一种纵弯模态复合的四足多自由度超声电机及其激励方法
本发明涉及超声电机,尤其涉及一种纵弯模态复合的四足多自由度超声电机及其激励方法。
背景技术:
1、在机器人技术、光学仪器、医疗器械等精密驱动领域中,对作动器的品质有了更多的限制和要求,要求作动器能够实现多自由度运动、定位精度高以及易于小型化,传统的多自由度是使用多台单自由度旋转电机串联以及复杂的传动机构来实现多自由度会导致体积庞大、结构复杂、误差失控和难以小型化。
技术实现思路
1、本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种纵弯模态复合的四足多自由度超声电机及其激励方法。
2、本发明为解决上述技术问题采用以下技术方案:
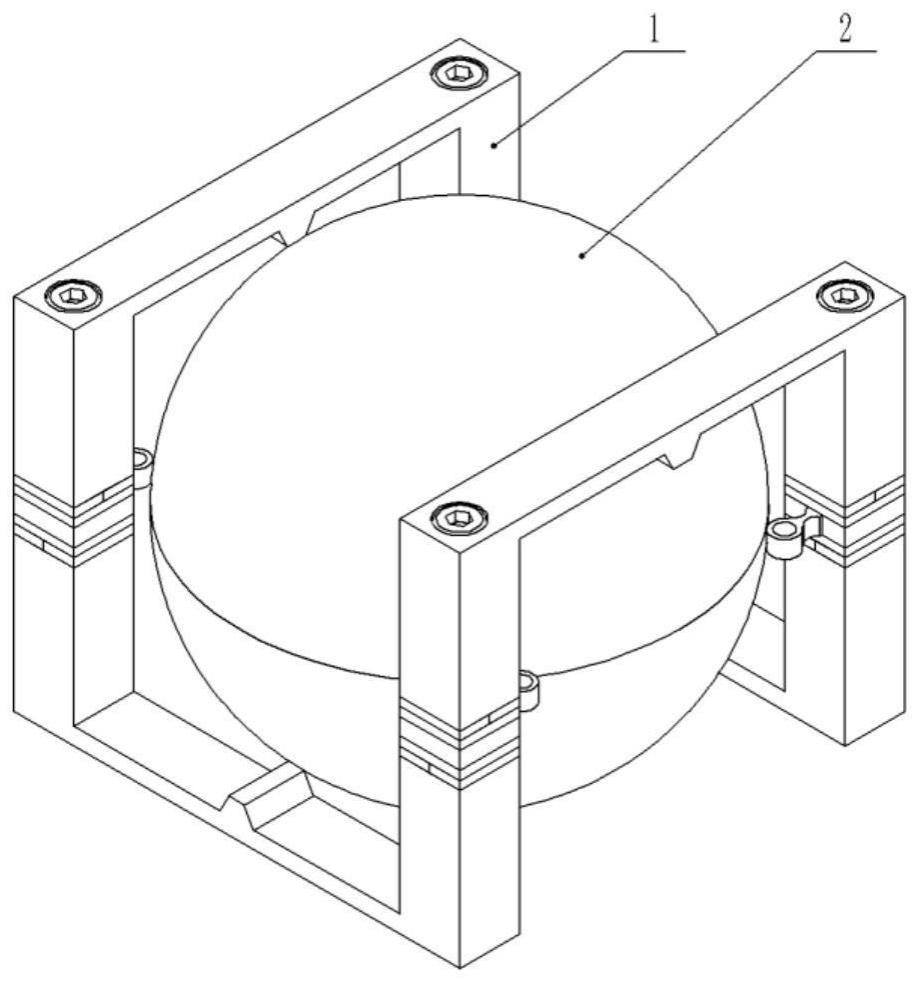
3、一种纵弯模态复合的四足多自由度超声电机,包含压电振子和球形转子;
4、所述压电振子包含第一至第四振动梁、以及第一至第四横梁;
5、所述第一至第四振动梁结构相同,均包含上梁、夹持件、下梁、第一至第四压电陶片、以及预紧螺栓;
6、所述上梁、下梁为形状相同的正四棱柱,上梁的上端沿其轴线设有和所述预紧螺栓相匹配的沉头通孔,下梁上端的中心设有和所述预紧螺栓相匹配的螺纹盲孔;
7、所述夹持件结构包含夹持部、柔性铰链和限位部,所述夹持部为横截面和上梁横截面形状相同的正四棱柱;所述限位部为上开下口的空心圆柱体;所述限位部的侧壁通过所述柔性铰链和所述夹持部的一个侧壁的中心垂直固连,使得限位部的轴线平行于夹持部的轴线,且所述夹持部沿其轴线设有供所述预紧螺栓穿过的通孔;
8、所述第一至四压电陶片的形状和所述上梁横截面的形状相同,中心均设有供所述预紧螺栓穿过的通孔,且第一、第四压电陶瓷片采用二分区压电陶瓷片,第二、第三压电陶瓷片采用单分区压电陶瓷片;
9、所述预紧螺栓从上梁的沉头通孔穿入,依次穿过第一压电陶瓷片、第二压电陶瓷片、夹持部、第三压电陶瓷片、第四压电陶瓷片上的通孔后和所述下梁的螺纹盲孔螺纹相连,将第一压电陶瓷片、第二压电陶瓷片、夹持部、第三压电陶瓷片、第四压电陶瓷片夹紧在上梁、下梁之间,第一、第四压电陶瓷片的分界线相互垂直;所述第二、第三压电陶瓷片的极化方向均沿厚度方向朝下;所述第一、第四压电陶瓷片均沿厚度方向极化,且两个分区的极化方向相反;
10、所述第一、第二振动梁的上端分别和第一横梁的两端垂直固连,第三、第四振动梁的两端分别和第二横梁的两端垂直固连,第一、第四振动梁的下端分别和第三横梁的两端垂直固连,第二、第三振动梁的下端分别和第四横梁的两端垂直固连;第一横梁下端面、第二横梁下端面、第三横梁上端面、第四横梁上端面的中心处均设有凸起的驱动足;所述第一、第二振动梁的夹持件相向,第三、第四振动梁的夹持件相向;
11、所述第一至第四振动梁的第一压电陶瓷片的分界线相互平行,均垂直于所述第一横梁;所述第一振动梁第一压电陶瓷片远离第二振动梁的分区、第一振动梁第四压电陶瓷片远离第四振动梁的分区、第二振动梁第一压电陶瓷片靠近第一振动梁的分区、第二振动梁第四压电陶瓷片远离第三振动梁的分区、第三振动梁第一压电陶瓷片靠近第四振动梁的分区、第三振动梁第四压电陶瓷片靠近第二振动梁的分区、第四振动梁第一压电陶瓷片远离第三振动梁的分区、第四振动梁第四压电陶瓷片靠近第一振动梁的分区均沿厚度方向朝上极化;
12、所述球形转子包含第一球壳、第二球壳和预紧模块;
13、所述第一至第二球壳结构相同,均为高度等于半径的空心半球体;
14、所述预紧模块包含第一固定筒、第二固定筒、预紧弹簧、以及n个限位销,n为大于等于3的自然数;
15、所述第一固定筒、第二固定筒为结构相同的圆柱体,其中,所述第一固定筒一端和所述第一球壳内壁的中心固连,第一固定筒的轴线经过第一球壳的球心;第二固定筒一端和所述第二球壳内壁的中心固连,第二固定筒的轴线经过第二球壳的球心;
16、所述n个限位销周向均匀设置在所述第一固定筒靠近第一球壳球心的端面上,均和第一固定筒靠近第一球壳球心的的端面垂直固连;
17、所述第二固定筒靠近第二球壳球心的端面上周向设有n个和所述限位销一一对应配合的限位孔;
18、所述第一球壳、第二球壳均置于所述压电振子中;所述第一球壳的边缘和第二球壳的边缘贴合,第一固定筒上的n个限位销一一对应插入第二固定筒上的n个限位孔中;所述预紧弹簧设置在n个限位销中间,一端和所述第一固定筒相抵、另一端和所述第二固定筒相抵,使得球形转子的外表分别和第一至第四横梁上的驱动足、第一至第四振动梁的限位部相抵。
19、作为本发明一种纵弯模态复合的四足多自由度超声电机进一步的优化方案,所述驱动足为横截面为等腰梯形的柱体,包含两个呈等腰梯形的端面、以及依次首位相连的第一至第四侧面;驱动足的第一侧面的面积小于其第三侧面;驱动足的第三侧面和驱动足所在横梁固连、两个端面分别和驱动足所在横梁的两侧共面。
20、作为本发明一种纵弯模态复合的四足多自由度超声电机进一步的优化方案,所述n取4。
21、本发明还公开了一种该纵弯模态复合的四足多自由度超声电机的激励方法,包含以下步骤:
22、令球形转子的球心为笛卡尔坐标原点,从第二振动梁沿着第一横梁指向第一振动梁的方向为x轴正方向,从第一振动梁沿着第三横梁指向第二振动梁的方向为y轴正方向,沿着第一振动梁朝上的方向为z轴正方向;并令第一至第四振动梁的第一压电陶瓷片为第一压电陶瓷片组,第一至第四振动梁的第二、第三压电陶瓷片为第二压电陶瓷片组,第一至第四振动梁的第四压电陶瓷片为第三压电陶瓷片组;
23、如果需要驱动球形转子绕x轴旋转:
24、对第三压电陶瓷片组施加第一激励信号,对第二压电陶瓷片组施加第二激励信号,所述第一、二激励信号均为同频幅值相等的交流谐波信号,其中,第一激励信号在时间相位差上超前第二激励信号π/2,使压电振子上同时激发出一阶纵振模态和y轴方向的三阶弯振模态,通过一阶纵振模态和三阶弯振模态的耦合振动,压电振子的驱动足表面质点产生垂直于x轴的微幅椭圆运动,经摩擦作用驱动球形转子绕x轴旋转;如果需要绕x轴反向旋转,将第二激励信号取反即可;
25、如果需要驱动球形转子绕y轴旋转:
26、对第一压电陶瓷片组施加第一激励信号,对第二压电陶瓷片组施加第二激励信号,所述第一、二激励信号均为同频幅值相等的交流谐波信号,其中,第一激励信号在时间相位差上超前第二激励信号π/2,使压电振子上同时激发出一阶纵振模态和x轴方向的三阶弯振模态,通过一阶纵振模态和三阶弯振模态的耦合振动,压电振子的驱动足表面质点产生垂直于y轴的微幅椭圆运动,经摩擦作用驱动球形转子绕y轴旋转;如果需要绕y轴反向旋转,将第二激励信号取反即可;
27、如果需要驱动球形转子绕z轴旋转:
28、对第三压电陶瓷片组施加第一激励信号,对第一压电陶瓷片组施加第二激励信号,
29、所述第一、二激励信号均为同频幅值相等的交流谐波信号,其中,第一激励信号在时间相位差上超前第二激励信号π/2,使压电振子上同时激发出两个互相正交的三阶弯振模态,通过两个正交的三阶弯振模态的耦合振动,压电振子的驱动足表面质点产生垂直于z轴的微幅椭圆运动,经摩擦作用驱动球形转子绕z轴旋转;如果需要绕z轴反向旋转,将第二激励信号取反即可。
30、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
31、1. 结构简单紧凑,易于调节预压力和无复杂的传动结构;
32、2. 采用压电驱动技术直接驱动球形转子实现三自由度旋转,且易于实现轻量化。
- 还没有人留言评论。精彩留言会获得点赞!