直流无刷电机、机器人及检测直流无刷电机转速的方法
1.本发明属于电机控制技术领域,具体是直流无刷电机、机器人及检测直流无刷电机转速的方法。
背景技术:
2.无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有霍尔传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等,电机的性能是转子的速率跟踪精度以及稳速精度的决定性因素,作用于系统整体的姿态敏感精度和控制力矩精度。
3.例如中国专利,公告号为cn 102088234 b的专利公开了一种无刷直流电机,包括定子和可相对定子旋转的转子,所述定子包括4n个凸出的齿及位于相邻齿间的槽,两相绕组分别位于相应的槽内,每相绕组跨越至少两个齿,所述转子包括由永久磁铁形成的6n个磁极,n为大于等于1的正整数。所述绕组采用90度电角度驱动,两相绕组的电角度相位差为90度,在每一段时间内只有一相绕组通电,且同一槽内的线圈的电流方向相同。
4.该发明采用定子铁芯结构,电机高速运转时存在较大磁滞和涡流损耗,其定子上的凹槽会导致电机运转时产生齿槽转矩脉动,降低了电机力矩精度,因此,我们提出了一种直流无刷电机、机器人及检测直流无刷电机转速的方法。
技术实现要素:
5.为了解决现有技术中定子影响电机导致转矩脉动增大的问题,本发明的目的是提供直流无刷电机、机器人及检测直流无刷电机转速的方法。
6.为了实现上述目的,本发明的技术方案如下:直流无刷电机,包括外壳和置于外壳内部的电机轴,电机轴中部固定套接有转子,转子以转子中心轴为中心沿其周向设有定子,定子包括外定子和内定子,内定子通过多相绕组与转子连接,外定子靠近内定子一侧依次设有内圈永磁体和内圈导磁环,外定子远离内定子一侧依次设有外圈永磁体和外圈导磁环,内定子、内圈导磁环、内圈永磁体、外定子、外圈永磁体和外圈导磁环之间留有气隙,内圈导磁环设有容置孔,内定子外侧壁设有一体成型的限位块,限位块与容置孔抵触,内定子尾端同轴固定连接有线路板,转子、定子和线路板均置于外壳内。
7.上述方案的原理:转子带动电机轴高速稳定旋转,通过外圈永磁体和内圈永磁体产生恒定的永磁磁场,利用多相绕组与永磁磁场相互作用产生力矩,驱动转子高速旋转;本发明的永磁回路为:磁通从外圈永磁体的n极出发,穿过气隙到达正对的内圈永磁体的s极,再由内圈永磁体的n极出发,经过内圈导磁环到达相邻内圈永磁体的s极,从相邻内圈永磁
体的n极流出,穿过气隙到达正对相邻外圈永磁体的s极,再由相邻外圈永磁体的n极流出,经过外圈导磁环回到外圈永磁体的s极,由此构成闭合磁回路。
8.采用上述方案后实现了以下有益效果:
9.本发明与现有技术相比,由外圈永磁体和内圈永磁体产生恒定的永磁磁场,从而产生闭合磁回路,可大幅减少传统单圈切向方向上的漏磁,增大气隙有效磁密方向的磁密,增大设计电机转矩,在相同转矩时能大幅减少功耗,使电机极间磁密更加均匀,减少转矩脉动。
10.进一步,线路板上设有三相霍尔传感器。
11.有益效果:线路板上设有三相霍尔传感器可以检测转子位置,在转子换相时产生跳变信号。
12.进一步,外壳包括主壳体、设置于主壳体两端的第一端盖和第二端盖,主壳体与外圈导磁环相抵,主壳体两端沿壳体边缘均设有若干内螺纹孔,第一端盖和第二端盖靠近主壳体一侧沿其边缘均设有若干通孔,第一端盖和第二端盖均通过螺钉穿过通孔与主壳体螺纹连接,第二端盖以圆心为中心开有轴孔,电机轴贯穿轴孔。
13.有益效果:可以将电机主体包裹在外壳内,避免电机主体受外界环境影响导致使用寿命缩短。
14.进一步,线路板沿其周向设有绝缘环。
15.有益效果:线路板沿其周向设有绝缘环,可以达到隔电作用,同时还有固定线路板的作用。
16.进一步,一种机器人,包括控制中心、摄像装置及权利要求1-4任意一项所述的直流无刷电机,控制中心、摄像装置和直流无刷电机串联,控制中心与定子之间耦接有逆变驱动电路,逆变驱动电路与定子之间耦接有过零检测电路,三相霍尔传感器与控制中心耦接。
17.有益效果:直流无刷电机驱动摄像装置移动,逆变驱动电路,可以驱动定子绕组换相;过零检测电路,可以检测直流无刷电机的过零点,并产生过零点信号,控制中心根据三相霍尔传感器产生的跳变信号及过零检测电路产生的过零点信号,经过计算得到转子转速。
18.进一步,还包括转速仪表盘,转速仪表盘与控制中心通过电力线连接。
19.有益效果:转速仪表盘显示电机转速更为直观。
20.进一步,一种检测直流无刷电机转速的方法,根据权利要求5-6所述的机器人用于检测直流无刷电机转速的方法,包括如下步骤:
21.s1、检测直流无刷电机的过零信号及换相跳变信号;
22.s2、记录过零信号及换相跳变信号的产生时间;
23.s3、根据产生时间,测算直流无刷电机的转速。
24.有益效果:本方法利用过零点信号与三相霍尔传感器检测的跳变信号结合,将获取转子位置的时间缩短,加快了获取转子转速的速度,使直流无刷电机的转速控制更平滑。
附图说明
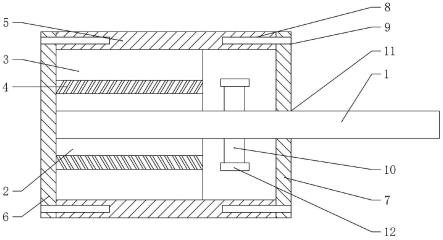
25.图1为本发明实施例直流无刷电机的剖面图。
26.图2为本发明实施例定子的剖面图。
27.图3为本发明实施例的检测直流无刷电机转速的模块示意图。
具体实施方式
28.下面通过具体实施方式进一步详细说明:
29.说明书附图中的附图标记包括:电机轴1、转子2、定子3、多相绕组4、主壳体5、第一端盖6、第二端盖7、内螺纹孔8、通孔9、线路板10、轴孔11、绝缘环12、内定子31、内圈导磁环32、内圈永磁体33、外定子34、外圈永磁体35、外圈导磁环36、容置孔37、限位块38。
30.实施例基本如附图1-图3所示:
31.直流无刷电机,包括外壳和置于外壳内部的电机轴1,电机轴1中部固定套接有转子2,转子2以转子2中心轴为中心沿其周向设有定子3,定子3包括外定子34和内定子31,内定子31通过多相绕组4与转子2连接,外定子34靠近内定子31一侧依次设有内圈永磁体33和内圈导磁环32,外定子34远离内定子31一侧依次设有外圈永磁体35和外圈导磁环36,内定子31、内圈导磁环32、内圈永磁体33、外定子34、外圈永磁体35和外圈导磁环36之间留有气隙,内圈导磁环32设有容置孔37,内定子31外侧壁设有一体成型的限位块38,限位块38与容置孔37抵触,内定子31尾端同轴固定连接有线路板10,线路板10上设有三相霍尔传感器,线路板10沿其周向设有绝缘环,转子2、定子3和线路板10均置于外壳内;
32.外壳包括主壳体5、设置于主壳体5两端的第一端盖6和第二端盖7,主壳体5与外圈导磁环36相抵,主壳体5两端沿壳体边缘均设有若干内螺纹孔8,第一端盖6和第二端盖7靠近主壳体5一侧沿其边缘均设有若干通孔9,第一端盖6和第二端盖7均通过螺钉穿过通孔9与主壳体5螺纹连接,第二端盖7以圆心为中心开有轴孔11,电机轴1贯穿轴孔11;
33.一种机器人,包括控制中心、摄像装置、转速仪表盘及权利要求1-4任意一项所述的直流无刷电机,控制中心、摄像装置和直流无刷电机串联,转速仪表盘与控制中心通过电力线连接,控制中心与定子3之间耦接有逆变驱动电路,逆变驱动电路与定子3之间耦接有过零检测电路,三相霍尔传感器与控制中心耦接;
34.一种检测直流无刷电机转速的方法,根据权利要求5-6所述的机器人用于检测直流无刷电机转速的方法,包括如下步骤:
35.s1、检测直流无刷电机的过零信号及换相跳变信号;
36.s2、记录过零信号及换相跳变信号的产生时间;
37.s3、根据产生时间,测算直流无刷电机的转速。
38.具体实施过程如下:
39.将电机连接电源,转子2带动电机轴1高速稳定旋转,通过外圈永磁体35和内圈永磁体33产生恒定的永磁磁场,利用多相绕组4与永磁磁场相互作用产生力矩,驱动转子2高速旋转;本发明的永磁回路为:磁通从外圈永磁体35的n极出发,穿过气隙到达正对的内圈永磁体33的s极,再由内圈永磁体33的n极出发,经过内圈导磁环32到达相邻内圈永磁体33的s极,从相邻内圈永磁体33的n极流出,穿过气隙到达正对相邻外圈永磁体35的s极,再由相邻外圈永磁体35的n极流出,经过外圈导磁环36回到外圈永磁体35的s极,由此构成闭合磁回路,大幅减少传统单圈切向方向上的漏磁,增大气隙有效磁密方向的磁密,增大设计电机转矩,在相同转矩时能大幅减少功耗,使电机极间磁密更加均匀,减少转矩脉动。
40.电机转动时,驱动摄像装置移动进行图像拍摄,电机转动过程中,逆变驱动电路驱
动多相绕组4按序依次导通与关闭,由于电磁感应,转子2旋转时,多相绕组4中未导通的绕组产生感应反动势,当感应反动势电压大小等于中性点电压大小相等时,产生过零点信号,转子2旋转时,三相霍尔传感器检测转子2位置,并且在转子2换相时产生跳变信号,将跳变信号传递到控制中心,控制中心根据过零点信号及跳变信号计算出转子2的转速,计算出的转速通过转速仪表盘显示。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
42.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1