一种基于压电复合纤维的便携式薄板主动抑振系统
1.本发明涉及空间太阳能帆板技术领域,特别涉及一种基于压电复合纤维的便携式薄板主动抑振系统。
背景技术:
2.卫星太阳能电池板在执行空间飞行任务时起到为飞行器提供动力的作用,帆板在完全展开状态下为典型的挠性结构,在外部干扰(如空间碎片、太阳风、热辐射、温度冲击)和内部干扰(卫星自身的姿态调整、变轨运动以及卫星自身内结构的活动等)的作用下极易产生微振动。由于太空环境为低阻尼的状态,振动难以得到快速衰减,长时间的持续振动不仅会造成敏感构件的破坏,而且还会影响到通信卫星主体的指向精度和姿态稳定对卫星姿态控制造成非常不利的影响。因此为了保证精度指标的有效性,对太阳翼帆板微振动快速抑制势在必行。因此,急需一种太阳能帆板主动抑振实验系统的研究和开发,对于分析测试太阳能帆板的各项参数具有重要意义,并且为后续搭载升空的主动抑振系统提供实验和理论基础。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种基于压电复合纤维的便携式薄板主动抑振系统,以便脱离室内控制局限,实现帆板的自主抑振控制。
4.为了实现上述目的,本发明采用以下技术方案:
5.本发明提供一种基于压电复合纤维的便携式薄板主动抑振系统,包括致动器、传感器、太阳能帆板、微控制器及太阳能帆板夹持固定组件,其中太阳能帆板固定在太阳能帆板夹持固定组件上,太阳能帆板上布设有多个致动器和多个传感器,传感器用于检测太阳能帆板的振动信息且输出;
6.微控制器用于接收传感器发送的太阳能帆板的振动信息,并且根据该振动信息发送控制指令;
7.致动器用于接收微控制器发送的控制指令并且根据该控制指令对太阳能帆板进行主动抑振。
8.所述致动器为mfc致动器;所述传感器为mfc传感器;mfc传感器和mfc致动器均为压电纤维膜片。
9.所述太阳能帆板竖直布设,且沿水平方向的一端与所述太阳能帆板夹持固定组件固定连接;
10.多个所述传感器设置于所述太阳能帆板靠近所述太阳能帆板夹持固定组件的一端,且多个所述传感器沿高度方向依次间隔布设;
11.多个所述致动器设置于所述传感器的外侧,且多个所述致动器沿水平方向依次间隔布设。
12.所述致动器和所述传感器均通过环氧树脂胶水粘贴于所述太阳能帆板上。
13.所述太阳能帆板夹持固定组件包括太阳能帆板夹持架、太阳能帆板支撑座、测试基板及测试基座,其中测试基板设置于测试基座的顶部,太阳能帆板支撑座设置于测试基板上,太阳能帆板夹持架设置于太阳能帆板支撑座上,太阳能帆板夹持架上安装所述太阳能帆板。
14.所述测试基座的底部四角螺纹连接有底座支撑,通过底座支撑调整所述测试基座的高度。
15.所述测试基座的材质为铝型材,所述测试基板设置于所述测试基座的铝型材结构自身的凹槽内,且通过螺钉连接。
16.所述太阳能帆板夹持架、太阳能帆板支撑座及测试基板的材质采用45#钢板。
17.本发明的优点与有益效果是:
18.1.本发明的太阳能帆板还原卫星等的帆板结构,为后续分析双板较接甚至三板铰接提供方便;
19.2.本发明根据实际空间太阳能帆板,建立动力学模型,构建的试验系统能良好的匹配实际应用中的太阳能帆板;
20.3.本发明摒弃了电脑端处理振动信息的方式采用微控制器处理振动信息,实现了实验系统的便携式使用;
21.4.本发明采用多个mfc传感器和多个mfc制动器,在涉及控制算法的时候提供了足够的灵活性。
22.5.本发明的各部件之间采用螺杆结构连接,拆卸安装方便;各部分结构简单,采用激光切割和简单的焊接就能完成实验系统的制造,降低了设备的加工难度;
附图说明
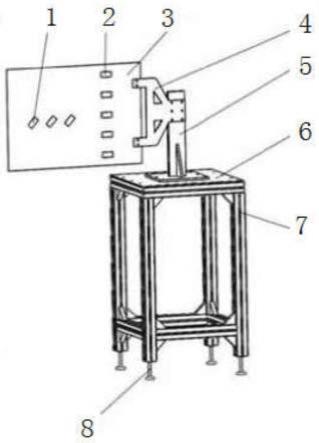
23.图1为本发明空间太阳能帆板主动抑振试验系统的轴测图;
24.图2为本发明中测试基座的结构示意图;
25.图3为本发明中测试基板的结构示意图;
26.图4为本发明中太阳能帆板支撑座的结构示意图;
27.图5为本发明中太阳能帆板夹持架的结构示意图;
28.图6为本发明中太阳能帆板与传感器和致动器的安装示意图;
29.图7为本发明的太阳能帆板主动抑振控制流程图;
30.图8为本发明接入控制前后的太阳能帆板振动曲线对比图;
31.图中:1为致动器,2为传感器,3为太阳能帆板,4为太阳能帆板夹持架,5为太阳能帆板支撑座,6为测试基板,7为测试基座,8为底座支撑,9为凹槽,10为测试基座底部内螺纹,11为测试基板外孔,12为测试基板内孔,13为太阳能帆板夹持架安装孔,14为测试基板安装孔,15为支撑座安装孔,16为太阳能帆板安装孔,17为连接孔,18为设备安置基板安装孔,a为未接入控制时的太阳能帆板的自由振动曲线,b为接入控制后太阳能帆板的振动曲线。
具体实施方式
32.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对
本发明进行详细描述。
33.如图1所示,本发明提供一种基于压电复合纤维的便携式薄板主动抑振系统,包括致动器1、传感器2、太阳能帆板3、微控制器及太阳能帆板夹持固定组件,其中太阳能帆板3固定在太阳能帆板夹持固定组件上,太阳能帆板3上布设有多个致动器1和多个传感器2,传感器2用于检测太阳能帆板3的振动信息且输出;微控制器用于接收传感器2发送的太阳能帆板3的振动信息,并且根据该振动信息发送控制指令;致动器1用于接收微控制器发送的控制指令并且根据该控制指令对太阳能帆板3进行主动抑振,以达到主动抑振的目的。
34.如图1所示,本发明的实施例中,太阳能帆板夹持固定组件包括太阳能帆板夹持架4、太阳能帆板支撑座5、测试基板6及测试基座7,其中测试基板6设置于测试基座7的顶部,太阳能帆板支撑座5设置于测试基板6上,太阳能帆板夹持架4设置于太阳能帆板支撑座5上,太阳能帆板夹持架4上安装太阳能帆板3。
35.进一步地,测试基座7的底部四角螺纹连接有底座支撑8,通过底座支撑8调整测试基座7的高度。
36.如图2所示,本发明的实施例中,测试基座7的材质为铝型材,测试基板6设置于测试基座7的铝型材结构自身的凹槽9内,且通过螺钉连接。测试基座7的底部四角设有测试基座底部内螺纹10,底座支撑8的上端设有用于与测试基座底部内螺纹10螺纹连接的外螺纹,通过旋转底座支撑8来调整测试基座7的高度及平行度。如图3所示,测试基板6上设有测试基板外孔11和测试基板内孔12,测试基板外孔11与测试基座7的凹槽9连接;测试基板内孔12与太阳能帆板支撑座5连接。如图4所示,太阳能帆板支撑座5的底部设有测试基板安装孔14,该测试基板安装孔14与测试基板6上的测试基板内孔12连接。太阳能帆板支撑座5的上端设有太阳能帆板夹持架安装孔13,太阳能帆板夹持架安装孔13与太阳能帆板夹持架4连接。如图5所示,太阳能帆板夹持架4的后端设有支撑座安装孔15,支撑座安装孔15与太阳能帆板支撑座5的太阳能帆板夹持架安装孔13连接;太阳能帆板夹持架4的前端设有太阳能帆板安装孔16,太阳能帆板安装孔16与太阳能帆板3连接。如图6所示,太阳能帆板3的一侧边缘设有连接孔17,通过该连接孔17与太阳能帆板夹持架4上的太阳能帆板安装孔16连接。致动器1和传感器2利用环氧树脂胶水粘贴于太阳能帆板3上。
37.本发明的实施例中,太阳能帆板3竖直布设,且沿水平方向的一端与太阳能帆板夹持固定组件固定连接;多个传感器2设置于太阳能帆板3靠近太阳能帆板夹持固定组件的一端,且多个传感器2沿高度方向依次间隔布设;多个致动器1设置于传感器2的外侧,且多个致动器1沿水平方向依次间隔布设。致动器1和传感器2的上述排布方式,通过对太阳能帆板3进行模态分析,得到太阳能帆板模型振动的最大应变位置,采用最大应变能理论指导致动器1和传感器2的粘贴位置。
38.优选地,致动器1为mfc致动器;传感器2为mfc传感器;mfc传感器和mfc致动器均为压电纤维膜片,根据正逆压电效应作为致动器和传感器作用,本质上是相同的。mfc传感器检测太阳能帆板3的振动变形量;mfc致动器上加载电压后的变形能抑制太阳能帆板3的振动。微控制器采用了树莓派公司的rp2040微控制器作为信号采集设备,利用thonny软件作为数据处理和系统控制软件,保证了系统的稳定性。mfc传感器粘贴于太阳能帆板3上用于检测太阳能帆板3的振动情况,并将振动信息发送给rp2040微控制器中心,rp2040微控制器用于接收mfc传感器发送的太阳能帆板3的振动信息,并且根据该振动信息发送控制指令。
mfc致动器粘贴于太阳能帆板3上,用于接收rp2040微控制器发送的控制指令并且根据该控制指令对太阳能帆板3进行主动抑振。
39.本发明的实施例中,测试基座7是整个系统的基本,为了方便安装和成本,采用50*50的方形铝型材材料,作为基座主要功能是承受太阳能帆板3振动产生的力,所以最基本的是稳定,所以测试基板6采用45#材料的钢板,测试基板6的结构简单,可以直接激光切割钢板一次成型,便于加工。太阳能帆板支撑座5和太阳能帆板夹持架4作为连接太阳能帆板3和测试基座7的中间结构需要较大的刚度,为了方便加工和刚度要求,同样采用45#钢板。本发明的结构部件之间通过螺丝连接,太阳能帆板支撑座5需要用到焊接工艺,为保证结构强度,使用氤弧焊工艺,整体设备安装误差要求不高,但是需要设备校平,校直。
40.本发明的工作原理是:
41.根据压电陶瓷的正逆压电效应,当压电陶瓷产生形变时,压电陶瓷发生电荷偏移产生电势差,即是电压,且根据形变量大小(在不破换内部结构的情况下),形变量越大电压差越大;当给压电陶瓷电极两端接入电压时,压电陶瓷产生形变,且电压越大,形变越大。
42.根据上述原理,对太阳能帆板3和压电纤维片进行联合动力学分析,创建动力学方程,将mfc压电纤维片粘贴在太阳能帆板3上。如此,太阳能帆板3的振动形变量会影响mfc压电纤维片的形变,mfc压电纤维片产生电势差经过放大、滤波等一系列信号处理输入给微控制器,微控制器根据特定的控制算法输出电压,加载在mfc致动器上。如此,mfc致动器的形变会影响太阳能帆板3的振动,经过这一完整的过程,以达到主动抑振的目的。
43.图7为太阳能帆板主动抑振控制流程图;如图7所示,其中mfc压电纤维片作传感器测试太阳能帆板的振动位移产生电压信号和初始设定平衡点(一般为0)作差,产生偏差信号e(t),偏差信号输入控制器由pid控制算法u(t)=kp(e(t)+l/ti/e(t)dt+td*de(t)/dt),调节pid的参数kp、ti、td,实现控制输出信号u(t)的功能,控制信号经由放大器加载至mfc致动器,mfc致动器由于逆压电效应产生形变,从而达到抑制太阳能帆板振动的效果。图8为本发明接入控制前后的太阳能帆板振动曲线对比图;如图8所示,其中,a曲线指示的是未接入控制时的太阳能帆板的自由振动曲线;b曲线指示的是接入控制后太阳能帆板的振动曲线,从图中可以看到,接入控制后太阳能帆板的振幅和振动时间都有明显的下降。
44.本发明测量方便,结构清晰,操作简单,尤其控制器体积小,实现了太阳能帆板抑振系统的便携式设计,使得帆板在各种环境下受到振动都能实现主动抑振的效果。
45.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1