电机控制方法、装置、存储介质及电机控制器与流程
本公开涉及电机,具体地,涉及一种电机控制方法、装置、存储介质及电机控制器。
背景技术:
1、新能源汽车的电机控制功能依赖转子的角度信息。目前,角度解算方案常用的是:通过专用的硬件解码芯片结合外围整形放大电路发出固定幅值和频率的高频正弦激励信号,并将该高频正弦激励信号通入固定于电机转子端部的旋转变压器;通过硬件解码芯片接收旋转变压器反馈的正弦信号和余弦信号,及根据反馈的正弦信号和余弦信号解算出角度和转速,并将解算出的角度和转速发送至电机主控芯片,如图1所示。
2、上述角度解算方案,采用专门的硬件解码芯片。由于硬件解码芯片本身会带来额外的故障概率。因此,上述角度解算方案,增加了电机控制器在角度解算环节的失效风险,为后续的扭矩输出控制增加不确定性,甚至可能导致系统振荡,降低了产品的可靠性与安全性。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种电机控制方法、装置、存储介质及电机控制器。
2、为了实现上述目的,本公开提供一种电机控制方法,所述方法包括:
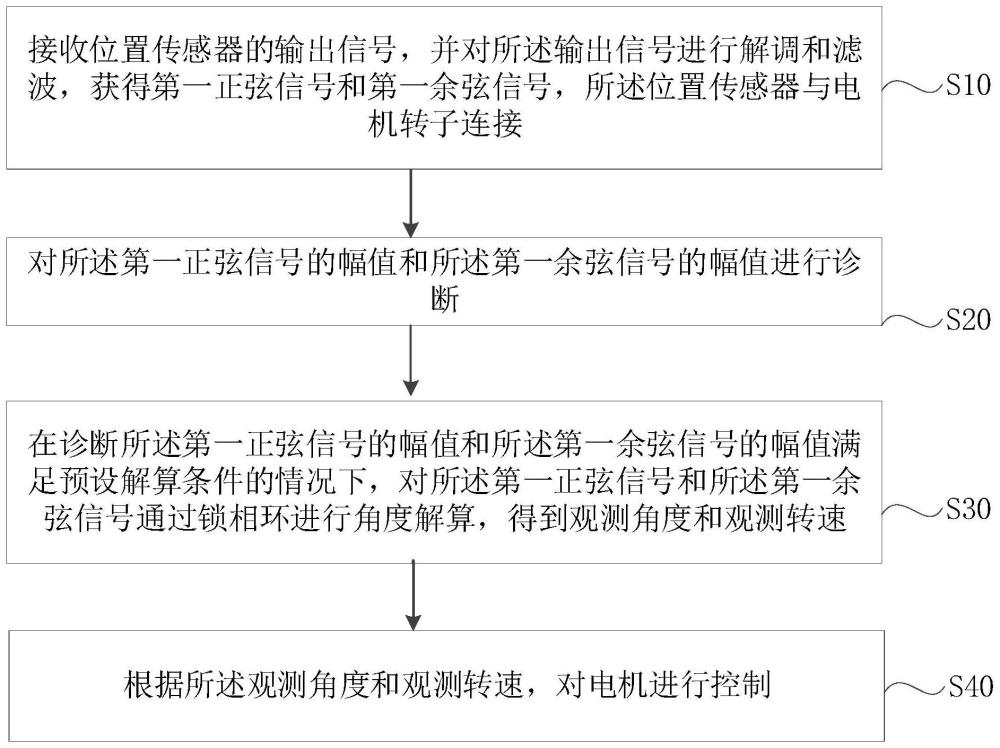
3、接收位置传感器的输出信号,并对所述输出信号进行解调和滤波,获得第一正弦信号和第一余弦信号,所述位置传感器与电机转子连接;
4、对所述第一正弦信号的幅值和所述第一余弦信号的幅值进行诊断;
5、在诊断所述第一正弦信号的幅值和所述第一余弦信号的幅值满足预设解算条件的情况下,对所述第一正弦信号和所述第一余弦信号通过锁相环进行角度解算,得到观测角度和观测转速;
6、根据所述观测角度和观测转速,对电机进行控制。
7、可选地,所述预设解算条件包括:所述第一正弦信号的幅值和所述第一余弦信号的幅值均在预设幅值范围内,且所述第一正弦信号的幅值与所述第一余弦信号的幅值的差异小于或等于预设阈值。
8、可选地,所述方法还包括:
9、在诊断所述第一正弦信号的幅值和第一余弦信号的幅值不满足所述预设解算条件,且所述第一正弦信号的幅值和所述第一余弦信号的幅值只有一者在预设幅值范围内的情况下,确定是否获得上一时刻的观测角度和第一信号的幅值,所述第一信号为所述第一正弦信号和所述第一余弦信号中幅值在预设幅值范围内的信号;
10、在确定获得上一时刻的观测角度和第一信号的幅值的情况下,根据上一时刻的观测角度、第一信号的幅值和当前时刻的第一信号,获得当前时刻的第二信号,其中,当所述第一信号为第一正弦信号时,所述第二信号为第二余弦信号;当所述第一信号为第一余弦信号时,所述第二信号为第二正弦信号;所述第二信号的幅值在预设幅值范围内,且所述第一信号的幅值和所述第二信号的幅值的差异小于或等于所述预设阈值;
11、对当前时刻的第一信号和当前时刻的第二信号通过锁相环进行角度解算,得到观测角度和观测转速。
12、可选地,在所述第一信号为所述第一余弦信号的情况下,所述根据上一时刻的观测角度、第一信号的幅值和当前时刻的第一信号,获得当前时刻的第二信号的步骤包括:
13、根据上一时刻的观测角度获得当前时刻的第二信号的正负符号,当前时刻的第二信号的正负符号为正或负;
14、根据当前时刻的第一信号与第二信号的平方和等于上一时刻的第一信号的幅值的平方和,以及当前时刻的第二信号的正负符号,获得当前时刻的第二信号。
15、可选地,所述方法还包括:
16、在确定没有获得上一时刻的观测角度及没有获得上一时刻的第一信号的幅值的情况下,根据当前时刻的第一信号获得第一推测角度和第二推测角度;
17、向所述电机分别注入对应电机圆周第一推测角度和第二推测角度的电压脉冲矢量,分别获ss得电机第一响应电流和第二响应电流;
18、根据电机电感特性、所述第一响应电流和所述第二响应电流,确定当前时刻的第三信号的角度,所述第三信号的角度等于所述第一推测角度或所述第二推测角度,其中,当所述第一信号为第一正弦信号时,所述第三信号为第三余弦信号;当所述第一信号为第一余弦信号时,所述第三信号为第三正弦信号;所述第三信号的幅值在预设幅值范围内,且所述第一信号的幅值和所述第三信号的幅值的差异小于或等于所述预设阈值;
19、根据当前时刻的第三信号的角度,获得当前时刻的第三信号的正负符号;
20、根据当前时刻的第三信号的正负符号、第一信号和第一信号的预设幅值,获得当前时刻的第三信号;
21、对当前时刻的第一信号和当前时刻的第三信号通过锁相环进行角度解算,得到观测角度和观测转速。
22、可选地,所述根据电机电感特性、所述第一响应电流和所述第二响应电流,确定当前时刻的第三信号的角度的步骤包括:
23、在电机电感特性表征电机定子直轴电感小于或等于电机定子交轴电感的情况下,将所述第一响应电流和第二响应电流中较大的电流对应的推测角度确定为当前时刻的第三信号的角度;
24、在电机电感特性表征电机定子直轴电感大于电机定子交轴电感的情况下,将所述第一响应电流和第二响应电流中较小的电流对应的推测角度减去π的差确定为当前时刻的第三信号的角度。
25、可选地,所述方法还包括:
26、在诊断所述第一正弦信号的幅值和第一余弦信号的幅值不满足所述预设解算条件解算,且所述第一正弦信号的幅值和所述第一余弦信号的幅值均在预设幅值范围内,及所述第一正弦信号的幅值与所述第一余弦信号的幅值的差异大于所述预设阈值的情况下,对所述第一正弦信号的幅值或所述第一余弦信号的幅值进行校正,以使校正后的第一正弦信号的幅值与第一余弦信号的幅值的差异小于或等于预设阈值。
27、本公开还提供一种电机控制装置,所述装置包括:
28、信号获取模块,用于接收位置传感器的输出信号,并对所述输出信号进行解调和滤波,获得第一正弦信号和第一余弦信号,所述位置传感器与电机转子连接;
29、信号诊断模块,用于对所述第一正弦信号的幅值和所述第一余弦信号的幅值进行诊断;
30、角度解算模块,用于在诊断所述第一正弦信号的幅值和所述第一余弦信号的幅值满足预设解算条件的情况下,对所述第一正弦信号和所述第一余弦信号通过锁相环进行角度解算,得到观测角度和观测转速;
31、电机控制模块,用于根据所述观测角度和观测转速,对电机进行控制。
32、本公开还提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述电机控制方法的步骤。
33、本公开还提供一种电机控制器,包括:
34、存储器,其上存储有计算机程序;
35、处理器,用于执行所述存储器中的所述计算机程序,以实现上述电机控制方法的步骤。
36、通过上述技术方案,可以利用位置传感器,如设置于电机转子的旋转变压器,获取转子的观测角度和观测转速,省去了专用的硬件解码芯片,降低了系统复杂度和成本;避免了硬件解码芯片故障造成的角度解算失效,降低硬件失效风险,提高了产品的可靠性与安全性。
37、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!