一种半集中式开绕组多电机驱动系统的控制方法
1.本发明属于电机控制领域,具体涉及一种半集中式开绕组多电机驱动系统的控制方法。
背景技术:
2.在电源供电电压不变的情况下,为提高电机运行的极限速度,通常的做法是将电机的端部绕组打开,两端分别接一个逆变器,形成开绕组拓扑供电,使得加在电机两端的最大电压得到提升。然而,开关器件数量的增加会带来两个问题,一是驱动器硬件成本增加,二是驱动器的故障概率增加。
3.目前为了解决减少开关器件数量,提出了多种控制拓扑:三桥臂双电机拓扑、五桥臂双电机拓扑、半集中式开绕组双电机拓扑等。三桥臂双电机拓扑等能够减少的开关器件数量最多,但是对双电机的运行条件的要求比较苛刻,需要两台电机的运行状况相近。五桥臂双电机拓扑通过两台电机共用一个桥臂的形式,减少开关器件的使用,这种拓扑能够适应两台电机不同的运行状况。半集中式开绕组双电机拓扑在两台电机的一侧使用两个逆变器供电,另一侧共用一个逆变器供电,该控制拓扑相对于五桥臂双电机拓扑能够进一步减少电机的开关管数量,同样能够适应不同的电机的运行状况,缺点是仅适用于两台电机系统,对于多台电机投入运行的状况,该系统的驱动控制算法难以适用。
技术实现要素:
4.针对现有技术的不足,本发明的目的在于提供一种半集中式开绕组多电机驱动系统的控制方法,以解决上述背景技术中提出的问题。
5.本发明的目的可以通过以下技术方案实现:
6.一种半集中式开绕组多电机驱动系统的控制方法,所述控制方法如下:
7.先由硬件电路测量得到系统的电流以及直流母线电压,由位置传感器测量得到每台电机的角度,并计算系统速度,并由速度环计算出电机驱动系统的推力;然后结合每台电机的额定电流、磁链与推力分配推力给每台电机,并转换成q轴电流的形式,并由电流环计算出每台电机所需的dq轴电压,经过坐标变换将电压需求变换到abc坐标系;接着将每台电机的电压调制成占空比指令,判断电机是否处于过调制运行区域,对于过调制区域电压进行过调制处理;最后分配电机的占空比指令至独立逆变器和共用逆变器。
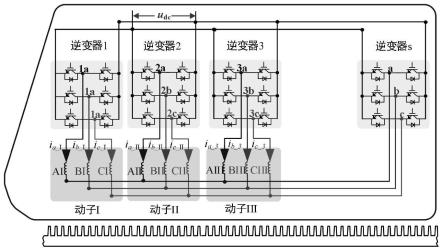
8.优选地,所述驱动系统由n台电机组成,n》0,每台动子绕组的一侧分别连接一台独立逆变器,所有动子绕组的另一侧共同连接一台共用逆变器,所有动子之间刚性连接。
9.优选地,所述驱动系统中根据推力需求给电机分配q轴电流指令
[0010][0011]
优选地,所述dq轴电压采用pi调节器计算:
[0012][0013]
然后采用比例谐振调节器计算零序电压,离散化的形式表示如下:
[0014]
uk=k
p_pi
*ek+b0*ek+b2*e
k-2-a1u
k-1-a2u
k-2
[0015][0016]
优选地,将每台电机的所述dq轴参考电压转换到abc坐标系下:
[0017][0018]
优选地,所述电压调制过程如下:
[0019]
先计算每台电机每相的电压调制系数:
[0020][0021]
然后计算电压调制系数的极限值:
[0022][0023]
优选地,所述判断电机是否处于过调制运行区域如下:
[0024]
k=max{m
a_max-m
a_min
,m
b_max-m
b_min
,m
c_max-m
c_min
}
[0025]
当k》1时,电机处于过调制区域;否则,电机处于线性调制区域。优选地,所述过调制区域处理如下:
[0026]
先计算修正电压调制系数的极限值:
[0027][0028]
然后计算电压调制系数修正极限系数
[0029][0030]
计算每一相的电压调制系数的相修正系数k
y_x
:
[0031][0032]
计算电压调制系数的电机的修正系数k
x
:
[0033]kx
=min{k
a_x
,k
b_x
,k
c_x
}
[0034]
利用修正值和电压调制系数计算电压调制系数修正值
[0035][0036]
优选地,所述占空比指令分配过程如下:
[0037]
先计算共用桥臂的极限占空比(δ
y_s_max
,δ
y_s_max
):
[0038][0039]
然后利用极限占空比计算共用桥臂的最优占空比δ
y_s
:
[0040][0041]
最后结合共用桥臂的最优占空比和电压调制系数,计算独立桥臂的占空比:
[0042][0043]
本发明的有益效果:
[0044]
1、本发明控制方法将半集中式开绕组系统从双电机拓展到多电机系统中,并提高系统的直流母线电压利用率,能够减少驱动系统中开关器件的数量,从而降低电机的硬件成本,降低了开绕组驱动系统的故障概率,提高了系统的安全性和可靠性。
附图说明
[0045]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0046]
图1是本发明中半集中式开绕组驱动系统多电机拓扑图;
[0047]
图2是本发明中稳态运行时的驱动系统的速度图;
[0048]
图3是本发明中稳态运行时电机i的三相电流图;
[0049]
图4是本发明中稳态运行时电机i的q轴电流图;
[0050]
图5是本发明中稳态运行时a相的占空比。
具体实施方式
[0051]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0052]
请参阅图1至图5所示,本发明提出一种半集中式开绕组多电机驱动系统的控制方法,为了验证本发明的效果,选取永磁直线电机,该直线电机的参数均为:定子相电阻3ω,定子相电感ld=lq=ls=33.5mh,永磁体磁链为0.125wb,对三台驱动电机稳态运行时情况进行实验验证。
[0053]
该驱动系统由n台电机组成,n》0,每台动子绕组的一侧分别连接一台独立逆变器,所有动子绕组的另一侧共同连接一台共用逆变器,所有动子之间刚性连接。
[0054]
控制方法包括如下步骤:
[0055]
(1)半集中式开绕组多电机驱动系统中,推力电流的分配模式如下所示:
[0056]
根据推力需求给电机分配q轴电流指令
[0057][0058]
式中,ψ
f1
为电机的永磁磁链,τs为直线电机同极性极距,n为电机数量。
[0059]
(2)计算每台电机所需的dq0轴电压:
[0060]
计算dq轴电压采用pi调节器:
[0061][0062]
式中,i
d_x
,i
q_x
,分别为电机x的实际dq轴电流和参考dq轴电流,为电机x的电压需求,k
p_d_v
,k
i_d_v
,k
p_q_v
,k
i_q_v
分别为电机x的dq轴电流调节器的比例系数和积分系数,x为电机x,取i,ii,
…
,n。
[0063]
计算零序电压采用比例谐振调节器,离散化的形式表示如下:
[0064]
uk=k
p_pi
*ek+b0*ek+b2*e
k-2-a1u
k-1-a2u
k-2
[0065][0066]
式中,uk为在k时刻pr调节器计算的零序电压参考值ek为k时刻0与零序电流的差值;下标k,k-1,k-2表示第k时刻,k-1时刻,k-2时刻的值;ts为实时处理器的计算周期;ωc为比例谐振频率;ω0为电机的电角频率;k
p_pi
,ks为电机的比例谐振系数。
[0067]
(3)将每台电机的dq轴参考电压转换到abc坐标系下:
[0068][0069]
(4)计算每台电机每相的电压调制系数:
[0070][0071]
式中,为电机x的相电压,下标y表示y相,取a,b,c。u
dc
为电机的直流电压。m
y_x
为电机x的y相电压调制系数。
[0072]
计算电压调制系数的极限值:
[0073][0074]
式中,m
y_max
为y相的最大电压调制系数,m
y_min
为y相的最小电压调制系数。
[0075]
判断电机的运行区域:
[0076]
k=max{m
a_max-m
a_min
,m
b_max-m
b_min
,m
c_max-m
c_min
}
[0077]
如果k》1,电机处于过调制区域;否则,电机处于线性调制区域。
[0078]
(5)过调制区域处理
[0079]
计算修正电压调制系数的极限值:
[0080][0081]
其中,为改进的y相的最大电压调制系数,为改进的y相的最小电压调制系数;
[0082]
计算电压调制系数修正极限系数
[0083][0084]
计算每一相的电压调制系数的相修正系数k
y_x
:
[0085][0086]
计算电压调制系数的电机的修正系数k
x
:
[0087]kx
=min{k
a_x
,k
b_x
,k
c_x
}
[0088]
利用修正值和电压调制系数计算电压调制系数修正值
[0089][0090]
(6)计算共用桥臂的极限占空比(δ
y_s_max
,δ
y_s_max
):
[0091][0092]
利用极限占空比计算共用桥臂的最优占空比δ
y_s
:
[0093][0094]
结合共用桥臂的最优占空比和电压调制系数,计算独立桥臂的占空比:
[0095][0096]
图2为稳态运行时的驱动系统的速度图,可以看出本发明对速度的控制较为准确稳定。图3为稳态运行时电机i的三相电流图,本发明能够对于多电机系统的控制较为稳定,性能较好。图4为稳态运行时电机i的q轴电流图,本发明能够实现对转矩指令的跟随。图5为稳态运行时a相的占空比,可以看出a相的各个逆变器的占空比分配模式基本与所提出的策略相吻合。
[0097]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0098]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1