基于无位置传感器算法和平滑切换闭环策略的电机启动方法
1.本发明属于永磁无刷电机控制技术领域,具体涉及一种基于无位置传感器算法和平滑切换闭环策略的电机启动方法。
背景技术:
2.无刷直流电机是随着半导体电子技术飞速发展出现的产物,以现代电子技术、控制理论、电机技术相结合,具有控制性能好、调速范围宽、启动扭矩大、效率高等特点。早期直流电的电能是通过电刷和换向器进入电枢绕组,因此存在电刷磨损、电磁干扰、噪音大、寿命短等缺点,在许多重要场合,它是系统不稳定的重要来源。
3.近年来,由于电力电子以及矢量控制技术进步,无刷直流电机进入到应用阶段,由于其具有很高的可靠性,得到广泛的应用;最初无刷直流电机是用开环u/f恒定控制,后来增加了电流环,称为转差频率控制,改善了性能并已实用化。
4.但系统只是从稳态公式中推导出的平均值控制,启动时的稳定性差,进而用位置传感器来替代电刷,改善了启动时稳定性差的问题,但在某些特定场合(比如高湿度,油箱内以及带有磁场的环境)位置传感器容易失灵。随着永磁新材、微电子技术、自动控制技术以及电力电子技术革新,推出新一代正弦波无刷永磁同步电机(pmsm),通过采集相电压、相电流来合成电压矢量和电流矢量,计算出转子角度,控制旋转磁场始终超前转子磁场特定角度的旋转,推动转子转动。
5.由于无位置传感器算法在低速时普遍检测不准,因此通常需要将电机转子加速到一定速度后,其控制模型如图1(a)所示,然后使用无位置传感器算法检测速度和位置,并切入完整的速度闭环,其控制模型如图1(b)所示,从而实现电机的高性能矢量控制。
6.在系统切换的过程中,由于加速启动阶段的参考电流幅值i和位置角度θ均是给定的,但是进入速度闭环后,速度闭环阶段的参考电流的幅值i*是由速度控制模块决定,转子的位置角度θ*是无位置检测模块来决定,因此需要设计切换策略,图中if是加速启动阶段的反馈电流幅值,if*是速度闭环阶段的反馈电流幅值,v是加速启动阶段的参考速度幅值,vf是速度闭环阶段反馈速度幅值。在系统加速启动阶段完成后,给定的位置角度与转子实际位置角度(即无位置传感器检测的角度)是存在有相角差α,同时给定的电流幅值和速度环(比如pi控制器)产生的电流幅值也不一致,如图2所示,如果此时直接切换闭环,必然会导致转子的电流和转速的振荡,进而可能使得电机不能正常启动;所以为了电机的高性能运行,需要实现位置角度和电流幅值的平滑切换。
技术实现要素:
7.鉴于上述,本发明提供了一种基于无位置传感器算法和平滑切换闭环策略的电机启动方法,以实现电机稳定运行,避免切换过程中电机抖动。
8.一种基于无位置传感器算法和平滑切换闭环策略的电机启动方法,包括如下步骤:
9.(1)给定电机的电流幅值i和转子位置角θ;
10.(2)对电机实施i/f加速启动,使其达到给定转速;电机加速过程中,利用无位置传感器算法模块实时检测电机的转速v和转子位置角θ*,当检测到的转速v达到给定转速时,计算此时的相角差α=θ-θ*;
11.(3)通过调整给定转子位置角θ或电流幅值i使相角差趋近于0;
12.(4)将电机切入速度闭环控制模式。
13.进一步地,所述步骤(3)中通过调整给定转子位置角θ的具体实现如下为:
14.3.1通过以下公式计算第k次调整后的相角差变化率
[0015][0016]
其中:d1和d2为用于控制幂函数变化速率的给定系数,αk为第k次调整后通过步骤(2)计算得到的相角差,k为自然数;
[0017]
3.2根据相角差变化率通过以下公式计算下一次调整的相角差参考值
[0018][0019]
其中:δt为时间步长;
[0020]
3.3根据相角差参考值对给定转子位置角θ进行调整,重新执行步骤(2)并计算出第k+1次调整后的相角差α
k+1
,若α
k+1
小于精度阈值ε,则执行步骤(4),否则令k+1
→
k并返回执行步骤3.1。
[0021]
进一步地,所述步骤(3)中通过调整给定电流幅值i的具体实现如下为:
[0022]
3.1通过以下公式计算第k次调整后的电流变化率
[0023][0024]
其中:d2和d3为用于控制幂函数变化速率的给定系数,αk为第k次调整后通过步骤(2)计算得到的相角差,k为自然数;
[0025]
3.2根据电流变化率通过以下公式计算下一次调整的电流参考值i
k+1
;
[0026][0027]
3.3根据电流参考值i
k+1
对给定电流幅值i进行调整,重新执行步骤(2)并计算出第k+1次调整后的相角差α
k+1
,若α
k+1
小于精度阈值ε,则执行步骤(4),否则令k+1
→
k并返回执行步骤3.1。
[0028]
进一步地,所述步骤3.3中当调整次数达到设置最大迭代次数时,则不再进行调整,直接进入执行步骤(4)。
[0029]
进一步地,所述步骤(4)中将电机切入速度闭环控制模式,并将加速启动阶段给定的电流幅值i赋值作为速度闭环阶段的参考电流初始幅值。
[0030]
进一步地,当步骤(3)中通过调整给定电流幅值i使相角差趋近于0情况下,若相角差满足精度要求,所述步骤(4)先利用无位置传感器算法模块检测检测电机的当前转速vf,并将其赋值作为速度控制模块的参考转速,同时将加速启动阶段给定的电流幅值i赋值作
为速度闭环阶段的参考电流初始幅值,进而可以直接通过改变参考速度来调整电机工作状态,实现高性能矢量控制,使电机平滑稳定运行。
[0031]
进一步地,本发明电机启动方法基于d轴电流id=0的电机矢量控制方式。
[0032]
进一步地,所述相角差的变化率为c
α
且c
α
=δα/δt,电流的变化率为ci且ci=δi/δt,其中δα为相角差变化量,δi为给定电流变化量,δt为时间步长;为了保证切换的速度,需要增大相角差的变化率c
α
,但在相角差接近零的时候要求电机能够稳定运行,需要减少电流的变化率ci,不然可能因变化过快使得相角差变为负值,则电机会有失步的风险,因此本发明引入幂函数来动态控制相角差的变化即c
α
=d1α
d2
,d1和d2为用于控制幂函数变化速率的给定系数。
[0033]
本发明分析了电机启动过程中通过给定电流幅值和位置角度的变化来控制电机的启动,为了使给定的位置角度与转子实际位置角度相匹配,应在切换闭环的过程中逐步减少参考电流幅值的大小,直至两者基本无相角差,然后切换闭环,确保电机的平稳运行。本发明所提算法可以使得切换过程的前期斜率较大,切换过程后期斜率较小,显然满足切换速度闭环的性能要求。
附图说明
[0034]
图1(a)为加速启动阶段的电机控制模型示意图。
[0035]
图1(b)为速度闭环阶段的电机控制模型示意图。
[0036]
图2为参考电流幅值与相角差α在dq坐标系中的关系示意图。
[0037]
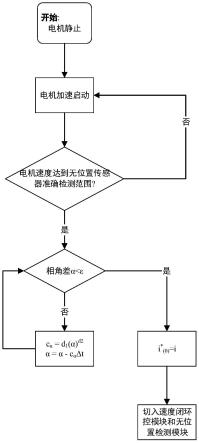
图3为本发明第一种实施方式的流程示意图。
[0038]
图4为初始转子位置角下的dq坐标系示意图。
[0039]
图5为坐标系中初始相角差α0的示意图。
[0040]
图6为调整k次后坐标系中相角差αk的示意图。
[0041]
图7为本发明第二种实施方式的流程示意图。
[0042]
图8为调整k次电流幅值后坐标系中电流与位置角的示意图。
[0043]
图9电流幅值迭代结束时坐标系中电流与位置角的示意图。
[0044]
图10为本发明第三种实施方式的流程示意图。
具体实施方式
[0045]
为了更为具体地描述本发明,下面结合附图及具体实施方式对本发明的技术方案进行详细说明。
[0046]
实施例1
[0047]
如图3所示,本实施方式的具体控制流程如下:
[0048]
(1)确定电机转子初始位置,从而建立转子的初始d
rotorqrotor
轴坐标系,如图4所示。
[0049]
(2)在初始位置角度基础上给定电流幅值i和角度θ实现i/f加速启动,转速v=δθ/δt,δθ为位置角度变化量
[0050]
(3)不断加速直到无位置传感器算法模块检测到的转速与给定的转速v=δθ/δt基本吻合,加速到基本吻合的最小速度值取决于所选择无位置传感器算法。
[0051]
(4)利用无位置传感器算法模块检测转子实际角度,得到初始相角差α0,如图5所示。
[0052]
(5)调整位置角度,调整k次的相角差αk如图6所示,αk<α0。
[0053]
在切换的过程中相角差α的变化率为c
α
,由于电机控制一般在数字控制中实现,所以用离散变量表示为:
[0054][0055]
式中:δα表示相角差的变化量,δt表示时间变化量。
[0056]
相角差α的不断变化直到其值趋近0,即两者基本无相角差,然后切换闭环。因此为了保证切换的速度,需要增大角度的变化率c
α
,但为了保证在角度差接近零的时候能够稳定运行,即接近临界稳定状态时能稳定运行,需要减少电流的变化率,不然可能因变化过快使得相角差变化为负值,则电机会有失步的风险,因此引入幂函数来动态控制角度的变化:
[0057][0058]
式中:d1和d2表示控制幂函数变化速率的系数。
[0059]
如果αk>ε,那么一直执行以下迭代过程,直至两者基本无相角差。
[0060][0061][0062]k←
k+1
[0063]
式中:表示相角差参考值,αk表示迭代k次后的相角差,ε表示精度阈值即误差范围,k表示迭代次数,可以设置最大迭代次数k
max
来作为结束循环另一个充分条件,即k>k
max
,结束循环。
[0064]
(6)当相角差αk<ε时,赋值i
*(0)
=i并切入速度闭环控制,i
*(0)
表示速度闭环阶段的参考电流的初始幅值。
[0065]
(7)改变参考速度幅值v,通过反馈速度幅值vf实现速度闭环,参见图1(b)。
[0066]
实施例2
[0067]
如图7所示,本实施方式的具体控制流程如下:
[0068]
(1)确定电机转子初始位置,从而建立转子的初始d
rotorqrotor
轴坐标系,如图4所示。
[0069]
(2)在初始位置角度基础上给定电流幅值i和角度θ实现i/f加速启动,转速v=δθ/δt,δθ为位置角度变化量
[0070]
(3)不断加速直到无位置传感器算法模块检测到的转速与给定的转速v=δθ/δt基本吻合,加速到基本吻合的最小速度值取决于所选择无位置传感器算法。
[0071]
(4)利用无位置传感器算法模块检测转子实际角度,得到初始相角差α0,如图5所示。其中的无位置传感器算法模块是可以根据电机控制器的输出电压与检测得到的电流,计算出电机反电动势,进一步计算出转子位置角θ。
[0072]
(5)调整电流幅值i,调整k次的电流幅值如图8所示。
[0073]
相角差α可以通过参考电流幅值的变化来控制,为了使给定的位置角度与转子实际位置角度相匹配,应在切换闭环的过程中逐步减少参考电流幅值的大小,直至两者基本无相角差,然后切换闭环;因此给定电流变化率ci可以表示为:
[0074][0075]
那么:
[0076][0077]
式中:d2,d3和d4表示控制幂函数变化速率的系数。
[0078]
如果αk>ε,那么一直执行以下迭代过程,直至两者基本无相角差,如图9所示。
[0079][0080]ik+1
=i
k-c
ik
δt
[0081]k←
k+1
[0082]
式中:c
ik
表示迭代k次后电流变化率,ik表示迭代k次后电流幅值,其中ε和d值(包括d2、d4)取决实际系统的特性与要求,显然本发明所提算法可以使得切换过程的前期斜率较大,切换过程后期斜率较小,显然满足切换速度闭环的性能要求。
[0083]
(6)当相角差αk<ε时,赋值i
*(0)
=i并切入速度闭环控制。
[0084]
实施例3
[0085]
如图10所示,本实施方式的具体控制流程如下:
[0086]
(1)确定电机转子初始位置,从而建立转子的初始d
rotorqrotor
轴坐标系,如图4所示。
[0087]
(2)在初始位置角度基础上给定电流幅值i和角度θ实现i/f加速启动,转速v=δθ/δt,δθ为位置角度变化量
[0088]
(3)不断加速直到无位置传感器算法模块检测到的转速与给定的转速v=δθ/δt基本吻合,加速到基本吻合的最小速度值取决于所选择无位置传感器算法。
[0089]
(4)利用无位置传感器算法模块检测转子实际角度,得到初始相角差α0,如图5所示。
[0090]
(5)调整给定电流幅值i,调整k次的电流幅值如图8所示。
[0091]
(6)当相角差αk<ε时,无位置传感器算法模块检测电机转速vf作为闭环阶段的速度反馈值,同时把当前的转速vf输入赋值给速度控制模块的参考速度v;当电流幅值不匹配时,可以通过设定速度环的初始值来解决,比如若速度控制模块采用常用的pid控制器,那么可以设置初始积分值。
[0092]
(7)赋值i
*(0)
=i并切入速度闭环控制,此时整个控制系统平滑切入速度闭环,进而可以直接通过改变参考速度来调整电机工作状态,实现高性能矢量控制,使电机平滑稳定运行。
[0093]
上述对实施例的描述是为便于本技术领域的普通技术人员能理解和应用本发明,熟悉本领域技术的人员显然可以容易地对上述实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,对于本发明做出的改进和修改都应该在本发明的保护范围
之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1