的q轴分量。
[0094]
对公式(5)、(6)、(7)分别线性化可以得到:
[0095]
δu
t
=k
uδ
δδ
equ
+k
ue
δe
equ
……
(8)
[0096]
其中:
[0097][0098]
定义u
t
和u之间的夹角为φs,即光伏的功率因数角,则φs的表达式如下所示:
[0099][0100]
假定u为恒定量,对公式(9)进行线性化可得:
[0101][0102]
根据公式(10)可以得到δφs的表达式为:
[0103]
δφs=k
uφ
δu
t
+k
iφ
δi
equ
……
(11)
[0104]
其中:
[0105]
[0106]
综合图3、图4和图5可以得到如图7所示的混合等值模型和光伏电动势以及调相机定子电流的关系示意图,根据图7和余弦定理,可以计算出e
equ
的表达式为:
[0107][0108]
对公式(12)进行线性化可以得到:
[0109]
δe
equ
=k
ee
δe
pv
+k
eδ
δδ
equ
+k
eφ
δφs+k
eic
δi
con
……
(13)
[0110]
其中:
[0111]kee
=(e
pv0-i
con0ut0
x
′
con
cos(δ
equ-φs)0)/e
equ0
,e
eδ
=i
con0epv0
x
′
con
sin(δ
equ-φs)0/e
equ0keφ
=-i
con0epv0
x
′
con
sin(δ
equ-φs)0/e
equ0
,
[0112][0113]
从公式(13)可以看到,δe
equ
主要由两部分组成,第一部分主要由光伏的δe
pv
组成,δe
pv
主要由光伏参数、结构和状态变量组,和分布式调相机无关,而第二部分主要由分布式调相机的δi
con
组成,该部分是分布式调相机的电流,可以在该部分设计附加阻尼控制器,因此,本实施例主要对第二部分进行计算,但是这一部分与混合等值机的功角无关,因此需要将其转化为功角的表达式,才便于进行下一步的阻尼转矩的计算。
[0114]
根据图5可以得到:
[0115][0116]
对公式(14)进行线性化可以得到:
[0117]
δe
equ
=k
eu
δu
t
+k
eδ1
δδ
equ
+k
eφ1
δφs+k
ei
δi
equ
……
(15)
[0118]
其中:
[0119]keu
=[δu
t0-i
equ0
x
equ
cos(δ
equ-φs)0]/e
equ0
[0120]keδ1
=i
equ0ut0
x
equ
sin(δ
equ-φs)0/e
equ0
[0121]keφ1
=i
equ0ut0
x
equ
sin(δ
equ-φs)0/e
equ0
[0122][0123]
将公式(11)代入公式(15),可以得到δi
equ
的表达式如下所示:
[0124][0125]
将公式(8)代入公式(16)中,可以得到:
[0126][0127]
根据公式(8)、(11)和(17)可以得出δφs与δδ
equ
、δe
equ
的关系:
[0128]
δφs=k
uφ
δu
t
+k
iφ
δi
equ
[0129]
δu
t
=k
uδ
δδ
equ
+k
ue
δe
equ
[0130]
δφs=k
φδ
δδ
equ
+k
φe
δe
equ
……
(18)
[0131]
其中,
[0132]
[0133][0134]
根据图4所示的分布式调相机等值模型可以得出i
con
的表达式:
[0135]icon
=(e
′
con-u
t
)/x
′
con
……
(19)
[0136]
对公式(19)进行线性化可得:
[0137]
δi
con
=(δe
′
con-δu
t
)/x
′
con
……
(20)
[0138]
调相机的动态模型可以使用如下表达式所示:
[0139][0140]
其中,t
′
d0
为调相机在定子开路时的励磁绕组时间常数,x
con
为调相机d轴电抗,e
fd
为调相机励磁电压。
[0141]
我们将含有励磁和附加阻尼的模型写入公式(21)中,可得:
[0142][0143]
其中,g
damp
(s)为附加阻尼控制器传递函数,s为拉普拉斯算子,s一般可以写为s=jωd,j为虚数单位,ωd为角频率变量,δω为δ
equ
对应的虚拟转速,对应的表达式如下所示:
[0144][0145]
式中:a1为放大倍数,τ为延迟时间常数。
[0146]
将公式(8)、(22)代入公式(20)中可以得到:
[0147][0148]
其中,ka为分布式调相机的电压调节器的放大倍数,ta为分布式调相机的励磁时间常数。
[0149]
将公式(24)、(18)代入公式(14)可以得到:
[0150][0151]
而根据现有的技术,可以将光伏的δe
pv
用δδ
equ
代替,将公式(25)转化为:
[0152][0153]
其中,g
eθ
(s)为光伏有功模块传递函数。
[0154]
将公式(26)重新整理后可得:
[0155][0156]
公式(27)即为系统等值电动势与阻尼控制器传递函数之间的第二线性化关系,从公式(27)可以看出,改变g
damp
(s)参数,可以改变δe
equ
的幅值和相位,再结合公式(2)可以得出,如果改变g
damp
参数,就可以改变δp
equ
的幅值和相位,当δp
equ
投影在δω轴为正时,说明δp
equ
提供正阻尼,当δp
equ
投影在δω轴为负时,说明δp
equ
提供负阻尼,从而可以得到系统有功功率与附加阻尼控制器传递函数g
damp
(s)之间的关系,也就是说,通过上述计算我们可以得到阻尼与g
damp
(s)是具有表达关系的。
[0157]
步骤s20,根据所述线性化关系,得到阻尼值与所述附加阻尼控制器传递函数之间的表达关系。
[0158]
通过上述的公式(27)可以得到g
damp
(s)提供的阻尼值:
[0159][0160]
通过公式(28)可知,当改变g
damp
(s)参数时,会得到不同的阻尼值,因此,可以通过提取g
damp
(s)的最优参数来增强光伏系统的阻尼值。
[0161]
步骤s30,将所述附加阻尼控制器传递函数初始化,并根据预设的迭代条件对所述表达关系进行多轮迭代计算,得到所述附加阻尼控制器传递函数的最优参数值。
[0162]
对于g
damp
(s)参数的最优值的提取过程,首先需要对g
damp
(s)进行初始化,具体步骤如图8所示:
[0163]
步骤s301,根据预设初值对系统有功功率和系统无功功率分别进行初始化,得到传递函数初值、有功功率初值和无功功率初值;
[0164]
步骤s302,根据所述有功功率初值和所述无功功率初值,得到分布式调相机电流初值、光伏电站等值电动势初值、系统功角初值以及光伏电站的功率因数角初值。
[0165]
在最优参数提取过程中,首先对g
damp
(s)、p
equ
和q
equ
进行初始化,应当注意的是,本实施例中的预设的初始化值只是优选而非具体限定,具体初值可以根据实际情况灵活设置,在此不再一一赘述。
[0166]
对g
damp
(s)中的各个参数以及p
equ
和q
equ
设置的初值为:
[0167]
a1(0)=1,τ(0)=0.05,s(0)=j1.26,p
equ
(0)=0.01,q
equ
(0)=0.01
[0168]
并且为了后续计算,还设置了其他参数的初值如下所示:
[0169]ut
=1.02,u=1,xs=0.05,x
pv
=0.2
[0170]
根据前文所述的模型以及公式,可以得到如下所示的表达式:
[0171][0172][0173][0174][0175][0176][0177]
根据上述的初值和表达式,可以计算出i
con
(0)、e
pv0
(0)、δ
equ
(0)和φs(0)的初值,并将初值代入到公式(28)中,从而计算出g
damp
(s)提供的阻尼初值:
[0178][0179][0180]
其中,im为传递函数求虚部函数。
[0181]
在对阻尼值进行初始化之后,需要对初始化后的表达式进行迭代计算,在此,优选的将迭代步长设置为:
[0182]
a1(i)=a1(i-1)+0.1
[0183]
τ(j)=τ(j-1)+0.01
[0184]
s(n)=s(n-1)+0.06
[0185]
p
equ
(k)=p
equ
(k-1)+0.01
[0186]qequ
(k)=q
equ
(k-1)+0.01
[0187]
其中,i,j,n,k分别为参数a1、τ、s、p
equ
和q
equ
的迭代次数。
[0188]
进一步地,可以得到阻尼值的迭代表达式为:
[0189]
[0190][0191]
根据上述的迭代步长和迭代次数,对上述的迭代表达式进行迭代计算,具体步骤如图9所示:
[0192]
步骤s303,根据预设的所述角频率最大迭代次数,对所述表达关系进行迭代计算,将阻尼值为最小值的所述表达关系作为第一表达关系;
[0193]
步骤s304,根据预设的所述系统有功功率最大迭代次数和所述系统无功功率最大迭代次数,对所述第一表达关系进行迭代计算,将所述阻尼值为最大值的所述第一表达关系作为第二表达关系;
[0194]
步骤s305,根据预设的所述延迟时间常数最大迭代次数,对所述第二表达关系进行迭代计算,将所述阻尼值为最大值的所述第二表达关系作为第三表达关系;
[0195]
步骤s306,根据预设的所述放大倍数最大迭代次数,对所述第三表达关系进行迭代计算,将所述阻尼值为最大值的所述第三表达关系作为第四表达关系。
[0196]
本实施例中的迭代计算是对上述的参数a1、τ、s、p
equ
和q
equ
分别进行迭代计算,并优选的对各个参数的迭代次数设置具体的迭代值,应当注意的是,本实施例中的具体数值只是一种优选的方案而非具体限定。
[0197]
首先,对参数s进行迭代n次计算,由于s=jωd,也就是说n实际上是角频率ωd的迭代次数,n=n+1,令n从0循环到24,计算得到m
gmin
(i,j,k)=min(mg(i,j,k,0),mg(i,j,k,1),
…
mg(i,j,k,24))的值;
[0198]
其次,对参数p
equ
和q
equ
进行k次迭代计算,k=k+1,令k从0循环到100,计算得到m
mmax
=max(m
gmin
(i,j,0),m
gmin
(i,j,1),
…mgmin
(i,j,100))的值;
[0199]
第三,对参数τ进行迭代j次计算,j=j+1,令j从0循环到200,计算得到m
taomax
=max(m
mmax
(i,0),m
mmax
(i,1),
…mmmax
(i,200))的值;
[0200]
最后,对参数a1进行迭代i次计算,i=i+1,令i从0循环至200,计算得到m
amax
=max(m
taomax
(0),m
taomax
(1),
…mtaomax
(200))的值。
[0201]
通过上面的嵌套迭代,可以得到最优参数对应的迭代表达式,然后通过该迭代表达式来获取参数的最优值,具体步骤如图10所示:
[0202]
步骤s307,根据所述第四表达关系,得到延迟时间常数和放大倍数分别对应的第一迭代次数和第二迭代次数;
[0203]
步骤s308,根据预设的最优参数表达式、所述第一迭代次数和所述第二迭代次数,得到延迟时间常数最优值和放大倍数最优值。
[0204]
通过上述迭代计算得到m
amax
后,可以在mg中找到m
amax
的位置,假设m
amax
对应的位置为(imax,jmax,kmax,nmin),根据对应的位置即可找出对应的最优参数,其中,最优参数的表达式为:
[0205]
τ
opt
=0.05+(jmax-1)*0.01
[0206]aopt
=1+(imax-1)*0.1
[0207]
式中,τ
opt
为延迟时间常数最优值,a
opt
为放大倍数最优值,jmax为m
amax
中参数τ的迭代次数,imax为m
amax
中参数a1的迭代次数。
[0208]
通过上述的参数最优值,得到传递函数g
damp
的值,从而通过公式(28)得到了光伏
系统的阻尼值,很明显的,通过本实施例得到的阻尼值是一种增强的阻尼值,从而实现了光伏和分布式调相机并列系统的相位补偿。
[0209]
请参阅图11,基于同一发明构思,本发明第二实施例提出的一种光伏系统的分布式调相机的相位补偿系统,包括:
[0210]
线性化关系获取模块10,用于从分布式调相机和光伏电站并联运行的光伏系统中获取附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系;
[0211]
表达关系获取模块20,用于根据线性化关系,得到所述阻尼转矩与所述附加阻尼控制器传递函数之间的表达关系;
[0212]
最优参数值获取模块30,用于将所述附加阻尼控制器传递函数初始化,并根据预设的迭代条件对所述表达关系进行多轮迭代计算,得到所述附加阻尼控制器传递函数的最优参数值。
[0213]
本发明实施例提出的一种光伏系统的分布式调相机的相位补偿系统的技术特征和技术效果与本发明实施例提出的方法相同,在此不予赘述。上述光伏系统的分布式调相机的相位补偿系统中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0214]
综上,本发明实施例提出的一种光伏系统的分布式调相机的相位补偿方法,所述方法通过从分布式调相机和光伏电站并联运行的光伏系统中获取附加阻尼控制器传递函数提供的阻尼转矩与转速之间的线性化关系;根据所述线性化关系,得到所述阻尼转矩与所述附加阻尼控制器传递函数之间的表达关系;将所述附加阻尼控制器传递函数初始化,并根据预设的迭代条件对所述表达关系进行多轮迭代计算,得到所述附加阻尼控制器传递函数的最优参数值。本发明充分利用了现有分布式调相机的结构,分析了分布式调相机附加阻尼控制器传递函数与光伏系统阻尼转矩间的关系,能够解决现有分布式调相机阻尼提供较弱的问题,增强了光伏系统的阻尼值,为电力系统实际安全提供了一种阻尼优化配置计算方法,提高了高比例光伏系统运行和维护的可靠性和可控性。
[0215]
本说明书中的各个实施例均采用递进的方式描述,各个实施例直接相同或相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于系统实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。需要说明的是,上述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0216]
以上所述实施例仅表达了本技术的几种优选实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本技术的保护范围。因此,本技术专利的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1