一种滚筒清洁光伏组件机器人的制作方法
1.本发明涉及光伏组件清洁技术领域,特别涉及一种滚筒清洁光伏组件机器人。
背景技术:
2.在光伏组件使用的过程中需要用到清洁机器人进行清洁,现有部分机器人,例如公开号为cn110166000a的装置中的部件,在使用的过程中,不能够根据光伏组件的大小进行安装调节,导致大多数需要使用者手持装置进行操作,进而造成了使用者劳动强度的增加,同时,现有部分机器人在使用的过程中,由于光伏组件上粘附有灰尘,导致单一的清扫部件不能够有效的清洁,进而降低了整个工作效率,造成需要重复清扫,耗费大量的时间,不仅如此,现有部分机器人在使用的过程中,由于光伏组件上会有积雪,直接清洁会造成更多的能源浪费,且不能够保证光伏组件的清洁质量,而通过加热融化又会导致机器人难以散热,为此,我们提出一种滚筒清洁光伏组件机器人。
技术实现要素:
3.本发明的目的在于至少解决现有技术中存在的技术问题之一,提供一种滚筒清洁光伏组件机器人,能够解决现有部分装置需要手持才能够进行操作以及不能够有效地清洁光伏组件且难以处理积雪与散热的问题。
4.为实现上述目的,本发明提供如下技术方案:一种滚筒清洁光伏组件机器人,包括:
5.机壳,底部固定安装有机座,机座的底部固定安装有夹座,机壳的内部设置有清扫机构和融化机构,机壳的一侧设置有冲洗机构,机壳的前后侧设置有支撑机构,机壳的顶部固定安装有主机板,主机板的顶部固定安装有控制板和太阳能板,机壳的两侧外表面各固定安装有一组把手;
6.夹持机构,设置于夹座的底部,夹座的底部开设有两组滑槽,两组滑槽内各滑动安装有一组滑块,两组滑块的一侧外表面各固定安装有一组连接杆。
7.优选的,所述夹持机构包括滑块、连接杆、夹持弹簧、拉环、夹板、扣板和夹紧螺丝,两组滑块与两组滑槽的内壁之间各固定安装有一组夹持弹簧,两组夹持弹簧各套设在两组连接杆上,两组连接杆各贯穿夹座的一侧延伸至夹座的一侧外并固定安装有一组拉环,夹座的底部各设置有一组夹板,两组夹板各通过滑槽与两组滑块固定连接,两组夹板的底部各设置有一组扣板,两组扣板的底部各转动安装有一组夹紧螺丝,两组夹紧螺丝各螺纹安装于两组夹板的底部。
8.优选的,所述清扫机构包括吊杆、固定板、滑杆、气缸、夹筒板、电机和清扫滚筒,机壳的前后侧内壁之间固定安装有吊板,吊板的底部固定安装有液压杆,液压杆的自由端固定安装有吊杆,机座的两侧内壁上各固定安装有一组固定板,两组固定板上各开设有一组限位槽,两组限位槽内各滑动安装有一组连接板,吊杆与两组连接板固定连接,两组连接板之间固定安装有滑杆,一组连接板的一侧外表面固定安装有气缸,滑杆上活动套设有夹筒
板,气缸的自由端与夹筒板固定连接,夹筒板的前侧外表面固定安装有电机,夹筒板的前后侧内壁之间转动安装有清扫滚筒,电机的输出轴通过联轴器与清扫滚筒固定连接。
9.优选的,所述冲洗机构包括水箱、注水盖、水泵、伸缩软管和喷淋枪,机壳的一侧外表面固定安装有水箱,水箱的顶部固定安装有注水盖,注水盖与水箱的内部相通,水箱的内侧底部固定安装有水泵,夹筒板的一侧外表面固定安装有喷淋枪,喷淋枪的顶部固定安装有伸缩软管,伸缩软管的一端与喷淋枪的内部相通,伸缩软管的另一端通过管道与水泵的输出端固定连接。
10.优选的,所述融化机构包括鼓风机、风管、导流板、电热丝和滤网,机壳的另一侧外表面固定安装有鼓风机,机壳的内壁上固定安装有风管,风管与鼓风机的输出端固定连接,机壳的内壁固定安装有两组导流板,两组导流板与机壳的内壁之间各固定安装有一组电热丝,吊板与机壳的内壁之间固定安装有两组滤网。
11.优选的,所述支撑机构包括挡板、复位弹簧、支撑板和抵杆,机壳的前后侧各开设有两组收纳槽,机壳的前后侧各设置有一组挡板,两组挡板滑动安装于收纳槽内,每组收纳槽内各固定安装有一组复位弹簧,每组复位弹簧的一端与挡板固定连接,两组挡板的底部各固定安装有一组支撑板,机壳的前后侧外表面各转动安装有两组抵杆,每组抵杆的底部与挡板的顶部相贴合。
12.优选的,所述水箱的内侧底部固定安装有水位传感器,主机板的顶部固定安装有报警器,水位传感器与报警器电连接,达到了在水箱内水即将用完时能够报警提醒使用者及时添加水的效果。
13.优选的,所述机壳的前后侧各开设有散热孔,两组挡板上各开设有一组与散热孔匹配的方形槽,达到了在机器人工作时挡板能够挡住散热孔避免影响融化效果,以及工作完成后能够及时进行散热的效果。
14.与现有技术相比,本发明的有益效果是:
15.(1)、该滚筒清洁光伏组件机器人,通过夹座和夹持机构的配合使用,能够使得机器人根据不同大小的光伏组件进行安装调节,解放了使用者的双手,解决了现有部分机器人在使用的过程中,不能够根据光伏组件的大小进行安装调节,导致大多数需要使用者手持进行操作,进而造成了使用者劳动强度的增加的问题,减轻了使用者的劳动强度,提高了机器人的实用性。
16.(2)、该滚筒清洁光伏组件机器人,通过清扫机构和冲洗机构的配合使用,能够使得机器人边冲洗边清扫光伏组件,能够有效的去除光伏组件上的灰尘等杂质,解决了现有部分机器人在使用的过程中,由于光伏组件上粘附有灰尘,导致单一的清扫部件不能够有效的清洁,进而降低了整个工作效率,造成需要重复清扫,耗费大量的时间的问题,提高了机器人的清洁效率,有利于机器人的推广和使用。
17.(3)、该滚筒清洁光伏组件机器人,通过融化机构和支撑机构的配合使用,能够在工作时通过加热融化积雪,且在完成工作后及时的进行散热,解决了现有部分机器人在使用的过程中,由于光伏组件上会有积雪,直接清洁会造成更多的能源浪费,且不能够保证光伏组件的清洁质量,而通过加热融化又会导致机器人难以散热的问题,延长了机器人的使用寿命,保证了机器人的使用效果。
附图说明
18.下面结合附图和实施例对本发明进一步地说明:
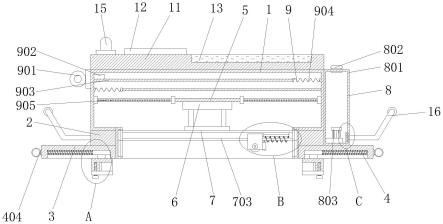
19.图1为本发明的结构示意图;
20.图2为本发明的正视图;
21.图3为本发明的左视图;
22.图4为本发明的a部位放大图;
23.图5为本发明的b部位放大图;
24.图6为本发明的c部位放大图。
25.附图标记:1、机壳;2、机座;3、夹座;4、夹持机构;401、滑块;402、连接杆;403、夹持弹簧;404、拉环;405、夹板;406、扣板;407、夹紧螺丝;5、吊板;6、液压杆;7、清扫机构;701、吊杆;702、固定板;703、滑杆;704、气缸;705、夹筒板;706、电机;707、清扫滚筒;8、冲洗机构;801、水箱;802、注水盖;803、水泵;804、伸缩软管;805、喷淋枪;9、融化机构;901、鼓风机;902、风管;903、导流板;904、电热丝;905、滤网;10、支撑机构;1001、挡板;1002、复位弹簧;1003、支撑板;1004、抵杆;11、主机板;12、控制板;13、太阳能板;14、水位传感器;15、报警器;16、把手。
具体实施方式
26.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
27.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.在本发明的描述中,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
29.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
30.请参阅图1-6,本发明提供一种技术方案:一种滚筒清洁光伏组件机器人,包括机壳1和夹持机构4,机壳1的底部固定安装有机座2,机座2的底部固定安装有夹座3,机壳1的内部设置有清扫机构7和融化机构9,机壳1的一侧设置有冲洗机构8,机壳1的前后侧设置有支撑机构10,机壳1的顶部固定安装有主机板11,主机板11的顶部固定安装有控制板12和太阳能板13,机壳1的两侧外表面各固定安装有一组把手16;
31.夹持机构4设置于夹座3的底部,夹座3的底部开设有两组滑槽,两组滑槽内各滑动安装有一组滑块401,两组滑块401的一侧外表面各固定安装有一组连接杆402。
32.夹持机构4包括滑块401、连接杆402、夹持弹簧403、拉环404、夹板405、扣板406和
夹紧螺丝407,两组滑块401与两组滑槽的内壁之间各固定安装有一组夹持弹簧403,两组夹持弹簧403各套设在两组连接杆402上,两组连接杆402各贯穿夹座3的一侧延伸至夹座3的一侧外并固定安装有一组拉环404,夹座3的底部各设置有一组夹板405,两组夹板405各通过滑槽与两组滑块401固定连接,两组夹板405的底部各设置有一组扣板406,两组扣板406的底部各转动安装有一组夹紧螺丝407,两组夹紧螺丝407各螺纹安装于两组夹板405的底部,在夹座3和夹持机构4的配合作用下,能够使得机器人根据不同大小的光伏组件进行安装调节,解放了使用者的双手,解决了现有部分机器人在使用的过程中,不能够根据光伏组件的大小进行安装调节,导致大多数需要使用者手持进行操作的问题,避免了造成了使用者劳动强度的增加,减轻了使用者的劳动强度,提高了机器人的实用性。
33.清扫机构7包括吊杆701、固定板702、滑杆703、气缸704、夹筒板705、电机706和清扫滚筒707,机壳1的前后侧内壁之间固定安装有吊板5,吊板5的底部固定安装有液压杆6,液压杆6的自由端固定安装有吊杆701,机座2的两侧内壁上各固定安装有一组固定板702,两组固定板702上各开设有一组限位槽,两组限位槽内各滑动安装有一组连接板,吊杆701与两组连接板固定连接,两组连接板之间固定安装有滑杆703,一组连接板的一侧外表面固定安装有气缸704,滑杆703上活动套设有夹筒板705,气缸704的自由端与夹筒板705固定连接,夹筒板705的前侧外表面固定安装有电机706,夹筒板705的前后侧内壁之间转动安装有清扫滚筒707,电机706的输出轴通过联轴器与清扫滚筒707固定连接。
34.冲洗机构8包括水箱801、注水盖802、水泵803、伸缩软管804和喷淋枪805,机壳1的一侧外表面固定安装有水箱801,水箱801的顶部固定安装有注水盖802,注水盖802与水箱801的内部相通,水箱801的内侧底部固定安装有水泵803,夹筒板705的一侧外表面固定安装有喷淋枪805,喷淋枪805的顶部固定安装有伸缩软管804,伸缩软管804的一端与喷淋枪805的内部相通,伸缩软管804的另一端通过管道与水泵803的输出端固定连接,水箱801的内侧底部固定安装有水位传感器14,主机板11的顶部固定安装有报警器15,水位传感器14与报警器15电连接,在清扫机构7和冲洗机构8的配合作用下,能够使得机器人边冲洗边清扫光伏组件,能够有效的去除光伏组件上的灰尘等杂质,解决了现有部分机器人在使用的过程中,由于光伏组件上粘附有灰尘,导致单一的清扫部件不能够有效的清洁,进而降低了整个工作效率的问题,避免了造成需要重复清扫而耗费大量的时间,提高了机器人的清洁效率,有利于机器人的推广和使用。
35.融化机构9包括鼓风机901、风管902、导流板903、电热丝904和滤网905,机壳1的另一侧外表面固定安装有鼓风机901,机壳1的内壁上固定安装有风管902,风管902与鼓风机901的输出端固定连接,机壳1的内壁固定安装有两组导流板903,两组导流板903与机壳1的内壁之间各固定安装有一组电热丝904,吊板5与机壳1的内壁之间固定安装有两组滤网905。
36.支撑机构10包括挡板1001、复位弹簧1002、支撑板1003和抵杆1004,机壳1的前后侧各开设有两组收纳槽,机壳1的前后侧各设置有一组挡板1001,两组挡板1001滑动安装于收纳槽内,每组收纳槽内各固定安装有一组复位弹簧1002,每组复位弹簧1002的一端与挡板1001固定连接,两组挡板1001的底部各固定安装有一组支撑板1003,机壳1的前后侧外表面各转动安装有两组抵杆1004,每组抵杆1004的底部与挡板1001的顶部相贴合,机壳1的前后侧各开设有散热孔,两组挡板1001上各开设有一组与散热孔匹配的方形槽,在融化机构9
和支撑机构10的配合作用下,能够在工作时通过加热融化积雪,且在完成工作后及时的进行散热,解决了现有部分机器人在使用的过程中,由于光伏组件上会有积雪,直接清洁会造成更多的能源浪费,且不能够保证光伏组件的清洁质量的问题,避免了通过加热融化又会导致机器人难以散热,延长了机器人的使用寿命,保证了机器人的使用效果。
37.工作原理:使用时,先转动抵杆1004,使其不再抵住挡板1001,挡板1001在复位弹簧1002的拉动作用下向上移动,并盖住机壳1上的散热孔,使得机壳1在工作时保持封闭,通过把手16提起机器人,将其放置在光伏组件上,根据光伏组件的大小厚度,转动夹紧螺丝407带动扣板406上下移动,并拉动拉环404带动滑块401压缩夹持弹簧403,使得夹板405对光伏组件进行夹持,此机器人安装在光伏组件上后,若光伏组件上有积雪,则先控制鼓风机901启动,鼓风机901通过风管902向机壳1的内部吹风,并对电热丝904进行通电,气流经过加热的电热丝904提高温度并通过滤网905,从机器人的底部吹在光伏组件上的积雪上,并对其进行融化,去除积雪后,控制液压杆6的自由端伸长,带动清扫机构7向下移动,控制电机706启动带动清扫滚筒707转动,清扫滚筒707对光伏组件进行清扫作用,同时控制气缸704的自由端伸长或缩短,使得清扫滚筒707左右来回移动,对光伏组件的整个区域进行清扫,与此同时,控制水泵803启动,将水箱801中的水通过伸缩软管804从喷淋枪805处喷出,使得清扫滚筒707在清扫的过程中,能够通过喷淋枪805对光伏组件上的灰尘进行冲洗,若水箱801中的水即将用完,水位传感器14会传递信号给报警器15,报警器15会发出警报提醒使用者水的余量,此机器人在工作时,通过太阳能板13进行太阳能充电,完成清洁工作后,将机器人取下,转动抵杆1004,使其抵住挡板1001向下移动,使得支撑板1003与地面接触进行放置。
38.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1