控制具备增量型编码器的电动机模块的控制器及操作方法与流程
本发明涉及电动机控制,尤其涉及一种用来控制具备增量型编码器(incrementalencoder)的电动机模块的控制器及其操作方法。
背景技术:
1、根据相关技术,电动机可被连接至编码器,例如绝对型编码器或增量型编码器,以供进行精确的控制。绝对型编码器可指出绝对位置或绝对角度。另外,增量型编码器可报告位置变化或角度变化等,而非绝对位置或绝对角度,这使得增量型编码器的内部组件更加简单和经济。然而,可能发生某些问题。举例来说,在增量型编码器和电动机被整合成电动机模块后,典型地需要进行针对电动机的转子的0度及索引信号所指出的索引角度之间的差异的校准,其中相关的人工操作复杂,因此增加了人工成本。在日常使用的期间,每次上电时不能直接启动以进行正常操作,这是因为这个时刻缺乏转子的绝对位置或绝对角度。在进行正常操作以前,需要先控制转子转动至索引信号所指出的上述索引角度以避免错误,这对于在上电时不能被随意转动或移动的机械结构的应用是很不方便的。
2、某些传统方法被提出以尝试解决上列问题,但可能导致某些副作用诸如额外的问题。举例来说,第一传统方法建议将额外的感测器加到增量型编码器,以使不同感测器对应不同编码的编码环,但是这个特殊设计不是通用的结构,并且起始角度的解析是被相关的编码解析度所限制。第二传统方法建议于启动时,先根据三个额外的感测器诸如u感测器、v感测器和w感测器的各自的状态来决定转子的初始角度,再进行某些其余的操作,但是这个特殊设计需要上述三个额外的感测器,且初始角度的最大误差可达到30度。第三传统方法建议藉由检测转子的相关信号以估计转子的可能的初始角度,并且藉由统计方法找出转子的最可能的初始角度,但是估计的角度的误差可以很大,并且转子必须可自由转动且可反转,这表示这个传统方法不适用于在上电时不能被随意转动或移动的机械结构的应用。第四传统方法建议将多个特殊齿轮加到增量型编码器,以使这些特殊齿轮在启动时可以充分地转动,从而确定这些特殊齿轮的相对位置,以确定转子的绝对位置或绝对角度,但是这个特殊设计需要上述多个特殊齿轮,并且转子必须可自由转动,这表示这个传统方法不适用于在上电时不能被随意转动或移动的机械结构的应用。第五传统方法建议将额外的电路诸如绝对位置产生电路以及额外的结构诸如绝对位置码盘加到增量型编码器,但是这个特殊设计需要上述额外的电路以及额外的结构,使得整体结构变复杂且成本增加。
3、由以上可知,上列传统方法会带来其各自的副作用诸如额外的问题等。因此,需要一种新颖的架构,以在没有副作用或较不可能带来副作用之状况下实现低成本的且强健的(robust)电动机控制架构。
技术实现思路
1、本发明的一目的在于公开一种用来控制具备增量型编码器的电动机模块的控制器及其操作方法,以解决上述问题。
2、本发明的另一目的在于公开一种用来控制具备增量型编码器的电动机模块的控制器及其操作方法,以在没有副作用或较不可能带来副作用的状况下实现低成本的且强健的电动机控制架构。
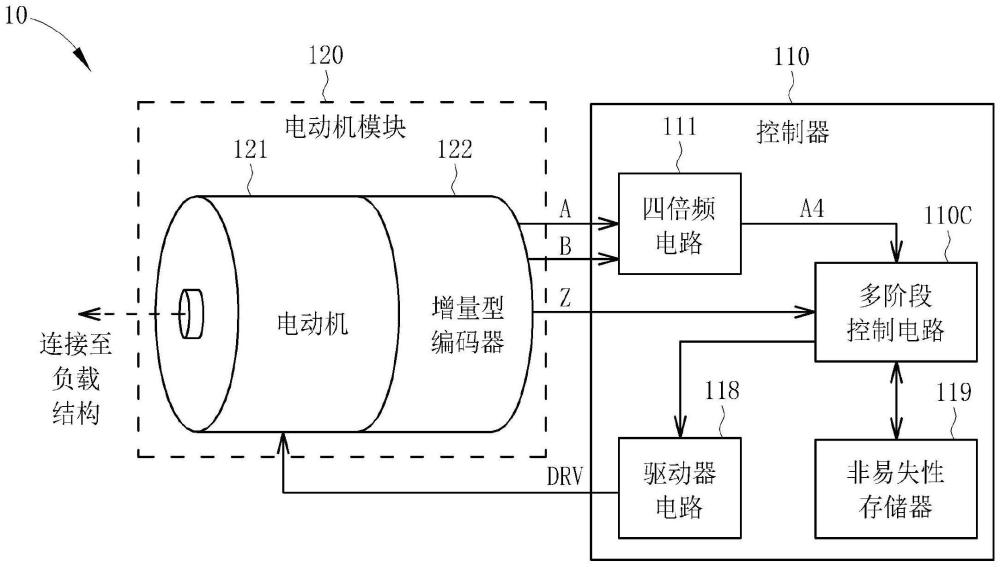
3、本发明的至少一实施例公开一种用来控制具备增量型编码器的电动机模块的控制器,其中所述电动机模块包含电动机和所述增量型编码器。所述控制器可包含:四倍频电路,耦接至所述增量型编码器;驱动器电路,耦接至所述电动机;非易失性存储器(non-volatile memory,可简称为nvm);以及多阶段控制电路,耦接至所述四倍频电路、所述驱动器电路和所述非易失性存储器。举例来说,所述四倍频电路可用来依据所述增量型编码器所输出的第一输出信号和第二输出信号产生四倍频信号,其中所述第一输出信号和所述第二输出信号具有相同的频率,以及所述第一输出信号和所述第二输出信号之间的相位差等于预定相位差;所述驱动器电路可用来产生至少一驱动信号以驱动所述电动机;所述非易失性存储器可用来存储信息;以及所述多阶段控制电路可用来借助于所述非易失性存储器进行对应于多个阶段的多阶段控制,其中所述多个阶段包含自动校准阶段和直接启动阶段,以及所述多阶段控制电路包含计数器,其耦接至所述四倍频电路。所述计数器可用来分别于所述自动校准阶段和所述直接启动阶段中,接收所述四倍频信号以作为时钟信号且依据所述时钟信号进行计数操作,以供控制所述电动机模块。另外,所述多阶段控制中的对应于所述直接启动阶段的操作可包含:从所述非易失性存储器读取偏移计数器值,其中所述偏移计数器值是于所述自动校准阶段中取得;执行初始角度估计程序以取得所述电动机中的转子的估计的初始角度,依据所述估计的初始角度以及所述偏移计数器值产生初始计数器值以供写入至所述计数器,并且开始利用所述驱动器电路控制所述电动机以所述估计的初始角度直接启动且利用所述计数器进行计数操作;响应于所述增量型编码器所输出的索引信号为活跃(active),计算所述计数器的目前计数器值和所述偏移计数器值之间的差值以作为所述初始计数器值的计数器值误差,并且清除所述计数器的所述目前计数器值以成为零;以及依据所述计数器值误差分别进行对应于预定补偿次数的补偿以控制所述转子达到目标角度。
4、本发明的至少一实施例公开一种用来控制具备增量型编码器的电动机模块的控制器的操作方法,其中所述电动机模块包含电动机和所述增量型编码器。所述操作方法可包含:利用四倍频电路依据所述增量型编码器所输出的第一输出信号和第二输出信号产生四倍频信号,其中所述第一输出信号和所述第二输出信号具有相同的频率,以及所述第一输出信号和所述第二输出信号之间的相位差等于预定相位差;利用驱动器电路产生至少一驱动信号以驱动所述电动机;以及利用多阶段控制电路借助于非易失性存储器进行对应于多个阶段的多阶段控制,其中所述多个阶段包含自动校准阶段和直接启动阶段,以及所述多阶段控制电路中的计数器是用来分别于所述自动校准阶段和所述直接启动阶段中,接收所述四倍频信号以作为时钟信号且依据所述时钟信号进行计数操作,以供控制所述电动机模块。另外,所述多阶段控制中的对应于所述直接启动阶段的操作可包含:从所述非易失性存储器读取偏移计数器值,其中所述偏移计数器值是于所述自动校准阶段中取得;行初始角度估计程序以取得所述电动机中的转子的估计的初始角度,依据所述估计的初始角度以及所述偏移计数器值产生初始计数器值以供写入至所述计数器,并且开始利用所述驱动器电路控制所述电动机以所述估计的初始角度直接启动且利用所述计数器进行计数操作;响应于所述增量型编码器所输出的索引信号为活跃,计算所述计数器的目前计数器值和所述偏移计数器值之间的差值以作为所述初始计数器值的计数器值误差,并且清除所述计数器的所述目前计数器值以成为零;以及依据所述计数器值误差分别进行对应于预定补偿次数的补偿以控制所述转子达到目标角度。
5、本发明的多个好处的其中之一是,所述控制器可在使用一般的增量型编码器的情况下达到接近绝对型编码器的精确度,而不需要在增量型编码器中设计任何特殊结构。另外,所述多阶段控制中的对应于所述自动校准阶段的操作只需要执行一次(例如,于所述电动机模块的生产及/或设置阶段中,在所述电动机和所述增量型编码器被彼此连接后),以将所述偏移计数器值存储至所述非易失性存储器中。此外,于所述直接启动阶段中,所述控制器可控制所述电动机直接启动以进行正常操作,而不需要进行转子位置初始化(例如先控制转子转动至索引信号所指出的上述索引角度),因此适合各种应用,尤其,在上电时不能被随意转动或移动的机械结构的应用。
- 还没有人留言评论。精彩留言会获得点赞!