一种提高电机转矩能力的过调制方法与流程
1.本发明属于电动汽车电机控制技术领域,具体涉及一种提高电机转矩能力的过调制方法。
背景技术:
2.在新能源汽车动力系统中,电机控制系统是非常重要的零部件之一,电机控制性能的优劣直接影响汽车驾驶体验。过调制技术能提高直流母线电压利用率,提高电机的外特性,进而使汽车有高的续航里程和强的动力输出能力。
3.现有过调制技术一:将过调制区域划分为过调制1区和过调制2区,在过调制1区中保持电压矢量相位不变,修改电压矢量幅值,在过调制2区对电压矢量的相位和幅值进行渐变的修改。这种方法计算复杂,不利于数字化实现,且输出电压难以达到六步工作模式,动态性能也不好。
4.现有过调制技术二:将矢量控制的输出给定电压分解为反电势电压和动态电压两个部分,在电机控制系统出现较大转速、转矩突变进入过调制状态时,在保证原电压矢量的反电动势不变的基础上,对电流调节器输出的动态电压进行修正,以优化dq轴电流的动态响应。该方法提高母线电压利用率,有好的动态响应能力,但无法达到六步工作模式,电压利用率没有达到最大。
技术实现要素:
5.本发明的目的就是为了解决上述背景技术存在的不足,提供一种提高电机转矩能力的过调制方法,在提高直流母线电压利用率基础上,使输出电压能达到六步工作模式,而且在进入过调制时还具有较好的动态响应能力。
6.本发明采用的技术方案是:一种提高电机转矩能力的过调制方法,包括以下步骤:
7.在电机过调制前,通过整车控制器的转矩指令和上个周期弱磁控制输出的补偿电流获得电机的dq轴电流参考值;
8.获取电机的dq轴电流反馈值;通过对电机的dq轴电流反馈值和dq轴电流参考值进行pi调节,得到电机的dq轴电压参考值;
9.通过电机的dq轴电压参考值计算得到三相电压和参考电压幅值;
10.根据电机的参考电压幅值与上个周期过调制后输出至逆变器的电压幅值计算得到电机每相需要的补偿电压;根据电机的三相电压和每相需要的补偿电压计算得到补偿后电机每一相的电压值并输出至逆变器;通过逆变器控制电机,实现电机过调制;
11.在电机过调制后,获取电机的三相相电压;根据电机的三相相电压得到电机的dq轴坐标系电压;
12.根据电机的dq轴坐标系电压计算得到本周期过调制后输出至逆变器的电压幅值。
13.上述技术方案中,通过整车控制器的转矩指令和上个周期弱磁控制输出的补偿电流获得电机的dq轴电流参考值的过程包括:电机控制器通过can通信接收整车控制器发送
的的转矩指令;电机控制器根据转矩指令查询电流map表,得到对应的dq轴电流参考值;将该dq轴电流参考值与弱磁控制输出的补偿电流进行叠加得到最终的dq轴电流参考值并输出。本发明基于实时的转矩指令通过查表和补偿电流计算得到dq轴电流参考值,实现实时的闭环控制,计算高效的同时满足电机的实际需求。
14.上述技术方案中,采用下式计算得到参考电压幅值vs:
[0015][0016]
其中,vd为d轴电压参考值,vq为q轴电压参考值。
[0017]
上述技术方案中,采用下式计算得到电机的三相电压:
[0018]vα
=vdcosθ-vqsinθ
[0019]vβ
=vdsinθ+vqcosθ
[0020]
va=v
α
[0021][0022][0023]
其中,vd为d轴电压参考值,vq为q轴电压参考值;v
α
、v
β
为定子αβ坐标系电压;va为电机a相电压,vb为电机b相电压,vc为电机c相电压,θ为转子磁链角度。上述计算方式能够满足电机当前的补偿需求。
[0024]
上述技术方案中,采用下式计算电机的dq轴坐标系电压v
do
、v
qo
:
[0025]vαo
=v
ao
[0026][0027]vdo
=v
αo
cosθ+v
βo
sinθ
[0028]vqo
=-v
αo sinθ+v
βo
cosθ
[0029]
其中,v
ao
、v
bo
、v
co
为过调制后的电机三相相电压,v
αo
、v
βo
为定子αβ坐标系电压,θ为转子磁链角度。上述计算方式能够满足电机当前的补偿需求。
[0030]
上述技术方案中,采用下式计算本周期过调制后输出至逆变器的电压幅值v
so
:
[0031][0032]
上述技术方案中,采用下式计算电机每相需要的补偿电压v
com
:
[0033]vcom
=k*(v
s-v
so’)
[0034]
其中,k是比例阈值,vs是参考电压幅值,v
′
so
是上个周期过调制后输出至逆变器的电压幅值。本发明采用上个周期的输出电压幅值计算本周期补偿电压,有效实现对相电压的补偿,能提高转矩响应能力。
[0035]
上述技术方案中,采用下式计算补偿后电机每一相的电压值v
′a、v
′b、v
′c:
[0036]v′a=va+sign(va)*v
com
[0037]v′b=vb+sign(vb)*v
com
[0038]v′c=vc+sign(vc)*v
com
[0039]
其中,sign是数学符号函数,v
com
是电机每相需要的补偿电压,va为电机a相电压,vb为电机b相电压,vc为电机c相电压。本发明直接对相电压进行补偿,使电机快速进入六步工
作模式。
[0040]
上述技术方案中,获取电机的dq轴电流反馈值的过程包括:采样电机定子abc三相电流,经clark、park变换得到dq坐标系下电流作为dq轴电流反馈值。
[0041]
上述技术方案中,基于过调制后输出电压幅值进行弱磁计算,采用负id电流补偿方法计算得到补偿电流,形成过调制的闭环。
[0042]
本发明的有益效果是:与传统过调制技术相比的优势在于:电机控制器能够达到六步工作模式,电压利用率高,且在过调制区转矩有好的动态响应能力。本发明直接在相电压上补偿,能提高转矩响应能力,且与传统方法不同的在于,不用区分过调制一区和二区,理论上只要进入过调制,电压都可直接补偿,计算过程简单,有利于数字化实现。本发明基于实时的转矩指令通过查表和补偿电流计算得到dq轴电流参考值,实现实时的闭环控制,计算高效的同时满足电机的实际需求。本发明采用上个周期的输出电压幅值计算本周期补偿电压,有效实现对相电压的补偿,能提高转矩响应能力。本发明直接对相电压进行补偿,使电机快速进入六步工作模式。
附图说明
[0043]
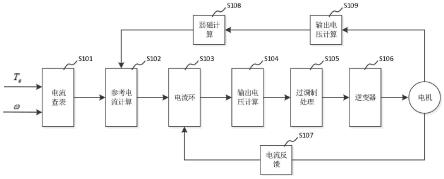
图1是本发明的电机控制方式主要流程示意图;
[0044]
图2是本发明的过调制补偿电压计算示意图;
[0045]
图3是本发明的六步工作模式电压仿真轨迹图;
[0046]
图4a是未开启本发明的过调制算法的转速波形;
[0047]
图4b是开启本发明的过调制算法的转速波形;
[0048]
图5a是未开启本发明的过调制算法的负载阶跃速度波形;
[0049]
图5b是开启本发明的过调制算法的负载阶跃速度波形。
具体实施方式
[0050]
下面结合附图和具体实施例对本发明作进一步的详细说明,便于清楚地了解本发明,但它们不对本发明构成限定。
[0051]
本发明提供了一种提高电机转矩能力的过调制方法,包括以下步骤:
[0052]
a.过调制前,计算参考电压幅值:
[0053]
通过整车控制器的转矩指令和上个周期弱磁控制输出的补偿电流获得电机的dq轴电流参考值;
[0054]
获取电机的dq轴电流反馈值;通过对电机的dq轴电流反馈值和dq轴电流参考值进行pi调节,得到电机的dq轴电压参考值;
[0055]
通过电机的dq轴电压参考值计算得到三相电压和参考电压幅值。
[0056]
b.过调制:
[0057]
根据电机的参考电压幅值与上个周期过调制后输出至逆变器的电压幅值计算得到电机每相需要的补偿电压;根据电机的三相电压和每相需要的补偿电压计算得到补偿后电机每一相的电压值并输出至逆变器;通过逆变器控制电机,实现电机过调制。
[0058]
c.过调制后,计算输出的电压幅值:
[0059]
在电机过调制后,获取电机的三相相电压;根据电机的三相相电压得到电机的dq
轴坐标系电压;
[0060]
根据电机的dq轴坐标系电压计算得到本次过调制后输出电压幅值。
[0061]
如图1所示,过调制前参考电压幅值计算步骤为:
[0062]
步骤s101,采用foc矢量控制方式,电机控制器mcu通过can通信接收整车控制器vcu的转矩指令te。
[0063]
电机控制器软件内部接收到指令te后,通过电流map表,得到dq电流参考值id、iq。其中电流map表在电机标定时已经确定,固定在软件代码中。
[0064]
步骤s102,当电机运行在高转速区域时,会进入弱磁控制,弱磁控制输出补偿电流。将上个周期的补偿电流与查表得到的dq电流参考值id、iq叠加,作为最终的dq轴电流参考值。
[0065]
步骤s103,本具体实施例有两个电流环,dq轴电流参考值与电机的dq轴电流反馈值通过pi调节器后,得到参考电压vd、vq。由获取的dq轴参考电压得到参考电压的幅值vs,所用计算公式为,
[0066][0067]
步骤s104在上述计算出vd、vq的基础上,经park、clark逆变换得到abc三相电压。所用电压变换公式如下,
[0068]vα
=vdcosθ-vqsinθ
[0069]vβ
=vdsinθ+vqcosθ
[0070]
va=v
α
[0071][0072][0073]
其中所述v
α
、v
β
为定子αβ坐标系电压,va为电机a相电压,vb为电机b相电压,vc为电机c相电压。
[0074]
当通过计算发现上一个周期的逆变器的输出电压小于给定的参考电压时,即判定本周期需要进行过调制;过调制的过程包括以下步骤:
[0075]
步骤s105,图2所示,采用以下步骤基于abc三相电压进行过调制处理,得到过调制后的电压输出至控制逆变器。
[0076]
步骤s105具体包括以下步骤:
[0077]
步骤s201,参考电压幅值vs与过调制后输出电压的幅值v
so
进行相减,得到差值。具体来讲,经过过调制处理后,输出电压不一定会等于参考电压,这是本发明技术方面的理论支撑之一。
[0078]
步骤s202,根据实际试验结果确定是比例阈值k。
[0079]
步骤s203,所得电压差值再与比例系数k相乘,得到每相需要的补偿电压v
com
,所用计算公式如下,
[0080]vcom
=k*(v
s-v
so’)
[0081]
其中,k是比例阈值,vs是参考电压幅值,v
′
so
是上个周期过调制后输出至逆变器的电压幅值。
[0082]
步骤s204-206,根据相电压极性,计算补偿后每一相电压的值,所用计算公式如下,
[0083]v′a=va+sign(va)*v
com
[0084]v′b=vb+sign(vb)*v
com
[0085]v′c=vc+sign(vc)*v
com
[0086]
其中,sign是数学符号函数。
[0087]
经过电压补偿后得到新的abc三相电压v
′a、v
′b、v
′c,输出至图1所示的逆变器,应用于步骤s106。由abc三相电压产生pwm信号,用于控制逆变器功率管开通和关断,进而控制电机运行。步骤s106,通过逆变器控制电机。
[0088]
步骤s107,计算电机反馈的dq电流,计算方法是先采样电机定子abc三相电流,经clark、park变换得到dq坐标系下电流,得到电机的dq轴电流反馈值用于步骤s103计算。
[0089]
步骤s108,获取过调制后电机三相相电压v
ao
、v
bo
、v
co
,三相相电压v
ao
、v
bo
、v
co
经clark、park变换,得到dq轴坐标系电压v
do
、v
qo
,所用电压变换公式如下,
[0090]vαo
=v
ao
[0091][0092]vdo
=v
αo
cosθ+v
βo
sinθ
[0093]vqo
=-v
αo
sinθ+v
βo
cosθ,其中所述v
αo
、v
βo
为定子αβ坐标系电压,所述θ为转子磁链角度。
[0094]
计算输出电压的电压幅值,所用计算公式如下,
[0095][0096]
其中所述v
so
为过调制后输出至逆变器的电压的幅值。
[0097]
步骤s109,基于过调制后输出至逆变器的电压的幅值进行弱磁计算,采用负id电流补偿方法计算得到补偿电流,用于下个周期的步骤s102计算。
[0098]
本发明方法的理论分析为:电机运行可分为两种情况,一种是未进入过调制的恒转矩区,另一种是进入了过调制。
[0099]
未进入过调制:当时,采用常规的svpwm调制方法计算逆变器的输出电压,此时逆变器的输出电压与给定的参考电压电压u
ref
相等,不需要额外的电机三相相电压补偿。u
ref
表示给定的参考电压。u
dc
表示直流母线电压。
[0100]
进入过调制:当时,采用常规的svpwm调制方法会导致输出的电压小于给定的电压,此时需要对电压进行补偿。
[0101]
本发明与传统过调制方式相比,不区分过调制一区和过调制二区,进入过调制后统一按照一种方法补偿相电压值,在上个周期svpwm调整中,由相电压计算出上个周期实际输出至逆变器的电压幅值v
so
(k-1)以及参考电压幅值vs(k-1)。
[0102]
当通过计算发现上一个周期的逆变器的输出电压小于给定的参考电压时,即判定本周期需要进行过调制,即直接对相电压进行补偿,加大相电压。
[0103]
本发明直接在相电压上补偿,能提高转矩响应能力,且与传统方法不同的在于,不用区分过调制一区和二区,理论上只要进入过调制,电压都可直接补偿,只要不超过相电压
的理论值即可,能快速进入六步工作模式。
[0104]
结合附图3,对本发明所述方法进行说明;
[0105]
通过matlab进行仿真,电机运行未进入过调制时,过调制算法模块输出的dq电压轨迹如图3圆形曲线;当电机运行进入过调制后,过调制算法模块输出的dq电压很快进入非圆形轨迹曲线,且能沿着六边形顶点运行在六步模式。
[0106]
结合附图4a、图4b,对本发明所述方法进行说明;
[0107]
通过matlab进行仿真,在电机运行进入弱磁后,本发明的过调制算法会进行工作,在同样的转速下同样的参数进行对比,本发明的过调制算法能提高电机外特性。
[0108]
进一步的选取某个工况点进行说明,电机转速在6500rpm,给定负载力矩大于该转速下的电机外特性,仿真发现图4a的转速降低到4477rpm,图4b的转速降低到4963rpm。
[0109]
结合附图5a、图5b,对本发明所述方法进行说明;
[0110]
通过matlab进行仿真,电机额定转速4200rpm,当电机运行在5000rpm时会进入弱磁,此时本发明的过调制算法会进行工作,初始电机负载为0nm,在1s时电机负载阶跃到70nm。
[0111]
进一步对仿真波形进行说明,图5a是没有过调制算法,电机负载阶跃变化后,转速在1.12s达到稳定,同样工况,图5b是开启了本发明的过调制算法,转速在1.06s达到稳定,稳定时间短于图5a。很明显,本发明的过调制算法提高了转矩响应能力。
[0112]
上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1