三相四开关直流无刷电机空间电压矢量的控制电路及方法
1.本发明属于交直交变频器技术领域,涉及一种三相四开关直流无刷电机空间电压矢量的控制电路及方法。
背景技术:
2.直流电机具有良好的调速特性、简单的控制特性、优秀的动态特性,所以被广泛应用在各种驱动装置和伺服系统中。但是,直流电动机采用了电刷和换向器,这阻碍了其发展。随着电子技术、功率元件技术和高性能的磁性材料制造技术的飞速发展,无刷直流电动机利用电子换向器取代了机械电刷和机械换向器。这种电机不但保留了直流电机的优势,又有交流电动机的结构简单、运行可靠、维护方便等优点,直流无刷电动机一出现就以极快的速度发展和普及。但是目前无刷直流电机的控制系统电路设计较为复杂,系统的可靠性低,一定程度上阻碍了无刷直流电机的发展。
技术实现要素:
3.本发明的目的是提供一种三相四开关直流无刷电机空间电压矢量的控制电路及方法,针对采用四开关控制的直流无刷电机控制中的转矩脉动大的问题,基于八个矢量可以更好的减少四开关直流无刷电机的转矩脉动。
4.本发明的技术方案如下。
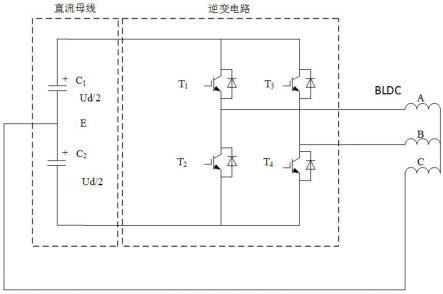
5.一种三相四开关直流无刷电机空间电压矢量的控制电路,包括逆变电路、直流母线电路和三相直流无刷电机,逆变电路包括绝缘栅双极型晶体管t1、绝缘栅双极型晶体管t2、绝缘栅双极型晶体管t3、绝缘栅双极型晶体管t4,直流母线电路包括电容c1、电容c2,逆变电路分别与电源和负载相连,直流电源输出端与直流母线电路相接,逆变电路的输出端与三相直流无刷电机的a、b两相相连,直流母线电路中电容c1、电容c2的中性点e与电机第三相c连接;绝缘栅双极型晶体管t1、绝缘栅双极型晶体管t3和电容c1的一端连接,电容c1的另一端与电容c2的一端连接,电容c2的另一端与绝缘栅双极型晶体管t2、绝缘栅双极型晶体管t4连接,且绝缘栅双极型晶体管t1与绝缘栅双极型晶体管t2连接,绝缘栅双极型晶体管t3与绝缘栅双极型晶体管t4连接。
6.所述电容c1和电容c2的容量相同。
7.基于上述控制电路的三相四开关直流无刷电机空间电压矢量的控制方法,在起动过程前,规定逆时针为正转,三相直流无刷电机的霍尔传感器会对电机的转子位置进行检测,根据转子位置,选择对应的电压矢量进行控制,实现电机导通状态。
8.建立α-β坐标系,定义三相直流无刷电机的a相电压矢量在90
°
方向,b相电压矢量在-150
°
方向,c相电压矢量在-30
°
方向,则所有可能的导通状态的电压矢量为八个,分别定义为电压矢量u1、电压矢量u2、电压矢量u3、电压矢量u4、电压矢量u5、电压矢量u6、电压矢量u7、电压矢量u8,其中电压矢量u1对应的控制电路连接状态为绝缘栅双极型晶体管t4导通,电压矢量u2对应的控制电路连接状态为绝缘栅双极型晶体管t1、t4导通,电压矢量u3对
应的控制电路连接状态为绝缘栅双极型晶体管t1导通,电压矢量u4对应的控制电路连接状态为绝缘栅双极型晶体管t1、t3导通,电压矢量u5对应的控制电路连接状态为绝缘栅双极型晶体管t3导通,电压矢量u6对应的控制电路连接状态为绝缘栅双极型晶体管t2、t3导通,电压矢量u7对应的控制电路连接状态为绝缘栅双极型晶体管t2导通,电压矢量u8对应的控制电路连接状态为绝缘栅双极型晶体管t2、t4导通;当检测到转子的位置在300
°
~0
°
之间的位置时,选择电压矢量u1;当检测到转子的位置在0
°
~30
°
之间的位置时,选择电压矢量u2;当检测到转子的位置在30
°
~90
°
之间的位置时,选择电压矢量u3;当检测到转子的位置在90
°
~120
°
之间的位置时,选择电压矢量u4;当检测到转子的位置在120
°
~150
°
之间的位置时,选择电压矢量u5;当检测到转子的位置在150
°
~210
°
之间的位置时,选择电压矢量u6;当检测到转子的位置在210
°
~270
°
之间的位置时,选择电压矢量u7;当检测到转子的位置在270
°
~300
°
之间的位置时,选择电压矢量u8。
9.与现有技术相比,本发明专利具有以下有益效果:本发明只需要四开关的变频调速,对于逆变输出而言,以直流母线电路电容c1和电容c2的中点为参考点作为电机c相输出,相对于电机而言,实际上形成了一个对称的三相波形,产生一个旋转的磁场,这样可以驱动电机转动。该三相四开关直流无刷电机空间电压矢量控制策略所用的主开关器件比传统变频电路少三分之一,同时实现调压和变频调速。本发明与其他的四开关直流无刷电机控制方式相比,采用了合成出八矢量的空间电压矢量进行控制,多出了两个空间电压矢量可以很好的对电机的转矩脉动进行抑制。
附图说明
10.图1为本发明三相四开关直流无刷电机空间电压矢量控制电路拓扑图;图2为本发明所述三相四开关直流无刷电机八矢量空间电压矢量图。
具体实施方式
11.下面结合附图对本发明做进一步的详细说明,图1所示,本发明所述三相四开关直流无刷电机空间电压矢量的控制电路具体包括一个直流母线部分和一个逆变部分,其中逆变部分的逆变电路与电源和电机的a相、b相负载相连,电机的c相与电容c1、c2的中性点e相连。
12.首先在起动过程前,规定逆时针为正转,电机运行在正转状态。
13.如图2所示,建立α-β坐标系。
14.假定a相电压矢量在α-β坐标系90
°
方向,b相电压矢量在-150
°
方向,c相电压矢量在-30
°
方向。直流无刷电机当中的霍尔传感器会对电机的转子位置进行检测,根据转子信号的位置可以将所有导通状态分类成如图2所示的八个矢量状态。
15.电压矢量u1:此时图1中的绝缘栅双极型晶体管t4导通,电流从直流母线中性点e端流出,经过电动机的c相流入,b相流出,再通过晶体管t4进入电容c2负端,由于仅使用了c2此时电机端电压大小为母线电压的一半。
16.电压矢量u2:此时图1中的绝缘栅双极型晶体管t1、t4导通,电流从电容c1正极流出,经过晶体管t1流过电动机a相流入, b相流出,经过晶体管t4进入电容c2负端,此时电机端电压大小为整个母线电压。
17.电压矢量u3:此时图1中的绝缘栅双极型晶体管t1导通,电流从电容c1正极经过晶体管t1流入a相,从c相流出,最后进入中性点e点,此时的电机端电压大小为母线电压的一半。
18.电压矢量u4:此时图1中的绝缘栅双极型晶体管t1、t3导通,电流从电容c1正极经过t1、t3流过a相和b相,经过c相流出到中性点e点,此时的电机端电压大小为母线电压的一半。
19.电压矢量u5:此时图1中的绝缘栅双极型晶体管t3导通,电流从电容c1正极经过晶体管t3流入b相,c相流出,最后进入中性点e点,此时的电机端电压大小为母线电压的一半。
20.电压矢量u6:此时图1中的绝缘栅双极型晶体管t2、t3导通,电流从电容c1正极经过t3流入b相,从a相流出。经过晶体管t2进入电容c2负端,此时的电机端电压大小为整个母线电压。a相b相同时导通时,电机将会受到两倍的母线电压大小。
21.电压矢量u7:此时图1中的绝缘栅双极型晶体管t2导通,电流从直流母线中性点e端流出,经过电动机的c相流入,a相流出,最后经过晶体管t2进入电容c2负端,此时的电机端电压大小为母线电压的一半。
22.电压矢量u8:此时图1中的绝缘栅双极型晶体管t2、t4导通,电流从直流母线中性点e端流出,进入c相,最终通过a相和b相流入电容c2负端,此时电机端电压大小为母线电压的一半。
23.三相四开关直流无刷电机空间电压矢量具体控制方法如下:当检测到转子的位置在30
°
~90
°
之间的位置时,此时根据直流无刷电机的控制方法应选择ua电压矢量进行控制。由于采用了四开关的控制方式因此不存在a相单独导通的情况,根据直流无刷电机90
°
控制策略此时应选择电压矢量u3。
24.当检测到转子的位置在90
°
~120
°
之间的位置时,选择电压矢量u4进行控制。
25.当检测到转子的位置在120
°
~150
°
之间的位置时,为了减少电机的转矩脉动,此时应选择电压矢量u5进行控制。
26.当检测到转子的位置在150
°
~210
°
之间的位置时,选择电压矢量u6进行控制,由于此时电压大小为整个母线电压大小ud,因此需要对控制信号的占空比进行修改,使得在这段时间内的平均作用电压大小为母线电压的一半。
27.当检测到转子的位置在210
°
~270
°
之间的位置时,选择电压矢量u7进行控制。
28.当检测到转子的位置在270
°
~300
°
之间的位置时,为了减少电机的转矩脉动,此时应选择电压矢量u8进行控制。
29.当检测到转子的位置在300
°
~0
°
之间的位置时,此时应选择电压矢量u1进行控制。
30.当检测到转子的位置在0
°
~30
°
之间的位置时,为了减少电机的转矩脉动,此时应选择电压矢量u2进行控制。
31.a相b相同时导通时,电机将会受到两倍的母线电压大小,因此需要对控制信号的占空比进行修改,使得在这段时间内的平均作用电压大小为母线电压的一半。
32.综上所述,本发明提出了一种八矢量合成的四开关直流无刷电机控制方法,电路,本发明电路所采用的器件相较于传统六开关逆变电路成本低很多,同时采用八矢量合成的控制方法对四开关直流无刷电机控制进行改进,与其他控制方法相比能更加明显的抑制转矩脉动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1