一种用于孤岛微电网中电池储能的数据驱动控制系统
1.本发明属于微电网领域,涉及一种用于孤岛微电网中电池储能的数据驱动控制系统。
背景技术:
2.孤岛型微电网由于发电容量低、同步惯性小,容易发生电压和频率不稳定。安装过剩发电能力,增加旋转备用可以减少电压和频率的不稳定性。然而,这增加了成本,降低了矿物燃料发电机的效率,增加了燃料消耗和温室气体排放。另外,电池储能系统能够通过提供电力储备来帮助维护微电网的稳定性。电池储能系统通过一个电力电子控制器与微电网连接,使他们能够参与微电网的电压和频率控制,或者改进的二级控制系统,它提供了更快的电压和频率恢复。然而,微电网的稳定性更依赖于一级控制系统。因此,为了提高孤岛微网的稳定性,需要改进控制系统。
3.并网逆变器是一种替代方案,它使用基于功率的同步,而不是锁相环。并网逆变器可以比并网逆变器更精确地复制电机的惯性行为。在大多数情况下,并网逆变器的控制系统设计用于复制同步电机的行为,尽管有些还复制了感应电机。基于机器的控制系统有几个优点:电力工程师可以直观地理解它们,它们可以对频率变化提供即时的有功功率响应,并且它们有时能够独立运行。
4.另外一种更严格的设计并网逆变器分散主控系统的方法。其中,微电网的分析动态相量模型用于调整电池储能系统的主控制器以及发电机的主控制器。这种系统范围内的方法提供了一些优势,因为它允许对电池储能系统控制系统和发电机控制系统进行联合优化。此外,与基于机器的控制系统相比,性能和稳定性得到了保证。
5.在远离基于动态模型的控制器设计的过程中,数据驱动的控制设计方法已应用于电力电子和电力系统领域。能够使用数据驱动方法对电磁铁电源的控制系统进行调谐。还存在一种用于直流微电网的数据驱动自适应电压控制系统。这些数据驱动控制方法减少了理论和实际性能之间的差异,降低了建模要求,降低了控制结构的复杂性,同时提供了有保证的性能和稳定性。
6.并网逆变器的解决方案中,栅极形成逆变器与更典型的并网逆变器相比,需要对逆变器控制系统进行广泛的修改。这可能会大大增加成本,而这并不能激励制造商投资商业化。此外,调整并网逆变器仿真机器参数的方法是启发式的,或使用简化的动态电力系统模型,这需要简化电力系统的行为,并完全忽略电压动态。这可能导致振荡响应和实践中的性能差,并且不能保证小信号稳定性和性能。
7.还有集中控制方案,其中集中式主控系统,它表现出良好的性能。然而,仅给出了仿真结果,并且由于通信延迟和可靠性的原因,在实践中对集中式主控制系统的实际实现和可靠性存在担忧。或者,更广泛地讨论使用下垂控制的分散主控制系统,包括惯性阻尼方法和并网逆变器。惯性阻尼方法使用频率变化率测量和惯性增益来增加频率降控制器。然而,在实践中,频率变化率测量需要时间常数约为1秒的强滤波,以避免与变流器控制回路
和变流器/电网接口的不稳定交互,这会严重降低低惯性系统的性能。此外,惯性阻尼方法只考虑有功功率控制回路。这可能导致与无功功率控制器和不稳定性的不良相互作用,并可能对小信号稳定性产生负面影响。
技术实现要素:
8.为了克服已有技术的不足,本发明提供了一种用于孤岛微电网中电池储能的数据驱动控制系统,数据驱动的孤岛微电网支持(ddgs)和数据驱动方法用于调整参数,采用数据驱动方法调节电压和频率控制器,可以在不改变现有的电源内控回路的情况下实现或改造;该控制系统允许控制增益的频率依赖性,使得下垂控制有了显著的改进,下垂控制只使用固定的控制增益,在所有频率上应用于错误信号。
9.本发明解决其技术问题所采用的技术方案是:
10.一种用于孤岛微电网中电池储能的数据驱动控制系统,其特征在于,数据驱动的孤岛微电网支持ddgs控制系统中,x
i,
…j=0,1,
…
,p是分子参数,y
i,
…j=0,1,
…
,q-1是分母参数,ddgs控制系统具有2(p+q-1)参数,为了调整ddgs控制器,使用了基于计算优化的方法,调谐直接在离散时域中进行;
11.首先,识别电力系统的频率响应数据frd,frd使用从实时电力系统模拟器获取的时域输入输出数据,数据收集在控制器设计用于的同一系统上;
12.使用注入的伪随机二进制序列prbs来激励微电网,prbs是一个重复的离散二进制序列,即仅采用两个值,其功率谱密度psd接近白噪声的功率谱密度;由于prbs包含多个频率分量,通过注入prbs并测量系统的输出,prbs是使用长度为n的线性反馈移位寄存器生成的,根据下式定义最大序列长度l l=2
n-1;
13.在将prbs应用于系统之前,将其设为双极性,振幅为a,识别采样周期t
s,id
确定最大激励频率,而
±
a的激励振幅定义应用控制输入的幅度;
14.为了进行识别,bess、p
grid,ref
和q
grid,ref
的控制输入通过prbs依次激励,同时记录测量输出ω
t
和v
t,rms
的响应;此过程重复两次,使用不同的t
s,id
值,以提高低频范围内频率响应的分辨率;结果数据用于调整ddgs控制器,数据采样时间步长为t
s,sample
=t
s,id
,取m个prbs周期,然后计算每个数据集的样本数,即记录长度n
rec
=m(2
n-1);
15.对使用prbs信号注入收集的时域识别数据集进行处理,以找到系统的a 2
×
2多输入多输出mimo频率响应数据系统,频率响应数据系统将ess的控制输入u与逆变器y测量的系统输出相关联,频率响应包括srf功率控制器、测量传感器和微电网系统的行为;
16.为了找到mimo频率响应数据和g,使用频谱分析方法对收集的数据集进行处理,传递函数如下所示:
[0017][0018]
其中,r
uu
是输入prbs的自相关,r
uy
是输入prbs和测量系统输出的互相关,dft是离散傅里叶变换算子,是mimo频率响应数据g的对应元素;这导致两组mimo频率响应数据,集合1和集合2,每一组具有l/2频点,集合1和集合2的频率点的线性间隔分别为2/(lt
s,id,1
)hz和2/(lt
s,id,2
)hz;
[0019]
最后,构造一组分辨率更高的频率响应数据,数组1覆盖更宽的频谱,尽管频率分辨率低于数组2;因此,从数组2中提取的点被截断以仅覆盖0-1hz的范围并附加数组1以增加频率响应数据在低频时的分辨率,由此,构建了系统g的完整频率响应数据集;
[0020]
在ddgs设计过程中使用的初始稳定控制器是在c小节中描述的常规idgs控制器,即:
[0021][0022]
带有ddgs控制器的闭环系统中,和分别是k
dd1
(z)和k
dd2
(z)的频率响应,r是参考值的向量,矢量d表示微电网上的负载变化对系统电压和频率造成的干扰,ddgs控制器k根据以下条件对频率和电压误差进行控制:
[0023][0024]
该控制系统控制目标是抑制对系统频率和电压的干扰,因此,优化目标是最小化加权系统灵敏度的h∞范数,即:
[0025][0026]
x是分子参数xi,y是k
dd1
(z)和k
dd2
(z)的分母参数yi,s是灵敏度函数:s=(i+gk)-1
;
[0027]
对控制器的直流增益进行约束,以实现稳态有功和无功功率共享,即
[0028]
对于k=1,2重复此约束,其中下标k表示控制器输入向量e的元素,即e
ω
和ev;x
i,k
,i=0,1,
…
,p是分子参数,y
j,k
,j=0,1,
…
,q-1是ddgs控制器的分母参数,k
init,k
是初始idgs控制器的增益;
[0029]
最后,为了使用mimo frd解决优化问题,优化问题围绕它进行了凸化,针对一组频率点ω求解优化问题,然后检查目标是否收敛。
[0030]
与传统的电网支持逆变器相比,该系统不需要改变逆变器内部的实际功率和无功功率控制回路,调整数据驱动控制器不需要微电网的动态模型,相反,识别微电网的频率响应,并直接对控制器进行优化调谐∞性能和鲁棒性标准,此外,在许多情况下,不可能对整个微电网主控制系统进行联合优化,因此,采用一种只用于电池储能系统的控制方法是更有利的。
[0031]
本发明的有益效果主要表现在:数据驱动的孤岛微电网支持(ddgs)和数据驱动方法用于调整参数,采用数据驱动方法调节电压和频率控制器,可以在不改变现有的电源内控回路的情况下实现或改造;该控制系统允许控制增益的频率依赖性,使得下垂控制有了显著的改进,下垂控制只使用固定的控制增益,在所有频率上应用于错误信号。
附图说明
[0032]
图1是数据驱动的孤岛微电网支持控制系统的原理框图。
[0033]
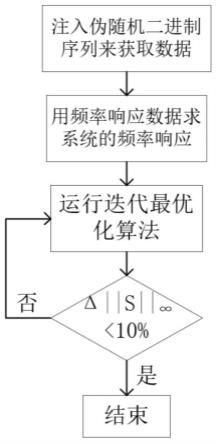
图2是数据驱动的孤岛微电网支持控制系统设计过程图。
[0034]
图3是带有ddgs控制器的闭环系统框图。
具体实施方式
[0035]
下面结合附图对本发明作进一步描述。
[0036]
参照图1~图3,一种用于孤岛微电网中电池储能的数据驱动控制系统,数据驱动的孤岛微电网支持ddgs控制系统如图1所示,x
i,
…j=0,1,
…
,p是分子参数,y
i,
…j=0,1,
…
,q-1是分母参数,与具有两个参数的idgs控制系统相比,ddgs控制系统具有2(p+q-1)参数,整数p和q由设计者明确定义,允许在适当的情况下选择小订单,与下垂控制器相比,固定结构控制器的更高阶导致锂电池储能系统在调谐良好时对频率和电压瞬变的响应得到改善,为了调整ddgs控制器,使用了基于计算优化的方法,此外,调谐直接在离散时域中进行。因此,不会引入由于控制器离散化引起的错误。
[0037]
首先,识别电力系统的频率响应数据frd,frd使用从实时电力系统模拟器获取的时域输入输出数据,数据收集在控制器设计用于的同一系统上,如果真正的微电网系统可用,则应将其用于数据采集和控制器实现,因此,用于调整控制器参数的frd中不会出现不准确的情况,这是ddgs控制系统的优点之一;
[0038]
为了收集数据,使用注入的伪随机二进制序列prbs来激励微电网,prbs是一个重复的离散二进制序列,即仅采用两个值,其功率谱密度psd接近白噪声的功率谱密度;由于prbs包含多个频率分量,通过注入prbs并测量系统的输出,prbs是使用长度为n的线性反馈移位寄存器生成的,根据下式定义最大序列长度l l=2
n-1;
[0039]
在将prbs应用于系统之前,将其设为双极性,振幅为a,识别采样周期t
s,id
确定最大激励频率,而
±
a的激励振幅定义应用控制输入的幅度;
[0040]
为了进行识别,bess、p
grid,ref
和q
grid,ref
的控制输入通过prbs依次激励,同时记录测量输出ω
t
和v
t,rms
的响应;此过程重复两次,使用不同的t
s,id
值,以提高低频范围内频率响应的分辨率;结果数据用于调整ddgs控制器,数据采样时间步长为t
s,sample
=t
s,id
,为了提高噪声抑制,取m个prbs周期,然后计算每个数据集的样本数,即记录长度n
rec
=m(2
n-1);
[0041]
对使用prbs信号注入收集的时域识别数据集进行处理,以找到系统的a 2
×
2多输入多输出mimo频率响应数据系统,频率响应数据系统将ess的控制输入u与逆变器y测量的系统输出相关联,频率响应包括srf功率控制器、测量传感器和微电网系统的行为。
[0042]
为了找到mimo频率响应数据和g,使用频谱分析方法对收集的数据集进行处理,传递函数如下所示
[0043][0044]
其中,r
uu
是输入prbs的自相关,r
uy
是输入prbs和测量系统输出的互相关,dft是离散傅里叶变换算子,是mimo频率响应数据g的对应元素;这导致两组mimo频率响应数据,集合1和集合2,每一组具有l/2频点,集合1和集合2的频率点的线性间隔分别为2/(lt
s,id,1
)hz和2/(lt
s,id,2
)hz;
[0045]
最后,构造一组分辨率更高的频率响应数据,数组1覆盖更宽的频谱,尽管频率分
辨率低于数组2;因此,从数组2中提取的点被截断以仅覆盖0-1hz的范围并附加数组1以增加频率响应数据在低频时的分辨率,由此,构建了系统g的完整频率响应数据集;
[0046]
图2给出了数据驱动的孤岛微电网支持控制系统设计过程,在ddgs设计过程中使用的初始稳定控制器是在c小节中描述的常规idgs控制器,即:
[0047][0048]
带有ddgs控制器的闭环系统框图如图3所示,其中和分别是k
dd1
(z)和k
dd2
(z)的频率响应,r是参考值的向量,矢量d表示微电网上的负载变化对系统电压和频率造成的干扰,ddgs控制器k根据以下条件对频率和电压误差进行控制:
[0049][0050]
该控制系统的主要控制目标是抑制对系统频率和电压的干扰,因此,优化目标是最小化加权系统灵敏度的h∞范数,即:
[0051][0052]
x是分子参数xi,y是k
dd1
(z)和k
dd2
(z)的分母参数yi,s是灵敏度函数;
[0053]
s=(i+gk)-1
[0054]
对控制器的直流增益进行约束,以实现稳态有功和无功功率共享,即
[0055][0056]
对于k=1,2重复此约束,其中下标k表示控制器输入向量e的元素,即e
ω
和ev;x
i,k
,i=0,1,
…
,p是分子参数,y
j,k
,j=0,1,
…
,q-1是ddgs控制器的分母参数,k
init,k
是初始idgs控制器的增益;
[0057]
最后,为了使用mimo frd解决优化问题,优化问题围绕它进行了凸化,针对一组频率点ω求解优化问题,然后检查目标是否收敛,至此,控制器设计完成。
[0058]
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1