一种输电线跨越障碍物的巡检机器人及其工作方法与流程
1.本发明涉及巡检机器人技术领域,具体涉及一种输电线跨越障碍物的巡检机器人及其工作方法。
背景技术:
2.在室外架设的高压电网,由于受到户外环境影响,会出现老化、破损、粘附杂物等影响其稳定运行的状况,为了保证高压输电线安全稳定的运行,必须定期对高压输电线进行检修。原有的架空高压线路的检修普遍通过人工登高作业进行普查,由于我国电网架设量较大,且部分架设位置环境恶劣,通过人工巡检的工作任务量巨大,且巡检效率较低,登高作业存在一定风险,电网运行成本较高。
3.为克服人工巡检的一系列问题,市面上衍生出巡检机器人,其通过两组或多组行走机构挂装在线缆上,然后行走机构连接车体,车体上安装视频拍摄和传输设备,拍摄的视频传至远程终端,人员进行判别线缆状态,通过控制行走机构实现带动设备对线缆进行巡检;以上巡检方式存在以下问题:当巡检设备遇到线缆上带有障碍物时,障碍物可能是粘附的杂物或多股线缆间安装的间隔棒,巡检设备不能跨越障碍物,还得重新返回,影响巡检的效率。
4.基于上述问题,本发明提出一种输电线跨越障碍物的巡检机器人及其工作方法。
技术实现要素:
5.针对上述技术背景中的问题,本发明目的是提供一种输电线跨越障碍物的巡检机器人及其工作方法,系统的解决了背景技术中所提现有的线路架空巡检机器人面对电缆上障碍物时不能越障或通过能力较差的问题。
6.为了实现以上目的,本发明采用的技术方案为:
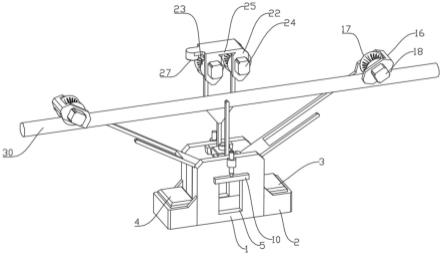
7.一种输电线跨越障碍物的巡检机器人,包括车体,所述车体两端对称安装有设备台,两侧的所述设备台上分别安装电池和控制设备,所述车体截面呈u型,同时所述车体中部上下滑动安装有呈工字形的滑动座,所述滑动座上方中部固定安装有支撑架,所述支撑架顶部安装有双行走轮单元;
8.所述滑动座两侧对称安装有转动架,所述转动架活动端安装有单行走轮单元;
9.所述转动架两侧的所述车体内侧面分别安装有外转限位块和内转限位块,所述滑动座向下移动时,所述外转限位块和所述内转限位块对所述转动架进行转动角度限位;
10.所述支撑架底部与顶部一侧安装有对线缆上下面进行拍摄的摄像组件。
11.进一步的,所述车体两侧板上对称设有贯穿槽,所述滑动座呈工字形的两端滑动卡装在两侧的所述贯穿槽上,所述车体两侧板上对称安装有控制所述滑动座升降的升降驱动机构。
12.更进一步的,所述升降驱动机构包括套筒以及安装在套筒上的电动伸缩杆,所述套筒安装在所述车体中部的外侧板上,所述电动伸缩杆的底端连接在所述滑动座外侧端的
中部。
13.更进一步的,所述滑动座上方中部通过设置上卡座固定安装所述支撑架,所述滑动座两侧对称设有侧转槽来转动安装所述转动架的一端。
14.更进一步的,所述转动架包括转板、第一连接板、第一防脱板和第一u型座,所述转板的一端转动安装在所述侧转槽内,所述转板的另一端前后分别安装有所述第一防脱板和所述第一连接板,所述第一连接板的外侧端连接所述第一u型座的一端,所述第一u型座上安装有所述单行走轮单元,所述第一u型座顶板两侧设有破面。
15.更进一步的,所述单行走轮单元包括转动安装在所述第一u型座内的侧车轮以及安装在所述第一u型座一侧面控制侧车轮转动的第一伺服电机。
16.更进一步的,所述支撑架包括底板、第二防脱板、y型件和两组第二u型座,所述底板顶部前后端分别安装有第二防脱板和y型件,所述y型件包括第二连接板、第二连接板顶部连接的梯形板以及梯形板顶部安装的两块第三连接板,所述第三连接板顶部连接所述第二u型座的一端,同时两组所述第二u型座间通过第四连接板连接,两组所述第二u型座上安装有所述双行走轮单元。
17.更进一步的,所述双行走轮单元包括两组分别转动安装在所述第二u型座内的上车轮以及安装在所述第二u型座一侧控制上车轮转动的第二伺服电机,所述上车轮轮面内凹同时具有多个防滑条。
18.更进一步的,所述摄像组件包括上摄像组件和下摄像组件,其中一个所述第二u型座顶板外侧通过连接上安装台来安装所述上摄像组件,所述底板上方中部通过下安装台来安装所述下摄像组件。
19.为解决以上问题,本发明同时提出巡检机器人跨越障碍物的工作方法,包括以下步骤:
20.s1、将巡检机器人安装在线缆上,使得两侧的侧车轮卡装在线缆上;
21.s2、通过控制两侧的电动伸缩杆提升滑动座至最顶部,使得两侧的侧车轮间距最大,此时线缆进入支撑架所包括的第二防脱板与第二连接板间,然后通过控制第一伺服电机带动侧车轮行走在线缆上;
22.s3、当遇到障碍物时,通过控制两侧的电动伸缩杆下降滑动座至最底部,在下降的过程中两侧的侧车轮脱离线缆,转而由两组上车轮卡装在线缆上,同时第二u型座外侧板底端位于线缆下方,通过控制两组第二伺服电机带动车体前进,使得位于前侧的上车轮贴近障碍物;
23.s4、通过控制两侧的电动伸缩杆提升滑动座至最顶部,滑动座提升的过程中,转动架向前进方向转动带动前侧的侧车轮跨越障碍物,同时上车轮脱离线缆,然后持续前进障碍物越过巡检机器人中部到达另一侧侧车轮;
24.s5、重复s3步骤持续前进完成另一侧侧车轮跨越障碍物,同时通过控制两侧的电动伸缩杆提升滑动座至最顶部复位,由此完成巡检机器人跨越障碍物动作。
25.与现有技术相比,本发明具有以下优点:
26.(1)在本发明中通过在车体中部上下滑动安装有呈工字形的滑动座,滑动座上方中部固定安装有支撑架,支撑架顶部安装有双行走轮单元;滑动座两侧对称安装有转动架,转动架活动端安装有单行走轮单元;转动架两侧的车体内侧面分别安装有外转限位块和内
转限位块,滑动座向下移动时,外转限位块和内转限位块对转动架进行转动角度限位;支撑架底部与顶部一侧安装有对线缆上下面进行拍摄的摄像组件;通过控制滑动座上下滑动来切换巡检机器人与线缆接触的双行走轮单元、单行走轮单元,常态行走状态下,巡检机器人依靠两侧的单行走轮单元进行行走,在前侧的单行走轮单元遇到障碍物时,通过控制滑动座向下滑动使得中部的双行走轮单元支撑在线缆上,两侧的单行走轮单元腾空,然后持续前进抵近障碍物后,控制滑动座向上滑动前侧的单行走轮单元越过障碍物后支撑在线缆上,然后双行走轮单元脱离线缆,如此重复步骤实现轻松跨越障碍物的目的,通过以上结构实现巡检机器人跨越障碍物的功能,提高了机器人巡检的越障能力。
附图说明
27.图1为本发明实施例提供的巡检机器人巡检状态立体图一;
28.图2为本发明实施例提供的巡检机器人巡检状态立体图二;
29.图3为本发明实施例提供的单行走轮单元和双行走轮单元状态切换过程中同时支撑在线缆上的立体图;
30.图4为本发明实施例提供的单行走轮单元脱离线缆状态立体图;
31.图5为本发明实施例提供的车体立体图;
32.图6为本发明实施例提供的滑动座立体图;
33.图7为本发明实施例提供的支撑架和转动架安装在滑动座上立体图;
34.图8为本发明实施例提供的支撑架安装双行走轮单元立体图。
35.图中:1、车体;2、设备台;3、电池;4、控制设备;5、贯穿槽;6、外转限位块;7、内转限位块;8、套筒;9、电动伸缩杆;10、滑动座;11、侧转槽;12、上卡座;13、转板;14、第一连接板;15、第一防脱板;16、第一u型座;17、侧车轮;18、第一伺服电机;19、底板;20、第二防脱板;21、第二连接板;211、梯形板;212、第三连接板;22、第二u型座;23、上车轮;24、第二伺服电机;25、第四连接板;26、上安装台;27、上摄像组件;28、下安装台;29、下摄像组件;30、线缆。
具体实施方式
36.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
37.实施例一
38.如图1-8所示,一种输电线跨越障碍物的巡检机器人,包括车体1,车体1两端对称安装有设备台2,两侧的设备台2上分别安装电池3和控制设备4,控制设备4包括现有的驱动控制器、处理器和远程通讯装置等现有设备,车体1截面呈u型,同时车体1中部上下滑动安装有呈工字形的滑动座10,通过设置成工字形增加滑动的稳定性,滑动座10上方中部固定安装有支撑架,支撑架顶部安装有双行走轮单元;滑动座10两侧对称安装有转动架,转动架活动端安装有单行走轮单元;转动架两侧的车体1内侧面分别安装有外转限位块6和内转限位块7,滑动座10向下移动时,外转限位块6和内转限位块7对转动架进行转动角度限位;支撑架底部与顶部一侧安装有对线缆30上下面进行拍摄的摄像组件,通过控制滑动座10上下滑动来切换巡检机器人与线缆接触的双行走轮单元、单行走轮单元,常态行走状态下,巡检机器人依靠两侧的单行走轮单元进行行走,在前侧的单行走轮单元遇到障碍物时,通过控
制滑动座10向下滑动使得中部的双行走轮单元支撑在线缆上,两侧的单行走轮单元腾空,然后持续前进抵近障碍物后,控制滑动座10向上滑动前侧的单行走轮单元越过障碍物后支撑在线缆上,然后双行走轮单元脱离线缆,如此重复步骤实现轻松跨越障碍物的目的。
39.设计思路:相较于传统固定安装的行走机构,通过设置可交替支撑在线缆30上的双行走轮单元和两组单行走轮单元,常态下行走依靠两侧的两组单行走轮单元,遇到障碍物时,切换双行走轮单元支撑在线缆上,同时利用前后排列的特点进行逐个越障,以此完成跨越障碍物的动作。
40.如图1、2、5、6所示,车体1两侧板上对称设有贯穿槽5,滑动座10呈工字形的两端滑动卡装在两侧的贯穿槽5上,车体1两侧板上对称安装有控制滑动座10升降的升降驱动机构,通过设置呈工字形的滑动座10卡装在两侧的贯穿槽5内增加滑动的稳定性,同时通过升降驱动机构控制滑动座10上下滑动,完成双行走轮单元和两组单行走轮单元支撑在线缆30上的切换。
41.如图2、5所示,升降驱动机构包括套筒8以及安装在套筒8上的电动伸缩杆9,套筒8安装在车体1中部的外侧板上,电动伸缩杆9的底端连接在滑动座10外侧端的中部,通过控制电动伸缩杆9的升降带动滑动座10的升降,电动伸缩杆9控制升降平稳。
42.如图6、7所示,滑动座10上方中部通过设置上卡座12固定安装支撑架,滑动座10两侧对称设有侧转槽11来转动安装转动架的一端,通过转动安装转动架便于在升降过程中调节转动架的仰角,以此实现切换双行走轮单元和两组单行走轮单元支撑在线缆30上的功能。
43.如图3、7所示,转动架包括转板13、第一连接板14、第一防脱板15和第一u型座16,转板13的一端转动安装在侧转槽11内,通过设置第一防脱板15在转板13转至顶部切换双行走轮单元时对线缆进行卡入,放置巡检机器人脱缰,增加了运行的安全防护性,转板13的另一端前后分别安装有第一防脱板15和第一连接板14,第一连接板14的外侧端连接第一u型座16的一端,第一u型座16上安装有单行走轮单元,第一u型座16顶板两侧设有破面,通过设置破面放置倾斜时侧面对线缆30进行摩擦。
44.如图1-4所示,单行走轮单元包括转动安装在第一u型座16内的侧车轮17以及安装在第一u型座16一侧面控制侧车轮17转动的第一伺服电机18,通过第一伺服电机18带动侧车轮17转动实现巡检机器人行走的功能。
45.如图8所示,支撑架包括底板19、第二防脱板20、y型件和两组第二u型座22,底板19顶部前后端分别安装有第二防脱板20和y型件,在支撑架相对于线缆上升的过程中,通过设置第二防脱板20防止线缆30脱缰,增加行走时的安全防护性能,y型件包括第二连接板21、第二连接板21顶部连接的梯形板211以及梯形板211顶部安装的两块第三连接板212,第三连接板212顶部连接第二u型座22的一端,同时两组第二u型座22间通过第四连接板25连接,两组第二u型座22上安装有双行走轮单元,通过设置;两组第二u型座22安装双行走轮单元增加切换行走的稳定性。
46.如图8所示,双行走轮单元包括两组分别转动安装在第二u型座22内的上车轮23以及安装在第二u型座22一侧控制上车轮23转动的第二伺服电机24,通过第二伺服电机24控制上车轮23转动,实现行走的目的,上车轮23轮面内凹同时具有多个防滑条,通过设置防滑条增加行走时的稳定性,避免设备打滑。
47.如图8所示,摄像组件包括上摄像组件27和下摄像组件29,其中一个第二u型座22顶板外侧通过连接上安装台26来安装上摄像组件27,底板19上方中部通过下安装台28来安装下摄像组件29,通过上下分布设置上摄像组件27和下摄像组件29实现对线缆30的全包围拍摄检测。
48.实施例二
49.一种输电线跨越障碍物的巡检机器人的工作方法,实施例一中的巡检机器人,跨越障碍物步骤包括以下步骤:
50.s1、将巡检机器人安装在线缆30上,使得两侧的侧车轮17卡装在线缆30上;
51.s2、通过控制两侧的电动伸缩杆9提升滑动座10至最顶部,使得两侧的侧车轮17间距最大,此时线缆进入支撑架所包括的第二防脱板20与第二连接板21间,然后通过控制第一伺服电机18带动侧车轮17行走在线缆30上;
52.s3、当遇到障碍物时,通过控制两侧的电动伸缩杆9下降滑动座10至最底部,在下降的过程中两侧的侧车轮17脱离线缆30,转而由两组上车轮23卡装在线缆30上,同时第二u型座22外侧板底端位于线缆30下方,通过控制两组第二伺服电机24带动车体前进,使得位于前侧的上车轮23贴近障碍物;
53.s4、通过控制两侧的电动伸缩杆9提升滑动座10至最顶部,滑动座10提升的过程中,转动架向前进方向转动带动前侧的侧车轮17跨越障碍物,同时上车轮23脱离线缆30,然后持续前进障碍物越过巡检机器人中部到达另一侧侧车轮17;
54.s5、重复s3步骤持续前进完成另一侧侧车轮17跨越障碍物,同时通过控制两侧的电动伸缩杆9提升滑动座10至最顶部复位,由此完成巡检机器人跨越障碍物动作。
55.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1