一种马达供电方法及电子设备与流程
本技术涉及计算机,尤其涉及一种马达供电方法及电子设备。
背景技术:
1、随着电子设备的摄像头的演进,高质量成片的需求增加,复杂算法与复杂器件的使用也随之增加,然而电子设备的电池容量仍然受限于电子设备的尺寸,因此如何降低设备功耗是目前亟需解决的问题,其中,目前业界并未基于摄像头中的马达的供电方式考虑功耗优化措施。
技术实现思路
1、本技术公开了一种马达供电方法及电子设备,可以优化电子设备的摄像头中的马达的供电方式,从而节省电子设备的功耗。
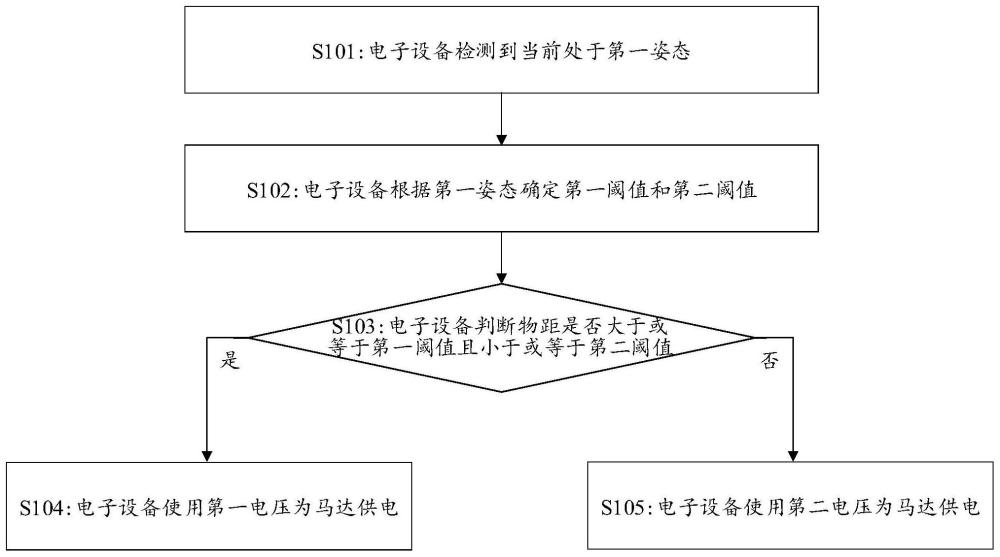
2、第一方面,本技术提供了一种马达供电方法,应用于电子设备,所述电子设备包括摄像头,所述摄像头包括马达,该方法包括:检测到所述电子设备处于第一姿态;确定所述第一姿态对应的物距阈值;检测到第一物距,根据所述第一物距和所述物距阈值的关系确定供电电压;使用所述供电电压为所述马达供电。
3、例如,第一姿态为水平姿态、向上姿态或向下姿态。
4、在上述方法中,电子设备可以实时检测当前所处的姿态,并根据当前姿态确定对应的物距阈值,再根据实时检测到的第一物距和该物距阈值的关系动态调整马达的供电电压,可以理解为是马达的供电电压和当前姿态、当前物距匹配,避免供电电压为盈余状态的情况,既满足马达的供电需求,又节省了设备功耗,从而提升了设备的整体性能。
5、在一种可能的实现方式中,所述物距阈值包括第一阈值和第二阈值;所述根据所述第一物距和所述物距阈值的关系确定供电电压,包括:当所述第一物距大于或等于所述第一阈值且小于或等于所述第二阈值时,确定所述供电电压为第一电压;当所述第一物距小于所述第一阈值或大于所述第二阈值时,确定所述供电电压为第二电压,所述第一电压小于所述第二电压。
6、在上述方法中,当前的第一物距大于或等于第一阈值且小于或等于第二阈值时,可以将马达的供电电压设置为较小的第一电压,避免使用较大的第二电压造成供电电压盈余的情况,节省设备功耗。
7、在一种可能的实现方式中,所述确定所述第一姿态对应的物距阈值,包括:确定第一关系,所述第一关系为所述电子设备处于所述第一姿态时所述马达的工作电流和物距的对应关系;根据所述第一关系确定所述第一阈值和所述第二阈值,所述第一阈值和所述第二阈值为所述第一关系中和第一电流对应的两个物距,所述第一电流为所述第一电压能提供的最大电流。
8、例如,第一电压能提供的最大电流表征为[-i1,i1],i1称为该第一电压能提供的最大电流,即第一电流,i1为正数。
9、在上述方法中,电子设备根据第一姿态下马达的工作电流和物距的对应关系确定第一阈值和第二阈值,可以理解为是物距阈值和马达的实际工作情况匹配,马达的供电方式更加精细化,进一步节省了设备功耗。
10、在一种可能的实现方式中,所述第一电压是所述马达的宽电压工作范围内小于或等于第一电压阈值的电压,所述第二电压是所述宽电压工作范围内大于第二电压阈值的电压,所述第二电压阈值大于或等于所述第一电压阈值;当使用所述宽电压工作范围内的电压为所述马达供电时,所述马达处于正常工作的状态。
11、例如,马达的宽电压工作范围内小于或等于第一电压阈值的电压属于低电压范围,马达的宽电压工作范围内大于第二电压阈值的电压属于高电压范围。在上述方法中,第一电压可以是低电压范围内的任意一个电压,第二电压可以是高电压范围内的任意一个电压,开发者或者电子设备可以根据实际情况确定第一电压和第二电压,实现方式更加灵活,拓宽了应用场景。
12、在一种可能的实现方式中,所述物距阈值包括第一阈值和第二阈值;所述根据所述第一物距和所述物距阈值的关系确定供电电压,包括:当所述第一物距大于或等于所述第一阈值且小于或等于所述第二阈值时,确定所述供电电压为第一电压范围内的第三电压;当所述第一物距小于所述第一阈值或大于所述第二阈值时,确定所述供电电压为第二电压范围内的第四电压,所述第一电压范围中最大的电压小于或等于所述第二电压范围中最小的电压。
13、在上述方法中,当前物距大于或等于第一阈值且小于或等于第二阈值时,可以将马达的供电电压设置为较小的第一电压范围内的一个电压,避免使用较大的第二电压范围内的电压造成供电电压盈余的情况,节省设备功耗。
14、在一种可能的实现方式中,所述确定所述第一姿态对应的物距阈值,包括:确定第一关系,所述第一关系为所述电子设备处于所述第一姿态时所述马达的工作电流和物距的对应关系;根据所述第一关系确定所述第一阈值和所述第二阈值,所述第一阈值和所述第二阈值为所述第一关系中和第二电流对应的两个物距,所述第二电流为第五电压能提供的最大电流,所述第五电压为所述第一电压范围中最大的电压。
15、在上述方法中,电子设备根据第一姿态下马达的工作电流和物距的对应关系确定第一阈值和第二阈值,可以理解为是物距阈值和马达的实际工作情况匹配,马达的供电方式更加精细化,进一步节省了设备功耗。
16、在一种可能的实现方式中,所述确定所述供电电压为第一电压范围内的第三电压,包括:确定第一关系,所述第一关系为所述电子设备处于所述第一姿态时所述马达的工作电流和物距的对应关系;根据所述第一物距和所述第一关系确定第三电流,所述第三电流为所述第一关系中和所述第一物距对应的电流;根据所述第三电流在所述第一电压范围内确定第三电压,所述第三电压能提供的最大电流为所述第三电流。
17、在上述方法中,电子设备根据当前的第一物距和第一关系确定当前实际所需的工作电流,(即第三电流),再从第一电压范围中确定出能提供的最大电流为第三电流的第三电压以为马达供电,可以理解为是供电电压和马达的实际工作情况完全匹配,马达的供电方式更加精细化,进一步节省了电子设备的功耗。
18、在一种可能的实现方式中,在不同物距下所述马达的工作电流不同,当检测到的物距等于第三阈值时,所述马达的工作电流为0,当检测到的物距小于第三阈值时,所述马达的工作电流大于0,当检测到的物距大于第三阈值时,所述马达的工作电流小于0,其中,所述马达的工作电流大于0时,所述摄像头中的镜头处于相对中间位置偏向物侧的位置,所述马达的工作电流小于0时,所述摄像头中的镜头处于相对中间位置偏向像侧的位置。
19、在上述方法中,马达属于中置马达,因此,第一关系中一个马达的工作电流对应两个物距,即该电流为正和为负时分别对应的两个物距。上述物距阈值包括根据第一关系和第一电流确定的第一阈值和第二阈值,物距阈值的确定方式充分考虑到了中置马达的特性,从而使得本技术可以应用于中置马达的全部工作场景,应用场景更加广泛。
20、在一种可能的实现方式中,所述马达为弹片式马达。
21、第二方面,本技术提供了又一种马达供电方法,应用于电子设备,所述电子设备包括摄像头,所述摄像头包括马达和镜头,该方法包括:启动所述马达;使用第一电压为所述马达供电;向所述马达发送第一指令,所述第一指令用于控制所述马达推动所述镜头移动;当所述镜头的位置满足预设条件,和/或,当前时刻和发送所述第一指令的时刻的差值大于或等于第一时长时,使用第二电压为所述马达供电,所述第一电压大于所述第二电压。
22、例如,第一电压为马达的宽电压工作范围内大于或等于第三电压阈值的电压,第二电压为马达的宽电压工作范围内小于第四电压阈值的电压,第三电压阈值大于或等于第四电压阈值;当使用宽电压工作范围内的电压为马达供电时,马达处于正常工作的状态。
23、在上述方法中,电子设备启动马达后,使用较大的第一电压为马达供电(此时可以称马达处于启动态),并控制马达推动镜头移动以进行对焦,当镜头的位置满足预设条件,和/或,向马达发送第一指令后延时第一时长时,电子设备完成对焦,可以使用较小的第二电压为马达供电(此时可以称马达处于稳定态),避免仍然使用第一电压造成供电电压盈余的情况,电子设备可以根据马达不同的工作状态为马达提供不同的电压,在满足马达供电需求的同时,有效节省了电子设备的功耗。
24、在一种可能的实现方式中,所述预设条件包括所述镜头的位置与预设位置的距离小于或等于第一预设阈值。
25、例如,预设位置为镜头能够完成对焦所处的位置或位置区间。
26、在上述方法中,当镜头的位置满足预设条件时,电子设备完成对焦,电子设备将供电电压由第一电压切换为第二电压,并使用第二电压为马达供电,满足马达供电需求的同时,有效节省了电子设备的功耗。
27、在一种可能的实现方式中,所述使用第二电压为所述马达供电之后,所述方法还包括:接收到对焦指令时,使用所述第一电压为所述马达供电;向所述马达发送第二指令,所述第二指令用于控制所述马达推动所述镜头移动。
28、例如,电子设备接收到用于手动对焦的用户操作时,接收到对焦指令。
29、例如,电子设备检测到处于需进行自动对焦的场景时,接收到对焦指令。
30、在上述方法中,电子设备使用较小的第二电压为马达供电时,若接收到对焦指令,可以将供电电压由第二电压切换为较大的第一电压,使用第一电压控制马达推动镜头移动以重新完成对焦,也就是说,电子设备可以实时监控对焦指令,在需要对焦时及时调整马达的供电电压,节省功耗的同时,保证马达的正常工作。
31、在一种可能的实现方式中,所述使用第二电压为所述马达供电之后,所述方法还包括:检测所述镜头移动;当所述镜头的偏移距离大于或等于第二预设阈值时,使用所述第一电压为所述马达供电,所述偏移距离为所述镜头移动后所处的位置和所述使用第二电压为所述马达供电时所述镜头所处的位置之间的距离;向所述马达发送第三指令,所述第三指令用于控制所述马达推动所述镜头移动。
32、在上述方法中,电子设备可以实时检测镜头的偏移距离,当偏移距离大于或等于第二预设阈值时,将供电电压由第二电压切换为较大的第一电压以校正镜头的位置,从而解决在外界振动导致镜头甩出原本位置时,使用较小的第二电压无法使镜头回位至原本位置的异常情况,提升设备的稳定性。
33、在一种可能的实现方式中,所述马达启动后的第二时长内所述马达的工作电流的变化幅度大于或等于幅度阈值,所述马达启动的所述第二时长后所述马达的工作电流的变化幅度小于所述幅度阈值。
34、在上述方法中,马达属于摩擦式马达(例如滚珠类马达或滑杆式马达),上述第一电压和第二电压的使用场景是和马达实际的工作电流匹配的,在节省设备功耗的同时,保证了马达的正常工作。
35、在一种可能的实现方式中,所述马达为摩擦式马达。
36、第三方面,本技术提供了一种电子设备,包括通信接口、处理器和存储器,上述存储器用于存储计算机程序,上述处理器调用上述计算机程序,用于执行上述任一方面任意一种可能的实现方式中的马达供电方法。
37、第四方面,本技术提供了一种电子设备,包括一个或多个处理器和一个或多个存储器。该一个或多个存储器与一个或多个处理器耦合,一个或多个存储器用于存储计算机程序代码,计算机程序代码包括计算机指令,当一个或多个处理器执行计算机指令时,使得电子设备执行上述任一方面任一项可能的实现方式中的马达供电方法。
38、第五方面,本技术提供了一种计算机存储介质,该计算机存储介质存储有计算机程序,该计算机程序被处理器执行时,实现执行上述任一方面任一项可能的实现方式中的马达供电方法。
39、第六方面,本技术提供了一种计算机程序产品,当该计算机程序产品在电子设备上运行时,使得该电子设备执行上述任一方面任一项可能的实现方式中的马达供电方法。
40、第七方面,本技术提供一种电子设备,该电子设备包括执行本技术任一种实现方式所介绍的方法或装置。上述电子设备例如为芯片。
- 还没有人留言评论。精彩留言会获得点赞!