基于最优效率追踪和级联变换器的无线电能系统输出反馈控制方法
1.本发明属于电力电子及无线电能传输技术领域,具体涉及一种基于最优效率追踪和级联变换器的无线电能系统输出反馈控制方法。
背景技术:
2.无线电能传输技术是一种安全可靠的电能传输方式,具有供电灵活、维护便捷、适应恶劣的非接触环境以及易于实现无人供电和移动式供电的特征。在电力电子产品逐渐兴盛的如今,带有接口的电池充电方式存在接口磨损、裸露等缺点,易造成充电故障以及诱发火灾等危险,通过非接触式的无线电能传输方式可有效避免该问题。基于近场感性耦合的无线电能传输技术可以较好的满足非接触传输距离、较高的传输效率以及较大的传输功率以及安全性等需求,在电动汽车、消费电子、机械医疗等领域得到广泛的应用,尤其结合新能源发展趋势,具有良好的应用前景。然而,在对无线电能传输最优效率追踪控制时,有以下的几个需求:
3.(1)稳定的负载供电电压或者电流,无线电能传输系统作为一种新型供电电源,需要向负载提供稳定的电压或者电流。
4.(2)互感检测技术;无线电能传输系统无论是需要追寻最优控制阻抗或者界定系统是否处于系统安全充电范围,都需要实时对互感进行检测,避免系统充电过程中的失稳。
5.(3)系统最优追踪效率;无论是低功率的消费电子或者高功率的电动汽车,实现最优效率追踪,可以大大地节约能量损耗、减小散热、提高系统的功率密度以及提高系统的安全性。通过采用逆变器以及同步整流器进行最优效率追踪的控制方案,如公开号为cn110758132a和cn113595256a的中国专利,虽然这些方案减少了变换器的使用数量,但是由于导通角的无法大范围调节负载,容易造成传输效率降低以及导通角较小时给逆变器带来较大的电流应力。而通过在逆变器和整流器后端增设dc-dc装置使得系统的控制更加灵活,且不会干扰主功率电路的能量传输过程,尤其适合电动汽车等大功率应用系统。
6.(4)系统最优效率系统稳定性判据;目前在最优效率追踪控制的无线电能传输领域的稳定性主要通过检测负载的电压电流进行,但是由于其他公开控制主要采用扰动观察法以及分离的pid控制策略,如公开号为cn110758132a和cn113595256a的中国专利,但这类控制系统未考虑一些特殊运行情况下的系统稳定性判定问题。例如,当输入功率小于系统输出功率需求时,即使电压电流收敛,系统处于非最优效率点,长时间处于该状态运行,会造成系统传输功率下降,系统失去最优效率点稳定,无法自主追踪系统的最优效率点。因此在闭环控制系统中,通过发射侧进行系统稳定性判定也是无线电能传输技术所必需的。
7.由于实际无线电能传输过程中线圈的移动或者切载引起的功率波动,使得系统的平衡工作点发生变化,系统无法长时间稳定在同一个平衡点,因此需要设计一套具有高可靠性保障的最优效率追踪控制方法,并提出输入级系统稳定性判据,协助无线电能传输控制系统进行最佳效率追踪。而基于具有可靠性判据的中高功率的无线电能传输最优效率追
踪控制方法,目前仍然处于空白。
技术实现要素:
8.鉴于上述,本发明提供了一种基于最优效率追踪和级联变换器的无线电能系统输出反馈控制方法,该方法在能够保持负载输出恒定的充电电压/电流的条件下,基于初级侧系统稳定性判定方法,保持系统稳定的工作在最优效率点,克服了目前最优控制方式中的无法实时进行系统稳定形判定的缺点。
9.一种基于最优效率追踪和级联变换器的无线电能系统输出反馈控制方法,所述无线电能系统包括原边和副边两部分以及控制单元,原边部分由直流电源、前级dc-dc变换电路u1、原边逆变电路u3以及原边发射线圈l
p
依次连接组成,副边部分由副边接收线圈ls、副边整流电路u4、后级dc-dc变换电路u5以及负载依次连接组成,控制单元包括前级控制器u2、后级控制器u6以及互感测量模块;所述输出反馈控制方法包括如下步骤:
10.(1)对于原边的前级控制器u2,其利用互感测量模块通过无线通信方案或辅助线圈测量方案计算得到l
p
与ls的互感m、u5的输入电压vf、输入电流i
sk
以及输入阻抗r
eq
;
11.(2)根据互感m判断l
p
与ls的充电状态并计算系统的最优匹配阻抗r
eq_o
;
12.(3)根据输入阻抗r
eq
以及最优匹配阻抗r
eq_o
通过小信号阻抗稳定判据判断系统是否处于最优效率追踪的稳定状态;
13.(4)由前级控制器u2根据反馈量采用输出状态反馈控制策略对前级dc-dc变换电路u1进行控制;由后级控制器u6根据反馈量对后级dc-dc变换电路u5进行恒功率控制。
14.进一步地,所述步骤(1)若采用无线通信方案,可通过蓝牙或wifi的方式将u5的输入电压vf和输入电流i
sk
传输给原边的前级控制器u2,进而通过以下公式计算出l
p
与ls的互感m以及u5的输入阻抗r
eq
;
[0015][0016]
其中:v0为u1的输出电压,ω0为线圈谐振单元(包括l
p
、ls以及外部补偿电容)的谐振角频率。
[0017]
进一步地,所述步骤(1)若采用辅助线圈测量方案,前级控制器u2则通过以下公式计算出l
p
与ls的互感m、u5的输入电压vf、输入电流i
sk
以及输入阻抗r
eq
;
[0018][0019]
其中:v0为u1的输出电压,i
pk
为u1的输出电流,ω0为线圈谐振单元的谐振角频率,k0为固定参数(其大小取决于互感测量模块中电压采样电路的放大倍数以及l
p
与ls的互感参考值),vd为辅助线圈ld的感应电压,所述辅助线圈ld额外设置在原边且与l
p
和ls相互耦合。
[0020]
进一步地,所述步骤(2)中根据传输线圈在0~100mm的偏移量通过sae-j2954协议规定的充电范围设计确定传输线圈的互感范围[m
min
,m
max
],若计算得到的互感m在该互感范围内,则判定l
p
与ls处于充电状态并执行步骤(3);若计算得到的互感m不在该互感范围内,则判定l
p
与ls未处于充电状态,并调整l
p
与ls的偏移量后返回执行步骤(1)。
[0021]
进一步地,所述步骤(2)中通过以下公式计算系统的最优匹配阻抗r
eq_o
;
[0022][0023]
其中:rs为ls的等效交流电阻,r
p
为l
p
的等效交流电阻。
[0024]
进一步地,所述步骤(3)中若r
eq
≤r
eq_o
,则判定系统处于最优效率追踪的稳定状态下。
[0025]
进一步地,所述步骤(3)中若系统处于最优效率追踪的稳定状态下则执行步骤(4),否则调整l
p
与ls的偏移量或调整u1的输入电压后返回执行步骤(1)。
[0026]
进一步地,所述反馈量包括u5的输入电压vf和输入电流i
sk
以及负载电压和负载电流。
[0027]
进一步地,本发明无线电能系统输出反馈控制方法可适用于磁感应式无线电能传输系统或磁谐振式无线电能传输系统。
[0028]
进一步地,所述前级dc-dc变换电路u1和后级dc-dc变换电路u5可采用buck、boost或buck-boost等拓扑实现,所述原边逆变电路u3可采用全桥逆变、半桥逆变或class-e逆变等拓扑实现,所述副边整流电路u4可采用全桥整流、半桥整流、class-e整流等拓扑实现。
[0029]
本发明基于输出状态反馈控制无线电能传输的最优效率追踪控制方法在具体操作时,通过接收侧cpl控制器实现负载电压/电流的控制,满足负载的充电需求;通过互感检测、实际输出阻抗以及最优输出阻抗计算,判定系统的输出稳定性,极大地提升了系统的可靠性;通过输出状态反馈控制,使得系统工作在最优的控制效率。因此,本发明具有结构简单、控制方便、性能稳定、损耗较小、制造成本低,适用性广,可用于各种无线电能传输系统,具有良好的商业推广价值。
附图说明
[0030]
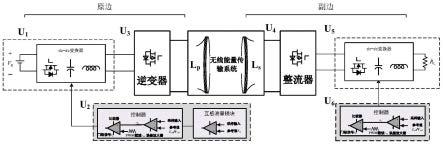
图1为基于最优效率追踪和级联变换器的无线电能系统结构框图。
[0031]
图2为本发明实施例中基于buck-ss-cpl结构的无线电能传输系统框图。
[0032]
图3为本发明实施例中的cpl/boost系统结构框图。
[0033]
图4(a)为本发明中ss谐振线圈系统的电路原理图。
[0034]
图4(b)为本发明中ss谐振线圈系统二端口网络等效结构框图。
[0035]
图4(c)为简化的三阶网络buck-ss-cpl大信号系统框图。
[0036]
图5为本发明无线电能系统输出反馈控制方法的流程示意图。
[0037]
图6为本发明buck-ss-cpl仿真系统小信号稳定性判据输出结果示意图。
[0038]
图7为本发明buck-ss-cpl仿真系统输入电压与输出电压的波形示意图。
[0039]
图8为本发明buck-ss-cpl仿真系统dc-dc输出电压与cpl输入电压的波形示意图。
具体实施方式
[0040]
为了更为具体地描述本发明,下面结合附图及具体实施方式对本发明的技术方案进行详细说明。
[0041]
如图1所示,本发明针对的无线电能系统包括原边和副边两部分以及控制单元,原边部分由直流电源、前级dc-dc变换电路u1、逆变器u3以及原边发射线圈l
p
依次连接组成,副边部分由副边接收线圈ls、整流器u4、后级dc-dc变换电路u5以及负载依次连接组成,控制单元包括前级控制器u2、后级控制器u6以及互感测量模块。
[0042]
图2所示为上述系统具体实施的电路结构原理,系统实现包括:直流电源、buck直流变换器、全桥逆变器、ss结构谐振腔、间接传感测量电路、整流器、接收侧电压采集以及无线通信模块、boost直流变换器以及负载构成的cpl模块、负载电压采集装置,其中:
[0043]
由boost构成的cpl模块如图3所示,通过负载电压采集装置,通过比较电压v
lref
输出误差量,通过pid控制器输出占空比,并通过门极比较器输出给同步整流装置进行恒压控制,使得boost直流变换器以及负载构成的电路在负载不变的情况下保持恒定功率负载(cpl)输出特性。
[0044]
如图3所示,boost电路在整流器输出电容cf的一端串联电感lf以及串联mos管s
12
,并联mos管s
11
,电容的另一端并联mos管s
11
的另一端构成电感充放电回路;mos管s
12
的另一端串联电容c
l
以及负载r
l
,mos管s
11
的另一端并联电容c
l
以及负载r
l
的另一端构成负载充放电回路。
[0045]
直接采样系统的cpl前端电压电流检测以及无线通信模块,通过采集cpl前端输入电流i
sk
以及电容电压vf,通过无线通信模块传递到输入侧前级,通过采集输入电流i
pk
以及电容电压vo,计算得到系统的最优阻抗负载r
eq_o
以及cpl前端输入阻抗r
eq
,通过式(1)判断最优效率追踪系统的稳定性。
[0046]
间接采样系统通过前级传感器可以测算ss线圈互感以及负载电流,通过采集输入电流i
pk
以及电容电压vo,计算得到系统的最优匹配负载r
eq_o
以及cpl前端输入阻抗r
eq
,通过式(1)判断最优效率追踪系统的稳定性。
[0047]req
≤r
eq_o
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0048]
前级buck电路通过在输入电源vg的一端串联mos管s
01
以及在另一端并联mos管s
02
,s
02
的另一端并联mos管s
01
构成前级dc-dc同步直流变换电路,s
02
的另一端并联电感l0以及寄生电阻r0,电感的另一端并联电容c0,s
02
的另一端并联电容c0的另一端构成dc-dc变换器输出充放电回路。
[0049]
输出反馈控制回路通过将输出cpl前端的电压vf或者电流i
sk
作为反馈状态量输入给前级buck控制器,与输入电压的比值作为buck占空比控制量,对系统实现最优效率追踪。
[0050]
逆变器电路由四个mos管组成全桥逆变电路,通过电容c0并联全桥逆变电路,组成输入级直流转交流的能量发射电路。
[0051]
ss结构电路由逆变器串联电容c
p
以及发射线圈电感l
p
以及寄生电阻r
p
组成发射线圈谐振电路,通过接收线圈电感ls串联电容cs以及寄生电阻rs以及并联输出全桥整流器构成接收线圈谐振电路。
[0052]
整流器电路由四个肖特基二极管组成的全桥不控整流电路,通过并联电容cf,组成输出级交流转直流能量接收电路。
[0053]
本发明基于输出状态反馈控制无线电能传输的最优效率追踪控制方法在具体操作时,通过接收侧cpl控制器实现负载电压/电流的控制,满足负载的充电需求;通过互感检测、实际输出阻抗以及最优输出阻抗计算,判定系统的输出稳定性,极大地提升了系统的可靠性;通过输出状态反馈控制,使得系统工作在最优的控制效率,具体过程如下:
[0054]
步骤一:计算系统的最优匹配负载r
eq_o
。
[0055]
由图4(a)可见,ss线圈系统的电路由一个直流电压源v0、全桥逆变电路、谐振电路(包括原边发射线圈l
p
、接收线圈ls以及外部补偿电容c
p
、cs)以及接收侧全桥整流电路以及直流负载r
eq
构成。wpt系统的损耗用线圈的交流阻抗r
p
、rs表示,为简化模型,考虑中间级线圈系统保持谐振状态,即圈系统保持谐振状态,即运用戴维南等效原理,将该电路简化为图4(b)所示,其中后级等效负载r
ac
包括了交流等效电阻rs以及输出等效负载r
ac0
。根据kvl定理,可得:
[0056][0057]
因此,输入输出电流值表达式由公式(3)确定:
[0058][0059]
系统的整体效率可以由输出功率与输入功率的比值由公式(4)确定:
[0060][0061]
因此,通过解等式系统的最佳效率点有极大值r
ac0_opt
,则:
[0062][0063]
其中:rs为ls的等效交流电阻,r
p
为l
p
的等效交流电阻。
[0064]
为简化分析,选取对称发射接收电路满足rs/r
p
=1,因此r
eq_o
≈π2r
ac
/8≈π2r
ac0_o
/8≈π2ω0m/8。当系统满足最佳效率条件时,输入阻抗z
in
呈阻性,满足r0=π2(ω0m+r
p
)/8≈π2ω0m/8。由ss电路的对称性以及能量守恒定理可知,系统在最大效率点,由公式(6)确定:
[0065][0066]
综上所述,通过式(5)可确定系统的最佳输出阻值r
eq_o
。
[0067]
步骤二:互感测量与反馈参数计算。
[0068]
其中输出反馈控制模型中的输出反馈电压的获取途径有两种:
①
无线通信方案;
②
互感预估计算方案。反馈的参数除了直接参与系统控制之外,还可以用于互感预估以及cpl前级输入阻抗计算。
[0069]
①
无线通信方案:
[0070]
图2给出了无线通信的输出反馈路径,其中u5的输入电压vf和输入电流i
sk
可以通过蓝牙或者wifi等方式将数据传输到发射侧。因此结合u1的输出电压v0可以得到互感以及cpl前级输入阻抗的表达式:
[0071][0072]
②
互感预估计算方案:
[0073]
通过互感计算输出反馈参数的过程,如图2所示,本发明通过采集辅助线圈(传感器)结构的感应电压vd以及发射侧电压v0,计算线圈互感m:
[0074][0075]
其中:k0为一固定参数,其大小取决于互感测量模块中电压采样电路的放大倍数以及ld与ls互感参考值。因此,接收侧的电压vf和电流i
sk
可以通过互感预估以及采集输入侧电压v0和电流i
pk
获取,vd为原边辅助线圈ld的感应电压,则:
[0076][0077]
因此,cpl前级输入阻抗的预估值r
eq
为:
[0078][0079]
通过上述分析可知,通过互感预估方案可以替代无线通信方案获取接收侧电压电流数据,提高控制系统的可靠性和稳定性。
[0080]
步骤三:系统的状态反馈控制方法。
[0081]
根据图2简化出带有cpl输出的开环等效系统电路图,如图4(c)所示,利用状态空间平均法可以列写三阶系统的大信号模型,由式(11)确定:
[0082][0083]
其中:d为前级buck电路的占空比,令x1=i
l
,x2=v0,x3=vf,令系统输出为输出电压vf,因此式(12)表示为状态空间矩阵方程:
[0084][0085]
其中:c=[0,0,1],通过将微分项dx=0求取系统的稳态解。
[0086]
将式(6)作为控制量,并应用输出反馈公式u=-hy,因此具有最优效率追踪的输出反馈控制的闭环系统状态空间表达式由式(13)确定:
[0087][0088]
其中系统矩阵有开环系统的a矩阵变为矩阵(a-bhc),因此输出反馈既不改变系统的阶次,也不改变系统变量的个数,闭环系统记为∑h(a-bhc,b,c)。结合式(6)以及式(11)求解给定输出功率p0下的稳态解,当buck电路的电感l0的q值较高时,忽略内阻r0,通过阿克曼计算公式可以推出:
[0089][0090]
综上所述,buck-ss-cpl系统的状态反馈输出控制方法,即将cpl输入前级的电压vf采集给buck电路作为电压的控制量。
[0091]
步骤四:系统的状态反馈控制方法的稳定性判据。
[0092]
列写出sswpt系统在稳态解处的闭环小信号方程,由式(15)确定:
[0093][0094]
因此,闭环系统∑h(a-bhc,b,c)的小信号的状态空间方程由式(17)确定:
[0095][0096]
其中:vf为系统的稳态解。
[0097][0098]
根据式(17)、式(18)建立的系统小信号模型可知,闭环系统∑h(a-bhc,b,c)属于线性定常连续自治系统。在输出功率p0下,系统矩阵a
δ
为非奇异矩阵,系统具有唯一的平衡状态δx
ss
=0,因此矩阵a
δ
对应的特征系数si(i=1,2,3)可通过求解行列式|si-a
δ
|=0得到:
[0099]
a3s3+a2s2+a1s+a0=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0100]
其中:
[0101]
[0102]
运用三阶劳斯判据表,结合式(20),为使式(19)中的极点位于左半平面,需要满足的充要条件是:
[0103]
a0》0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0104]
a1a
2-a0》0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0105]
若式(21)成立,则ai》0(i=1,2,3),结合(20,21),化简得到:
[0106][0107][0108]
通过式(23)得到输出反馈系统稳定的条件,即cpl稳定点前的输入阻抗的需要小于系统最优阻抗,即:
[0109]req
≤r
eq_o
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24)
[0110]
若系统在稳定点满足式(23)和式(24),进一步结合式(22),可以化简得到:
[0111][0112]
其中:
[0113][0114]
由于r0<<r
eq_o
,结合式(25)和式(26)可以得出式(22)成立。
[0115]
综上,基于输出反馈最优效率控制系统的平衡点稳定的充要条件时满足式(24)。
[0116]
上述控制方法可以归纳如图5所示,通过采集前级控制器占空比d、互感测量模块电压vd、输入电压vg、buck变换器输出电压v0以及输出电流i
pk
,首先通过式(7)或式(7)计算线圈互感m,依据sae-j2954协议规定的充电范围设计线圈的充电互感范围[m
min
,m
max
],通过计算值与该范围进行比较,若不满足合适的充电互感条件,则判断系统不稳定,停止或者不开启充电;若互感检测结果满足充电互感限制,则进一步通过式(9)计算cpl前级反馈电压
vf以及输出电流i
sk
,此外通过式(7)或式(10)计算得到的反馈电压vf以及输出电流i
sk
进一步计算cpl输入阻抗,结合互感计算得到的最优匹配阻抗值,输入到式(24)中的系统稳定性判据,若不满足该条件,则判定系统不稳定,停止充电过程;反之,则判定系统处于稳定工作状态,且通过输出反馈控制达到最优效率追踪控制状态,重复上述过程。
[0117]
选取一组参数对所提方法进行验证,参数如表1所示。
[0118]
表1
[0119][0120]
图6中t1时刻,负载从54ω切换到34ω,r
eq
满足小于r
eq_o
的稳态判定条件;因此图7中cpl输出电压维持96v恒压输出。图8中buck输出电压v0与boost输入电压vf近似满足相等,即达到最大效率追踪条件。
[0121]
图6中t2~t3时刻,负载从34ω切换至14ω的过程中,检测到r
eq
大于r
eq_o
,即不满足状态反馈控制系统稳定性判据,系统失稳;因此图7中cpl输出电压不能再维持恒压输出。图8中buck输出电压与boost的输入电压不能满足最大效率追踪条件,系统失去稳定,与稳定性判据结果相吻合。
[0122]
上述对实施例的描述是为便于本技术领域的普通技术人员能理解和应用本发明,熟悉本领域技术的人员显然可以容易地对上述实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,对于本发明做出的改进和修改都应该在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1