一种基于永磁同步电机的增益调度智能闭环控制方法与流程
1.本发明属于永磁同步电机控制领域,特别涉及一种基于永磁同步电机的增益调度智能闭环控制方法。
背景技术:
2.永磁同步电机具有许多优良的特性,如重量轻、稳态扭矩密度高。由于这些优点,永磁同步电机被广泛应用于工业领域,特别是高性能的机电一体化应用,如机器人和机床。然而,永磁同步电机的自动控制技术面临一些问题,如不可避免的干扰。
3.线性控制系统,如pi控制器,在外部负载转矩和参数不确定的情况下很难正常工作,但非线性控制系统显示出良好的性能,如鲁棒控制,,超前预输入预测控制,反步控制,滑模控制等。超前预输入补偿可以有效改善现有工业系统的响应性能。
4.一些系统化的超前预输入控制器设计方法已经被提出,每一种方法都有独特的优势,如脉动转矩解耦方法和改善死区时间的补偿方法。基于永磁同步电机的模型,有人设计了一个超前预输入控制器。提出了一种带有负载观测器的自适应超前预输入控制器,观测器可以估计负载转矩和机械参数,这已被仿真和实验结果所证明,但它在负载转矩突然变化时可能没有良好的响应能力。还有人提出了一种超前预输入控制结构的闭环控制速度控制器,它完全依赖于估计的参数,如果得到不满意的估计结果,会使控制系统失去控制。接着有人提出了一个超前预输入负载转矩补偿器和一个pi速度控制器,并在负载转矩变化下显示出良好的性能。然而,在具有严重结构不确定性的系统中,它可能无法实现良好的性能。
技术实现要素:
5.发明目的:为了克服现有技术中存在的不足,本发明提供一种基于永磁同步电机的增益调度智能闭环控制方法,系统的速度稳定性能得到了改善,稳态误差更小,稳健性能更好,动态响应更快。
6.技术方案:为实现上述目的,本发明的技术方案如下:
7.一种基于永磁同步电机的增益调度智能闭环控制方法,包括以下步骤:
8.步骤一:建立永磁同步电机模型;
9.公式(1)和(2)为永磁同步电机的数学模型:
[0010][0011][0012]
永磁同步电机的扭矩公式可写为公式(3):
[0013][0014]
机械运动方程式:
[0015][0016]
使用表面安装的永磁同步电机,d-q轴的电感值ld等于lq,公式(3)可以写成如下:
[0017][0018]
q轴的电流指令i
q*
,可以写成如下:
[0019]iq*
=k
p
(t)e(t)+ki(t)∫e(t)dt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0020]
e(t)是速度偏离值(e(t)=ω
ref-ωm),k
p
(t)、ki(t)分别是增益系数、误差累积系数;
[0021]
通过公式(1),(2)计算出d-q轴的控制电压,首先将速度指令ω
ref
输入超前预输入系统,经过超前预输入系统的计算,可以得到ω
qf
,ω
qf
作为控制系统的速度超前预输入指令,指挥速度值ω
ref
和反馈速度值ωm之间的偏差值为输入增益调度闭环控制系统,速度控制器可以写成公式(7):
[0022][0023]kv
是速度控制器回路的增益系数,ki是速度控制器回路的误差累积系数;
[0024]
步骤二:永磁同步电机的超前预输入控制方法,包括子步骤a和子步骤b:
[0025]
子步骤a.电流环路超前预输入的设计:
[0026]
q轴电流计算公式如下,可从公式(2)中得到:
[0027][0028]
uq是q轴电压值,r
siq
是电阻电压,ldωeid是相互电压,是磁通联动电压;根据公式(8):
[0029][0030]rff
、ω
qf
分别为速度超前预输入回路中的电机、磁通联动和反馈速度的电阻;
[0031]
用i
qf
作为输入超前预输入电流指令,u
qf
是超前预输入的q轴电压,可以写成公式(10):
[0032][0033]
在公式(10)中,k
ciff
、k
cvff
、i
ff
、l
ff
分别为超前预输入控制系统的误差累积系数、增益系数、电流指令和速度超前预输入回路中的超前预输入电感;
[0034]
子步骤b.速度环路超前预输入的设计:
[0035]
用i
ff
作为超前预输入的电流指令,可以写成公式(11):
[0036][0037]kiff
、k
vff
、k
atff
、j
mff
分别是速度环路的误差累积系数、增益系数、超前预输入回路中的电机转矩系数和惯性矩,ω
ff
=ω
ref-ωm,由公式(12)计算:
[0038][0039]
根据公式(9)-(12),ω
qf
可以写成公式(13):
[0040][0041]
方程(13)可以写成方程(14):
[0042][0043]
根据方程(13),函数f1、f2可以写成方程(15):
[0044][0045]
方程(15)可以写成方程(16):
[0046][0047]
假设k
atr
、lr、rr、j
mr
分别是永磁同步电机中扭矩系数、电感、定子电阻、转子磁通联动、惯性矩的理想参数,函数满足公式(17):
[0048][0049]
是误差累计和增益的理想;同样的控制结构被用于反馈系统和超前预输入系统,ωm可以写成公式(18):
[0050][0051]
是反馈系统中理想的误差累积值和增益值;公式(19)通过调整就可以满足下式:
[0052][0053]
根据公式(17)-(19),速度指令ω
ref
和速度反馈ωm之间的传递函数显示在公式(20):
[0054][0055]
步骤三:增益调度智能闭环控制方法:
[0056]
增益调度值通过指数计算来调整,这使得速度偏差补偿变得快速;
[0057][0058]
在公式(21)中,k
vff(k+1)
、k
iff(k+1)
是下一个控制周期的增益和误差累积值;k
vff(max)
、k
vff(min)
是最大和最小的增益值;k
iff(max)
、k
iff(min)
是最大和最小的误差累计值;ω
ff(k)
是速度指令(ω
ref
)和反馈速度(ωm)之间的偏离值;f可以写成公式(22),它决定了k
vff
/k
iff
在最大和最小值之间的变化率,如下式:
[0059][0060]
当ω
ff(k)
的值较大时,k
vff
的值增大,以加快瞬态响应;
[0061]
当ω
ff(k)
的值较小时,k
vff
的值变小,被用来消除过冲和震荡;
[0062]
当ω
ff(k)
的值较大时,k
iff
的值变小,用于消除振荡和过冲;
[0063]
当ω
ff(k)
的值较小时,k
iff
的值变大,用于克服稳态误差;
[0064]
则k
vff
和k
iff
的值根据偏离速度值ω
ff(k)
在最大值和最小值之间变化,得到永磁同步电机的增益调度智能闭环控制方法的传递函数为:
[0065][0066]
有益效果:本发明包含以下优点:
[0067]
1、提出了超前预输入系统,这种控制结构可以保证速度指令输入到输出与干扰输入到输出的独立性,使系统具有更好的参考轨迹跟踪和干扰抑制能力。
[0068]
2、提出了增益调度闭环算法,可以在在外部负载转矩干扰和永磁同步电机参数不
确定的情况下,与没有该控制器的控制器相比,稳态误差更小,动态响应更好。
附图说明
[0069]
附图1为本发明中永磁同步电机控制系统示意图;
[0070]
附图2为本发明中永磁同步电机驱动系统方框图;
[0071]
附图3为本发明中超前预输入控制系统电流的方框图;
[0072]
附图4为本发明中增益调度控制的方框图;
[0073]
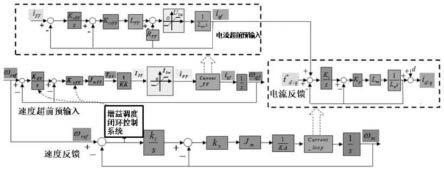
附图5为本发明中带有增益调度控制的超前预输入系统示意图。
具体实施方式
[0074]
下面结合附图对本发明作更进一步的说明。
[0075]
如附图1至附图5所示,一种基于永磁同步电机的增益调度智能闭环控制方法,其特征在于:所述方法的具体实现过程包括以下步骤:
[0076]
步骤一:建立永磁同步电机模型
[0077]
公式(1)和(2)显示了永磁同步电机的数学模型:
[0078][0079][0080]
永磁同步电机的扭矩公式可写为公式(3):
[0081][0082]
机械运动方程式:
[0083][0084]
在本文中,使用表面安装的永磁同步电机,d-q轴的电感值ld,等于lq。公式(3)可以写成如下:
[0085][0086]
q轴的电流指令i
q*
,可以写成如下:
[0087]iq*
=k
p
(t)e(t)+ki(t)∫e(t)dt
ꢀꢀꢀ
(6)
[0088]
e(t)是速度偏离值(e(t)=ω
ref-ωm),k
p
(t),ki(t)是增益系数,和误差累积系数。然后我们可以得到q轴的指令电流值,并通过公式(1),(2)计算出d-q轴的控制电压。
[0089]
如图(1)所示,首先将速度指令ω
ref
输入超前预输入系统。经过超前预输入系统的计算,我们可以得到ω
qf
。ω
qf
作为控制系统的速度超前预输入指令,i
qf
作为电流超前预输入指令,指挥速度值ω
ref
和反馈速度值ωm之间的偏差值为输入增益调度闭环控制系统。如
图(2)所示,速度控制器可以写成公式(7):
[0090][0091]kv
是速度控制器回路的增益系数,ki是速度控制器回路的误差累积系数;
[0092]
步骤二:永磁同步电机的超前预输入控制方法
[0093]
子步骤a.电流环路超前预输入的设计
[0094]
q轴电流计算公式如下,可从公式(2)中得到:
[0095][0096]
uq是q轴电压值,r
siq
是电阻电压,ldωeid是相互电压,是磁通联动电压。根据公式(8):
[0097][0098]rff
,ω
qf
分别为速度超前预输入回路中的电机、磁通联动和反馈速度的电阻。用i
qf
作为输入超前预输入电流指令。u
qf
是超前预输入的q轴电压,可以写成公式(10):
[0099][0100]
在公式(10)中,k
ciff
,k
cvff
,i
ff
,l
ff
,分别为超前预输入控制系统的误差累积系数、增益系数、电流指令和速度超前预输入回路中的超前预输入电感。;
[0101]
子步骤b.速度环路超前预输入的设计
[0102]
用i
ff
作为超前预输入的电流指令,可以写成公式(11):
[0103][0104]kiff
,k
vff
,k
atff
,j
mff
分别是速度环路的误差累积系数、增益系数、超前预输入回路中的电机转矩系数和惯性矩,ω
ff
=ω
ref-ωm,由公式(12)计算:
[0105][0106]
如图(3)所示,根据公式(9)-(12),ω
qf
可以写成公式(13):
[0107]
[0108]
方程(13)可以写成方程(14):
[0109][0110]
根据方程(13),函数f1、f2可以写成方程(15):
[0111][0112]
方程(15)可以写成方程(16):
[0113][0114]
假设k
atr
,lr,rr,j
mr
分别是永磁同步电机中扭矩系数、电感、定子电阻、转子磁通联动、惯性矩的理想参数,函数满足公式(17):
[0115][0116]
是误差累计和增益的理想值。同样的控制结构被用于反馈和超前预输入系统,ωm可以写成公式(18):
[0117][0118]
是反馈系统中理想的误差累积值和增益值。公式(19)通过调整就可以满足下式:
[0119][0120]
根据公式(17)-(19),速度指令ω
ref
和速度反馈ωm之间的传递函数显示在公式(20):
[0121][0122]
步骤三:增益调度智能闭环控制方法
[0123]
如图(4)所示,增益调度值可以通过指数计算来调整,这使得速度偏差补偿变得快速。
[0124][0125]
在公式(21)中,k
vff(k+1)
,k
iff(k+1)
是下一个控制周期的增益和误差累积值。k
vff(max)
,k
vff(min)
是最大和最小的增益值。k
iff(max)
,k
iff(min)
是最大和最小的误差累计值。ω
ff(k)
是速度指令(ω
ref
)和反馈速度(ωm)之间的偏离值。f可以写成公式(22),它决定了k
vff
/k
iff
在最大和最小值之间的变化率。,如下式:
[0126][0127]
当ω
ff(k)
的值较大时,k
vff
的值增大,以加快瞬态响应。当ω
ff(k)
的值较小时,k
vff
的值变小,被用来消除过冲和震荡,相反,当ω
ff(k)
的值较大时,k
iff
的值将变小,用于消除振荡和过冲,当ω
ff(k)
的值较小时,k
iff
的值变大,用于克服稳态误差,如上所述,k
vff
和k
iff
的值根据偏离速度值ω
ff(k)
在最大值和最小值之间变化;
[0128]
如图(5)所示,最终我们可以得到永磁同步电机的增益调度智能闭环控制方法的传递函数为:
[0129][0130]
本发明提出一种基于永磁同步电机的增益调度智能闭环控制方法,在不同的工作条件下,增益和误差累积都可以智能控制。超前预输入系统中使用的控制结构与反馈控制系统相同。这种控制结构可以保证速度指令输入到输出与干扰输入到输出的独立性,使系统具有更好的参考轨迹跟踪和干扰抑制能力。为了在参数不确定时获得最佳控制性能,在超前预输入系统中使用了一个增益调度闭环控制系统。在外部负载转矩干扰和永磁同步电机参数不确定的情况下,与没有该控制器的控制器相比,稳态误差更小,动态响应更好。
[0131]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1