输电线路地线全自动直流融冰推拉式短接操控系统
1.本发明涉及输电线路运行维护领域,是一种输电线路地线全自动直流融冰推拉式短接操控系统。
背景技术:
2.近年来,极端天气频发,输电线路覆冰情况经常发生,给电网正常使用带来严重的影响,无法保证用户正常用电,严重时会发生倒塔现象,造成无法估量的经济损失。并且地线相比于导线高度更高,正常状态下无电流通过,因此地线更易覆冰。
3.国内对于直流融冰装置的研发均为悬臂式装置,在导地线触头接触时无法准确使触头连接,需要人工上塔辅助作业,安全风险较大,无法实现全自动融冰过程,在融冰时操作危险较大,若操作出现意外施工人员极易出现危险情况。且现有的输电线路直流融冰装置重量均较大,对融冰塔的强度要求较高,若出现较危险自然天气现象,直流融冰装置将会影响输电线路的正常使用运行,在未进行直流融冰过程的情况下,现有的直流融冰装置会对线路的正常运行造成一定的安全隐患。
4.目前出现的融冰隔离开关大多无法保证触头的紧密贴合,如:申请号:cn202111419137.7,公开了“一种架空地线融冰自动接线装置”,它将静触头直接安装在导线绝缘子的汇流集电器旁,动触头从横担垂直放下,工作距离长,并且无法保证动静触头贴合准确性与紧密性;又如:申请号:cn202022280787.5,公开了“一种地线融冰换线开关装置”,它采用动触头与导电杆从横担旋转下来与静触头贴合结构,存在着导电杆受风面积大,特别是在大风等极端天气,难以成功旋转至理想工作位置,影响融冰作业;还如:申请号:cn202010342420.3,公开了“一种输电导线直流融冰自动短接联控装置”,这种融冰装置需较大程度改变杆塔横担结构,需要在横担安装履带供装置在横担上运动;再如:申请号:cn202110596184.2,“220kv输电线路导线全自动直流融冰短接操控装置”,这种融冰装置工作过程过于复杂,动静触头贴合需要先旋转到横担正下方后进行提拉,且旋转过程易受影响。
技术实现要素:
5.本发明的目的是克服现有的技术缺点,提供一种结构简单,质量轻,操作简单,安全可靠的输电线路地线全自动直流融冰推拉式短接操控系统。
6.本发明的目的是通过以下技术方案来实现的:一种输电线路地线全自动直流融冰推拉式短接操控系统,包括:杆塔6,导线7,地线8,横担9,地线支架11和直流融冰车10/变电站12,其特征是,还包括导线触头分系统1、地线触头分系统2、引流分系统3、中心控制分系统4和地线覆冰监测分系统5,所述地线覆冰监测分系统5用于监测地线8覆冰异常情况,反馈到后端数据处理及监测平台508进行数据处理分析,通过引流分系统3和中心控制分系统4将导线触头分系统1从杆塔6垂直上提,地线触头分系统2向下推动与导线触头分系统1之间连接形成直流融冰回路,直流融冰回路的电流传入地线8而使地线8直流融冰,地线8融冰
后,导线触头分系统1的导线触头129和地线触头分系统2的地线触头209再分别向相反方向推拉,直至恢复到初始状态;所述导线触头分系统1与所述地线触头分系统2均悬挂在横担9上,所述引流分系统3分别与地线8、导线触头分系统1以及导线7和地线触头分系统2连接,所述中心控制分系统4置在横担9上,所述地线覆冰监测分系统5置在中心控制分系统4上,所述地线覆冰监测分系统5监测到地线8覆冰,进行数据采集后,反馈到后端数据处理及监测平台508进行数据分析并且计算融冰电流和时间,所述地面遥控器410同时控制第一电动推杆103和第二电动推杆104进行推或拉,且控制第三电动推杆204与第一电动推杆103和第二电动推杆104相反方向进行拉或推,使导线触头129与地线触头209相接触而构成直流融冰回路。
7.进一步地,所述导线触头分系统1的结构包括:第一绝缘子串101,第二绝缘子串102,第一电动推杆103,第二电动推杆104,第一焊接板105,第二焊接板106,第一太阳能电池板107,第二太阳能电池板108,第一推杆控制反应器109,第二推杆控制反应器110,第一法兰支撑杆111,第二法兰支撑杆112,第一u型环113,第二u型环114,第三u型环115,第四u型环116,第一球头挂环117,第二球头挂环118,第一绝缘子挂板119,第二绝缘子挂板120,第一连接杆121,第二连接杆122,第一t型板123,第二t型板124,第一下连接平台125,第二下连接平台126,上连接平台127,触头夹紧装置128,导线触头129,触臂130,铜板131和铜接线板132,所述第一电动推杆103和第二电动推杆104的上端均固连在上连接平台127,所述第一电动推杆103的下端通过第一法兰支撑杆111、第三u型环115、第一u型环113和第一球头挂环117与第一绝缘子串101相连;第二电动推杆104的下端通过第二法兰支撑杆112、第四u型环116、第二u型环114和第二球头挂环118与第二绝缘子串102相连;第一绝缘子串101的下端通过第一连接杆121与第一下连接平台125连接,第二绝缘子串102的下端通过第二连接杆122与第二下连接平台126连接,第一下连接平台125通过铜板131与第二下连接平台126连接,在所述第一法兰支撑杆111和第二法兰支撑杆112上置有导线触头129,在所述上连接平台127上分别置有第一电动推杆控制反应器109和第二电动推杆控制反应器110。
8.进一步地,在所述上连接平台127上分别设置为第一电动推杆103供电的第一太阳能电池板107,为第二电动推杆104供电的第二太阳能电池板108。
9.进一步地,所述地线触头分系统2的结构包括:第三太阳能电池板201,第三推杆控制中心202,第三焊接板203,第三电动推杆204,第三球头挂环205,第三绝缘子206,空心铝管207,球头挂环208,地线触头209和连接棒210,所述第三电动推杆204固连在上连接平台127,第三电动推杆204通过第三球头挂环205与第三绝缘子206连接,第三绝缘子206下端穿过连接棒210与空心铝管207连接,地线触头209通过球头挂环208连接在空心铝管207上。
10.进一步地,所述上连接平台127上设置为第三电动推杆204供电的第三太阳能电池板201。
11.进一步地,所述引流分系统3的结构包括:引流线夹301、地线线夹302、支柱绝缘子303、纯铜引流线304、导线引流线305、导线引流线夹306、引流线接线夹307、引流线308、引流线309、下支柱绝缘子310、侧支柱绝缘子311、地线连接线312和遥控开关313,所述引流线夹301夹持所述地线触头分系统2的空心铝管207,所述导线引流线夹306连接导线引流线305,导线引流线305通过导线引流线夹306和引流线接线夹307将导线7与铜接线板132相连,所述纯铜引流线304通过地线线夹302与地线8相连,所述支柱绝缘子303用于隔开纯铜
引流线304与杆塔6,所述引流线接线夹307安装在所述导线触头分系统1的铜接线板137上,所述下支柱绝缘子310用于将引流线308、引流线309与横担9隔开,所述侧支柱绝缘子311用于将地线连接线312与横担9隔开,遥控开关313用于控制回路中地线连接线312的断开或重合。
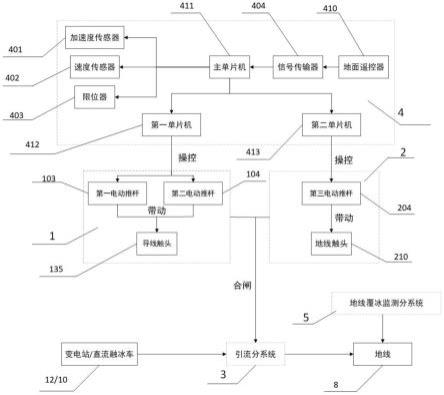
12.进一步地,所述中心控制分系统4的结构包括:速度传感器401、加速度传感器402、限位器403、信号传输器404、电源开关405、保护壳406、固定装置407、太阳能电池板408、蓄电池409、地面遥控器410、主单片机411、第一单片机412和第二单片机413,所述主单片机411置于保护壳406的内,获取速度传感器401、加速度传感器402、第一单片机412、第二单片机413的信息,通过信号传输器404与地面遥控器410相连;所述速度传感器401、加速度传感器402和限位器403用于控制地线触头209推拉的速度、加速度和位置;所述蓄电池409位于保护壳406的内,提供运行12v工作电源,同时在蓄电池409上端置有太阳能充电板408和电源开关405,所述地面遥控器410通过信号传输器404发射信号指令,所述保护壳406通过固定装置407固定在横担9的上方。
13.进一步地,所述地线覆冰监测分系统5的结构包括:前端微型摄像机501、拉力采集单元502、倾角采集单元503、温度湿度气压采集单元504、超声波风速风向传感器505、太阳能板506、通信发射装置507、后端数据处理及监测平台508和保护装置509,所述前端微型摄像机501固定在所述地线支架11上端,所述拉力采集单元502、倾角采集单元503、温度湿度气压采集单元504和超声波风速风向传感器505分别置在地线8的两端,所述太阳能板506和通信发射装置507安装在保护装置509上,实时对环境温度、湿度、风速、风向、雨量以及地线8的倾斜角、风偏角和覆冰地线8的重力变化、舞动频率信息的采集,所述前端微型摄像机501、拉力采集单元502、倾角采集单元503、温度湿度气压采集单元504、超声波风速风向传感器505采集的数据信号传递到后端数据处理及监测平台508进行数据分析,计算覆冰量、判定是否需要进行融冰以及确定融冰电流和时间。
14.本发明的一种输电线路地线全自动直流融冰推拉式短接操控系统是集电气自动化、机电一体化、单片机控制技术之结合,与现有直流融冰短接操控装置相比的技术效果体现在:1.所述系统一体化、自动化程度高,无需人工上塔进行重合闸等操作,通过远距离操控就能够实现输电线路地线全自动直流融冰作业,提升作业的安全性,且方便快捷;2.对现有架空输电线路已安装设备无影响;3.融冰时间及线路停电时间大幅缩减,有较好的经济效益;4.所述系统结构简单、性能可靠、且使用寿命长;5.电流来自直流融冰车或变电站,选择性多,适用于恶劣天气下,崎岖道路车辆无法正常通行;6.运动方式简单,从发出指令到导地线触头接触时间大大减少;7.通过电子控制装置的运行,其运行速度和精度远高于机械制动方法,且推拉式方法,动、静触头连接更紧密;8.导地线触头结合采取推拉式方法,提高了触头接触的准确性;9.在导线触头上置有触头夹紧装置,能够将导地线触头更加紧密连接;10.安装限位器、速度传感器、加速度传感器,触头的运动形式能够很好监测;
11.地线覆冰监测系统能够准确计算融冰电流及工作时间,提高工作效率,更具经济性。
附图说明
15.图1为一种输电线路地线全自动直流融冰推拉式短接操控系统原理框图;图2为导地线触头分系统未工作状态主视示意图;图3为图1的一种输电线路地线全自动直流融冰推拉式短接操控系统工作状态侧视示意图;图4为导地线触头分系统工作状态主视示意图;图5为图1的一种输电线路地线全自动直流融冰推拉式短接操控系统工作状态,呈45
°
视图;图6为中心控制分系统原理图;图7为地线覆冰监测分系统框图;图8为地线-导线回路示意图;图9为导线-地线-地线-导线回路示意图。
16.图中:导线触头分系统1,地线触头分系统2,引流分系统3,中心控制分系统4,地线覆冰监测分系统5,杆塔6,导线7,地线8,横担9,直流融冰车10,地线支架11,变电站12,第一绝缘子串101,第二绝缘子串102,第一电动推杆103,第二电动推杆104,第一焊接板105,第二焊接板106,第一太阳能电池板107,第二太阳能电池板108,第一推杆控制反应器109,第二推杆控制反应器110,第一法兰支撑杆111,第二法兰支撑杆112,第一u型环113,第二u型环114,第三u型环115,第四u型环116,第一球头挂环117,第二球头挂环118,第一绝缘子挂板119,第二绝缘子挂板120,第一连接杆121,第二连接杆122,第一t型板123,第二t型板124,第一下连接平台125,第二下连接平台126,上连接平台127,触头夹紧装置128,导线触头129,触臂130,铜板131,铜接线板132,第三太阳能电池板201,第三推杆控制中心202,第三焊接板203,第三电动推杆204,第三球头挂环205,第三绝缘子206,空心铝管207,球头挂环208,地线触头209,连接棒210,引流线夹301,地线线夹302,支柱绝缘子303,纯铜引流线304,导线引流线305,导线引流线夹306,引流线接线夹307,引流线308,引流线309,下支柱绝缘子310,侧支柱绝缘子311,地线连接线312,遥控开关313,速度传感器401,加速度传感器402,限位器403,信号传输器404,电源开关405,保护壳406,固定装置407,太阳能电池板408,蓄电池409,地面遥控器410,主单片机411,第一单片机412,第二单片机413,前端微型摄像机501,拉力采集单元502,倾角采集单元503,温度湿度气压采集单元504,超声波风速风向传感器505,太阳能板506,通信发射装置507,后端数据处理及监测平台508,保护装置509。
具体实施方式
17.下面利用附图和实施例对本发明的一种输电线路地线全自动直流融冰推拉式短接操控系统进行详细说明。
18.参照图1-图9,本发明的一种输电线路地线全自动直流融冰推拉式短接操控系统,包括:杆塔6,导线7,地线8,横担9,地线支架11和直流融冰车10/或变电站12,还包括导线触
头分系统1、地线触头分系统2、引流分系统3、中心控制分系统4和地线覆冰监测分系统5,所述地线覆冰监测分系统5用于监测到地线8覆冰异常情况,反馈到后端数据处理及监测平台508进行数据处理分析,通过引流分系统3和中心控制分系统4将导线触头分系统1从杆塔6垂直上提,地线触头分系统2向下推动与导线触头分系统1之间连接形成直流融冰回路,直流融冰回路的电流传入地线8而使地线8直流融冰,地线8融冰后,导线触头分系统1的导线触头129和地线触头分系统2的地线触头209再分别向相反方向推拉,直至恢复到初始状态;所述导线触头分系统1与所述地线触头分系统2均悬挂在横担9上,所述引流分系统3分别与地线8、导线触头分系统1以及导线7和地线触头分系统2连接,所述中心控制分系统4置在横担9上,所述地线覆冰监测分系统5置在中心控制分系统4上,所述地线覆冰监测分系统5监测到地线8覆冰,进行数据采集后,反馈到后端数据处理及监测平台508进行数据分析并且计算融冰电流和时间,所述地面遥控器410同时控制第一电动推杆103和第二电动推杆104进行推或拉,且控制第三电动推杆204与第一电动推杆103和第二电动推杆104相反方向进行拉或推,使导线触头129与地线触头209相接触而构成直流融冰回路。
19.参照图1、图2和图4,所述导线触头分系统1的结构包括:第一绝缘子串101,第二绝缘子串102,第一电动推杆103,第二电动推杆104,第一焊接板105,第二焊接板106,第一太阳能电池板107,第二太阳能电池板108,第一推杆控制反应器109,第二推杆控制反应器110,第一法兰支撑杆111,第二法兰支撑杆112,第一u型环113,第二u型环114,第三u型环115,第四u型环116,第一球头挂环117,第二球头挂环118,第一绝缘子挂板119,第二绝缘子挂板120,第一连接杆121,第二连接杆122,第一t型板123,第二t型板124,第一下连接平台125,第二下连接平台126,上连接平台127,触头夹紧装置128,导线触头129,触臂130,铜板131和铜接线板132,所述第一电动推杆103和第二电动推杆104的上端均固连在上连接平台127,所述第一电动推杆103的下端通过第一法兰支撑杆111、第三u型环115、第一u型环113和第一球头挂环117与第一绝缘子串101相连;第二电动推杆104的下端通过第二法兰支撑杆112、第四u型环116、第二u型环114和第二球头挂环118与第二绝缘子串102相连;第一绝缘子串101的下端通过第一连接杆121与第一下连接平台125连接,第二绝缘子串102的下端通过第二连接杆122与第二下连接平台126连接,第一下连接平台125通过铜板131与第二下连接平台126连接,在所述第一法兰支撑杆111和第二法兰支撑杆112上置有导线触头129,在所述上连接平台127上分别置有第一电动推杆控制反应器109和第二电动推杆控制反应器110。在所述上连接平台127上分别设置为第一电动推杆103供电的第一太阳能电池板107,为第二电动推杆104供电的第二太阳能电池板108。
20.参照图1、图2和图4,所述地线触头分系统2的结构包括:第三太阳能电池板201,第三推杆控制中心202,第三焊接板203,第三电动推杆204,第三球头挂环205,第三绝缘子206,空心铝管207,球头挂环208,地线触头209和连接棒210,所述第三电动推杆204固连在上连接平台127,第三电动推杆204通过第三球头挂环205与第三绝缘子206连接,第三绝缘子206下端穿过连接棒210与空心铝管207连接,地线触头209通过球头挂环208连接在空心铝管207上。所述上连接平台127上设置为第三电动推杆204供电的第三太阳能电池板201。
21.参照图1、图3和图5,所述引流分系统3的结构包括:引流线夹301、地线线夹302、支柱绝缘子303、纯铜引流线304、导线引流线305、导线引流线夹306、引流线接线夹307、引流线308、引流线309、下支柱绝缘子310、侧支柱绝缘子311、地线连接线312和遥控开关313,所
述引流线夹301夹持所述地线触头分系统2的空心铝管207,所述导线引流线夹306连接导线引流线305,导线引流线305通过导线引流线夹306和引流线接线夹307将导线7与地线触头分系统2的铜接线板132相连,所述纯铜引流线304通过地线线夹302与地线8相连,所述支柱绝缘子303用于隔开纯铜引流线304与杆塔6,所述引流线接线夹307安装在所述导线触头分系统1的铜接线板132上,所述下支柱绝缘子310用于将引流线308、引流线309与横担9隔开,所述侧支柱绝缘子311用于将地线连接线312与横担9隔开,遥控开关313用于控制回路中地线连接线312的断开或重合。
22.参照图1、图2和图6,所述中心控制分系统4的结构包括:速度传感器401、加速度传感器402、限位器403、信号传输器404、电源开关405、保护壳406、固定装置407、太阳能电池板408、蓄电池409、地面遥控器410、主单片机411、第一单片机412和第二单片机413,所述主单片机411置于保护壳406的内,获取速度传感器401、加速度传感器402、第一单片机412、第二单片机413的信息,通过信号传输器404与地面遥控器410相连;所述速度传感器401、加速度传感器402和限位器403用于控制地线触头210推拉的速度、加速度和位置;所述蓄电池409位于保护壳406的内,提供运行12v工作电源,同时在蓄电池409上端置有太阳能充电板408和电源开关405,所述地面遥控器410通过信号传输器404发射信号指令,所述保护壳406通过固定装置407固定在横担9的上方。
23.参照图1、图7和图8,所述地线覆冰监测分系统5的结构包括:前端微型摄像机501、拉力采集单元502、倾角采集单元503、温度湿度气压采集单元504、超声波风速风向传感器505、太阳能板506、通信发射装置507、后端数据处理及监测平台508和保护装置509,所述前端微型摄像机501固定在所述地线支架11上端,所述拉力采集单元502、倾角采集单元503、温度湿度气压采集单元504和超声波风速风向传感器505分别置在地线8的两端,所述太阳能板506和通信发射装置507安装在保护装置509上,实时对环境温度、湿度、风速、风向、雨量以及地线8的倾斜角、风偏角和覆冰地线8的重力变化、舞动频率信息的采集,所述前端微型摄像机501、拉力采集单元502、倾角采集单元503、温度湿度气压采集单元504、超声波风速风向传感器505采集的数据信号传递到后端数据处理及监测平台508进行数据分析,计算覆冰量、判定是否需要进行融冰以及确定融冰电流和时间。
24.参照图8地线-导线回路示意图。融冰电流来自直流融冰车10。工作时,导线触头129和地线触头209良好接触,遥控开关313断开,融冰电流从杆塔6下方的直流融冰车10经过引流系统3进入地线8,到达下一基杆塔6后,顺着地线触头分系统2、导线触头分系统1流入导线7,最终经引流分系统3流回直流融冰车10。
25.参照图9地线-地线回路示意图。融冰电流来自变电站12。工作时,导线触头129和地线触头209良好接触,遥控开关313重合,融冰电流从变电站12经导线7、导线触头分系统1、地线触头分系统2和引流分系统3传至所需融冰地线8,经地线连接线至另一侧地线8后,按照同样的方法流至导线7,最终流回变电站12。
26.本发明的一种输电线路地线全自动直流融冰推拉式短接操控系统的工作过程为:未工作状态下导线触头分系统1与地线触头分系统2保持安全的绝缘距离,导线触头分系统1与地线触头分系统2悬挂在横担9上,引流分系统3将地线8和导线触头分系统1以及导线7和地线触头分系统2分别连接,中心控制分系统4安装在横担9上,地线覆冰监测分系统5安装在中心控制分系统4。地线覆冰监测分系统5监测到地线8覆冰,进行数据采集后,
反馈到后端数据处理及监测平台508进行数据分析并且计算融冰电流和时间,地面遥控器410操纵导线触头129和地线触头209的第一电动推杆103、第二电动推杆104、第三电动推杆204分别进行推与拉,导线触头129和地线触头209良好接触,使其构成回路(融冰电流回路共有两种方案)。方案1:地线-导线回路(融冰电流来自直流融冰车10)。此时遥控开关断开,地线触头209和导线触头129形成回路,融冰电流从直流融冰车10经引流线310进入地线8,与导线构成回路后,从引流线309流回直流融冰车10。方案2:地线-地线回路(融冰电流来自变电站12)。此时融冰线路的下一基杆塔的遥控开关重合,融冰电流从变电站12经导线传至所需融冰线路,经地线触头分系统1,导线触头分系统2,引流分系统3引入地线后,电流传至下一基杆塔,经地线连接线至另一侧地线,另一侧地线通过同样的路径传回至变电站12。融冰结束后,地面遥控410操纵第一电动推杆103、第二电动推杆104、第三电动推杆204向反向运动,直至恢复到原来的状态。
27.本发明具体实施方式的一种输电线路地线全自动直流融冰推拉式短接操控系统的机械零(部)件及电器、电子元件均为市售产品,容易实施,具体尺寸和型号如下:第一绝缘子串、第二绝缘子串:fxbw4-110/160复合绝缘子串;第一电动推杆,第二电动推杆,第三电动推杆:yixing直流电动推杆电机, 行程1000mm,速度90mm/min,扭矩100n.m;第一太阳能电池板、第二太阳能电池板和第三太阳能电池板:6v100ma 120*38mm多晶硅太阳能电池板;第一球头挂环和第二球头挂环:qp-16s球头挂环;第一碗头挂板和第二碗头挂板:ws-16105s碗头挂板第一t型板和第二t型板:钢制,上端板尺寸为120mm*100mm*16mm,下端板尺寸为100mm*200mm*10mm;第一下平台连接板和第二下平台连接板:钢制,尺寸为1000mm*500mm*8mm;铜接线板: 400mm*200mm*15mm的纯铜板;触臂:vs1-3150a紫铜镀银触臂;梅花触头:gc5-3150a(64片)紫铜镀银梅花触头;圆柱静触头:pt车手3150a紫铜镀银静触头;空心铝管:内径50mm,壁厚10mm,长为1m的空心铝管;第一支柱绝缘子串:fzsw4-35/6复合支柱绝缘子;第二支柱绝缘子串:zsw-220/16k-3复合支柱绝缘子;支柱绝缘子串下端连接板:钢制,板尺寸为300mm*600mm*10mm,在钢板下端焊接外径为40 mm,内径为30 mm,长为400mm的空心圆杆;纯铜引流线:截面积为100mm*8mm的铜编织线;加速度传感器:sca3060加速度传感器;速度传感器:rhein tacho sm速度传感器;限位器:lbt20-dxz5/4限位开关;主单片机:yibeiic单片机;第一单片机、第二单片机:xy150单片机;拉力采集单元:hychuangans型拉力传感器;
倾角采集单元:维特智能sindt01双轴倾角传感器;温度、湿度、气压采集单元:bosch温度、湿度、气压传感器;信号传输器:g2000信号传输器;蓄电池:24v 800mah蓄电池;太阳能充电板:单晶100w太阳能12v光伏发电板;保护壳:铝合金制,尺寸为400mm*200mm*100mm方形外壳;固定装置:钢制,尺寸为l250*90*9*13型钢,型钢两翼有10mm直径的孔洞。
28.本发明的特定实施例已对本发明的内容作出了详尽的说明,但不局限本实施例,本领域技术人员根据本发明的启示所做的任何显而易见的改动,都属于本发明权利保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1