电压钳位电路、马达驱动芯片及电压钳位控制方法与流程
1.本发明属于芯片控制电路技术领域,涉及一种驱动芯片,尤其涉及一种电压钳位电路、马达驱动芯片及电压钳位控制方法。
背景技术:
2.马达驱动芯片是一类电机驱动芯片,一般利用该类芯片加上主处理器、电机及编码器等共同完成驱动直流电机、步进电机和继电器等感性负载。在马达驱动芯片的内部组成结构中,以四个n型沟道mos管搭建的h桥电路作为输出级是马达驱动芯片的核心部分,如图1所示。
3.该部分通过充电泵电路为上桥臂的第一mos管m1和第二mos管m2供电,在上桥臂与下桥臂之间则是两个输出端口out1和out2,输出端口之间则是连接着感性负载马达,通过数字逻辑电路可以控制h桥的四个n型沟道mos管的栅极电压,进而控制四个n型沟道mos管的导通状态从而控制输出电流的方向及大小,最终实现对马达的驱动功能。
4.在图1所示的h桥电路中,当数字逻辑电路控制第一mos管m1和第四mos管m4的栅极为高电平时,m1和m4导通,电流流向从out1至out2,设定此时的电流方向驱动电机正转;当数字逻辑电路控制第二mos管m2和第三mos管m3的栅极为高电平时,m2和m3导通,电流流向从out2至out1,此时的电流方向驱动电机反转。那么当马达进行正反转之间的切换或其他状态切换时,由于信号切换过程中可能导致切换瞬间存在同一侧上桥臂和下桥臂的n型沟道mos管同时导通,使马达驱动芯片失去驱动电机的能力,为此需要加入死区时间来防止这一现象发生。
5.加入死区时间后,即在进行马达状态的切换操作时,通过数字逻辑电路控制h桥的四个n型沟道mos管的栅极电压同时为低电平,则此时四个n型沟道mos管均不导通,电感电流通过h桥电路中n型沟道mos管衬底和漏极之间的寄生二极管进行维系,这样能有效地防止马达驱动芯片在状态切换时出现误触发的情况。
6.然而,工作在死区时间内的马达驱动芯片也存在其他风险,当进行状态切换时,由于电感电流不能突变,而四个n型沟道mos管的沟道均不导通,则会出现负电流经由电阻rs以及下桥臂的n型沟道mos管的衬底和漏极之间的寄生二极管流入芯片以维持感性负载电流不能突变的电流需求,从而导致输出电压呈负值的情况。
7.当出现了上述情况使输出电压呈负压的情况时,由于电阻rs的存在,在芯片与负载电机相连的输出端的电压可能会很低,即可能使芯片内与该输出端相连的其他器件或电路损坏,最终可能造成芯片参数变坏甚至部分功能失效的危害。
8.图2为一种传统内部集成有电流检测模块的马达驱动芯片输出级部分结构示意图;请参阅图2,假设当该芯片的数字逻辑模块控制ct1和ct4信号为高点平且ct2和ct3信号为低电平,即h桥电路中的第一mos管m1和第四mos管m4导通,第二mos管m2和第三mos管m3不导通,充电泵电路为h桥电路中的上桥臂mos管m1和m2提供漏极电压,此时输出电流方向为从out1流向out2,记此时马达驱动芯片的工作状态为驱动电机正转,由于第四mos管m4存在
有导通阻抗,并且该导通阻抗很小,所以会在其漏极产生一个值约为输出电流乘以第四mos管m4的导通阻抗的电压,该电压大小与输出电流成正比关系。但是由于h桥电路中的第三n型场效应晶体管m3不导通,故逻辑电路输出控制图中第三n型沟道mos管nm3栅极的信号a为低电平,于是由检测电阻r1、第三n型沟道mos管nm3和第二n型沟道mos管nm2构成的内部电流检测电路处于不工作状态,不进行输出电流的检测。
9.假设当该芯片的数字逻辑模块控制ct2和ct3信号为高电平,即h桥电路中的第二mos管m2和第三mos管m3导通,充电泵电路为h桥电路中的上桥臂mos管m1和m2提供漏极电压,此时输出电流方向为从out2流向out1,记此时马达驱动芯片的工作状态为驱动电机反转。由于第三mos管m3存在有导通阻抗,并且该导通阻抗很小,所以会在其漏极产生一个值约为输出电流乘以第三mos管m3的导通阻抗的电压,该电压大小与输出电流成正比关系。当h桥电路中的第三mos管m3导通时,逻辑电路输出控制图中第三n型沟道mos管nm3栅极的信号a为高电平,于是由检测电阻r1、第三n型沟道mos管nm3和第二n型沟道mos管nm2构成的内部电流检测电路处于工作状态,通过该结构得到的输出为第二n型沟道mos管nm2的漏极和第三n型沟道mos管nm3的源极相连接的部分,即输出端x,并可以通过包含输出电流信息的输出端x的电压值大小去进行后续相关制动操作等。
10.当该芯片的数字逻辑模块控制由ct1和ct4信号为高电平,ct2和ct3信号为低电平切换至ct1、ct4为低电平,ct2、ct3为高电平,即将h桥电路中的第一mos管m1和第四mos管m4导通时的驱动电机正转的工作状态切换至h桥电路中的第二mos管m2和第三mos管m3导通时的驱动电机反转的工作状态时,由于加入了死区时间以防止h桥电路的同侧的上桥臂和下桥臂同时导通的情况发生,故在一段时间内会先控制ct1、ct4由高电平变为低电平,同时保持ct2和ct3的低电平状态。即h桥电路中的四个n型沟道mos管均不导通,由于感性负载l1的电流不能突变,导致在控制ct1、ct4的信号切换的瞬间,负电流经过电阻rs和h桥电路中的第三mos管m3衬底到漏极的寄生二极管流入芯片来保持电感电流不突变,这样会使输出端out1的电压值为一负值。又由于输出端out1和输出端b是通过电阻r1相连接的,所以会使输出端b的电压值也为一负值,可能造成第三n型沟道mos管衬底和漏极之间的寄生二极管导通,使得该支路电路工作状态异常,造成器件的损坏。同时可能对与输出端b相连的其他器件或电路造成损坏,造成芯片的参数变坏或者部分功能失效等问题。
11.上述在马达驱动芯片死区时间内,由于忽视对输出端电压的钳位措施,可能会使部分与输出端相连接的器件或电路损坏或工作状态异常,造成芯片参数变坏或者部分功能失效,这也是传统马达驱动芯片可能会出现的一个风险。
12.综合以上考虑,如今迫切需要设计一种新的马达驱动芯片,以便克服上述现有马达驱动芯片死区时间内存在的上述至少部分缺陷。
技术实现要素:
13.本发明提供一种电压钳位电路、马达驱动芯片及电压钳位控制方法,可解决传统马达驱动芯片死区时间内输出端电压为负值导致的一系列风险,提升电路的稳定性和可靠性。
14.为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:一种电压钳位电路,马达驱动芯片设有第一输出端out1、输出端x、输出端b;所述
电压钳位电路包括:基准电流源,用以提供电流;第一电流镜,连接所述基准电流源,用以将所述基准电流源提供的电流进行镜像;第二电流镜,连接所述第一电流镜,用以将所述第一电流镜输出的电流提供给至一钳位电路及输出端x;电流检测电路,能连接马达驱动芯片,用以检测马达驱动芯片设定输出端的输出电流;电流检测控制电路,连接所述电流检测电路,用以控制所述电流检测电路的电流检测工作;连接电路,连接输出端x,用以在所述电流检测控制电路控制所述电流检测电路不进行电流检测时,将输出端x输出的电压拉低;钳位电路,连接输出端x、输出端b,用以在马达驱动芯片工作在死区时间内对输出端b输出的电压进行钳位。
15.作为本发明的一种实施方式,所述电流检测控制电路连接有信号输入端a,通过信号输入端a输入的信号生成向所述电流检测电路的控制信号;所述电流检测电路包括第一电阻r1、第八n型沟道mos管nm8;所述第一电阻r1的第一端连接马达驱动芯片的第一输出端out1,所述第一电阻r1的第二端连接输出端b;所述第八n型沟道mos管nm8的栅极连接第一电流镜,第八n型沟道mos管nm8的漏极连接电流检测控制电路,第八n型沟道mos管nm8的源极接地。
16.作为本发明的一种实施方式,所述电压钳位电路进一步包括滤波电路,所述滤波电路连接信号输入端a,用以防止从信号输入端a输出的信号波动引起的误触发情况;所述滤波电路包括第一电容c1及第三电阻r3,所述第三电阻r3的第一端连接电流检测控制电路,所述第三电阻r3的第二端连接第一电容c1的第一端,第一电容c1的第二端接地。
17.作为本发明的一种实施方式,所述电压钳位电路进一步包括电压保护电路,所述电压保护电路连接输出端x,用以对输出端x输出的电压进行保护;所述电压保护电路包括第二二极管d2,所述第二二极管d2的正极接地,所述第二二极管d2的负极连接输出端x。
18.作为本发明的一种实施方式,所述钳位电路包括第一二极管d1、第二电阻r2、第三n型沟道mos管nm3、第四n型沟道mos管nm4、第五n型沟道mos管nm5、第六n型沟道mos管nm6;所述第三n型沟道mos管nm3、第四n型沟道mos管nm4形成第一对管结构,所述第五n型沟道mos管nm5、第六n型沟道mos管nm6形成第二对管结构;所述第三n型沟道mos管nm3的漏极分别连接第二电流镜、第三n型沟道mos管nm3的栅极、第四n型沟道mos管nm4的栅极;所述第三n型沟道mos管nm3的源极分别连接第五n型沟道mos管nm5的漏极、第五n型沟道mos管nm5的栅极、第六n型沟道mos管nm6的栅极;所述第四n型沟道mos管nm4的漏极连接电源电压vcc,所述第四n型沟道mos管nm4的源极分别连接第六n型沟道mos管nm6的漏极、第一二极管d1的正极;所述第五n型沟道mos管nm5的源极接地;所述第六n型沟道mos管nm6的源极连接输
出端x;所述第一二极管d1的负极连接第二电阻r2的第一端,第二电阻r2的第二端连接输出端b。
19.作为本发明的一种实施方式,所述电流检测控制电路包括第七n型沟道mos管nm7,所述第七n型沟道mos管nm7的删节连接信号输入端a,能接收数字逻辑电路输出的控制信号;所述第七n型沟道mos管nm7的漏极连接电流检测电路,第七n型沟道mos管nm7的源极连接输出端x。
20.作为本发明的一种实施方式,所述第一电流镜包括第一n型沟道mos管nm1、第二n型沟道mos管nm2;所述第二电流镜包括第一p型沟道mos管pm1及第二p型沟道mos管pm2;所述基准电流源的输出端分别连接所述第一n型沟道mos管nm1的漏极、第一n型沟道mos管nm1的栅极、第二n型沟道mos管nm2的栅极;所述第一n型沟道mos管nm1的源极、第二n型沟道mos管nm2的源极;所述第二n型沟道mos管nm2的漏极分别连接第一p型沟道mos管pm1的漏极及第二p型沟道mos管pm2的漏极;电源电压vcc分别连接所述第一p型沟道mos管pm1的源极及第二p型沟道mos管pm2的源极;所述第二p型沟道mos管pm2的漏极连接所述钳位电路。
21.作为本发明的一种实施方式,所述连接电路包括第三p型沟道mos管pm3、第九n型沟道mos管nm9及第十n型沟道mos管nm10;所述第三p型沟道mos管pm3的源极连接电源电压vcc,所述第三p型沟道mos管pm3的栅极连接第二电流镜,所述第三p型沟道mos管pm3的漏极分别连接第九n型沟道mos管nm9的漏极、第十n型沟道mos管nm10的栅极;所述第九n型沟道mos管nm9的栅极连接有滤波电路,所述第十n型沟道mos管nm10的漏极连接输出端x;所述第九n型沟道mos管nm9的源极、第十n型沟道mos管nm10的源极分别接地。
22.根据本发明的另一个方面,采用如下技术方案:一种马达驱动芯片,所述马达驱动芯片包括:h桥电路、数字逻辑电路、上述的电压钳位电路;所述数字逻辑电路分别连接h桥电路及电压钳位电路,所述h桥电路连接所述电压钳位电路。
23.根据本发明的又一个方面,采用如下技术方案:一种上述马达驱动芯片的电压钳位控制方法,所述电压钳位控制方法包括:当马达驱动芯片未进入死区时间内时,通过数字逻辑电路控制h桥电路中四个n型沟道mos管的栅极电压来完成对其导通状态的控制;当马达驱动芯片进入死区时间内时,通过数字逻辑电路控制h桥电路中四个n型沟道mos管的栅极电压均为低电平,同时通过电压钳位电路将输出端b的输出电压控制在设定值。
24.本发明的有益效果在于:本发明提出的电压钳位电路、马达驱动芯片及电压钳位控制方法,可以解决传统马达驱动芯片在进行工作状态切换的死区时间内,由于自身结构问题所产生的输出电压呈负值的情况,导致输出点b电压也为负值,可能对与相关结点相连
的器件造成损坏,进而造成芯片的参数变坏或者功能失效等风险,提升电路的稳定性和可靠性。
25.当芯片工作在死区时间内需要继续为感性负载提供电流时,负电流仍然会通过h桥电路中的电阻rs和第三mos管m3流入芯片使得输出端out1电压变负,但是通过发明结构内的第四n型沟道mos管nm4和二极管d1能够使得输出端b的电压钳位在0v左右,并且由于n型沟道mos管的电流电压性质可知,该部分的电流驱动能力也较强。
附图说明
26.图1为现有马达驱动芯片h桥电路的部分电路示意图。
27.图2为传统的马达驱动芯片输出级的部分电路示意图。
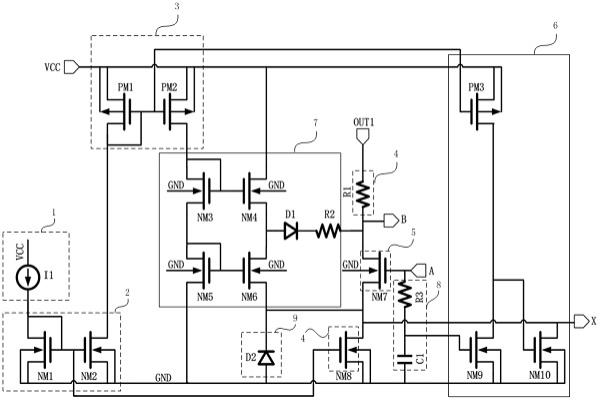
28.图3为本发明一实施例中电压钳位电路的电路示意图。
29.图4为本发明一实施例中电压钳位电路在一应用场景下的电路示意图。
具体实施方式
30.下面结合附图详细说明本发明的优选实施例。
31.为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
32.该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
33.需要说明的是,本发明中诸如第一和第二等之类的关系术语仅仅用来将一个实体或操作与另一个实体或操作区分,并不代表实体或操作之间存在任何实际的关系或顺序。本发明所提供的图示仅以示意方式说明本发明的基本构想,图中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
34.说明书中各个实施例中的步骤的表述只是为了方便说明,本技术的实现方式不受步骤实现的顺序限制。
35.说明书中的“连接”既包含直接连接,也包含间接连接,如通过一些有源器件、无源器件或电传导媒介进行的连接;还可包括本领域技术人员公知的在可实现相同或相似功能目的的基础上通过其他有源器件或无源器件的连接,如通过开关、跟随电路等电路或部件的连接。
36.本发明揭示一种电压钳位电路(可作为应用于马达驱动芯片死区时间内的电压钳位电路),图3为本发明一实施例中电压钳位电路结构示意图;请参阅图3,马达驱动芯片设有第一输出端out1、输出端x、输出端b;所述电压钳位电路包括:基准电流源1、第一电流镜2、第二电流镜3、电流检测电路4、电流检测控制电路5、连接电路6及钳位电路7。
37.所述基准电流源1用以提供电流;在一实施例中,所述基准电流源1能为电压钳位电路提供稳定的基准电流。如图3所示,基准电流源1可以包括第一基准电流源i1。
38.所述第一电流镜2连接所述基准电流源1,用以将所述基准电流源1提供的电流进
行镜像。所述第二电流镜3连接所述第一电流镜2,用以将所述第一电流镜2输出的电流提供给至一钳位电路及输出端x。
39.请参阅图3,在本发明的一实施例中,所述第一电流镜2包括第一n型沟道mos管nm1、第二n型沟道mos管nm2。所述基准电流源1的输出端分别连接所述第一n型沟道mos管nm1的漏极、第一n型沟道mos管nm1的栅极、第二n型沟道mos管nm2的栅极;所述第一n型沟道mos管nm1的源极、第二n型沟道mos管nm2的源极。
40.所述第二电流镜3包括第一p型沟道mos管pm1及第二p型沟道mos管pm2。所述第二n型沟道mos管nm2的漏极分别连接第一p型沟道mos管pm1的漏极及第二p型沟道mos管pm2的漏极;电源电压vcc分别连接所述第一p型沟道mos管pm1的源极及第二p型沟道mos管pm2的源极;所述第二p型沟道mos管pm2的漏极连接所述钳位电路(第三n型沟道mos管nm3的漏极、第三n型沟道mos管nm3的栅极、第四n型沟道mos管nm4的栅极)。所述第二电流镜3为了将由第二n型沟道mos管nm2镜像得到的电流通过第二p型沟道mos管pm2提供至后续结构部分。
41.所述电流检测电路4能连接马达驱动芯片,用以检测马达驱动芯片设定输出端的输出电流。如图3所示,在本发明的一实施例中,所述电流检测控制电路4连接有信号输入端a,通过信号输入端a输入的信号生成向所述电流检测电路的控制信号。在一实施例中,所述电流检测电路4包括第一电阻r1、第八n型沟道mos管nm8;所述第一电阻r1的第一端连接马达驱动芯片的第一输出端out1,所述第一电阻r1的第二端连接输出端b;所述第八n型沟道mos管nm8的栅极连接第一电流镜,第八n型沟道mos管nm8的漏极连接电流检测控制电路,第八n型沟道mos管nm8的源极接地。在一实施例中,所述电流检测电路4用以检测是输出端b的输出电流,但是作用生效发生在输出端x;第七n型沟道mos管nm7是控制是否启用输出电流的检测功能,如果第七n型沟道mos管nm7不导通,输出端b输出的信号也无法传输到输出端x,也就不能实现检测功能的进一步运作。
42.在一实施例中,第一电阻r1能间接检测马达驱动芯片输出电流大小,通过与h桥电路中第三mos管m3的导通内阻并联对输出电流进行分流,并且在第一电阻r1两端形成电压降,并通过第七n型沟道mos管nm7将输出电流信息传递到输出端x,转化为电压并进行后续相关处理,可以用于进行芯片电流过流保护的检测结构部分。
43.所述电流检测控制电路5连接所述电流检测电路4,用以控制所述电流检测电路的电流检测工作。如图3所示,在本发明的一实施例中,所述电流检测控制电路5包括第七n型沟道mos管nm7,所述第七n型沟道mos管nm7的删节连接信号输入端a,能接收数字逻辑电路输出的控制信号;所述第七n型沟道mos管nm7的漏极连接电流检测电路,第七n型沟道mos管nm7的源极连接输出端x。
44.由数字逻辑电路输出控制信号至信号输入端a,控制第七n型沟道mos管nm7的栅极电压来控制第七n型沟道mos管nm7的导通状态,从而控制当h桥电路中的第三mos管m3导通时的相关的输出电流检测是否正常进行。
45.所述连接电路6连接输出端x,用以在所述电流检测控制电路控制所述电流检测电路不进行电流检测时,将输出端x输出的电压拉低。如图3所示,在本发明的一实施例中,所述连接电路6包括第三p型沟道mos管pm3、第九n型沟道mos管nm9及第十n型沟道mos管nm10。所述第三p型沟道mos管pm3的源极连接电源电压vcc,所述第三p型沟道mos管pm3的栅极连接第二电流镜,所述第三p型沟道mos管pm3的漏极分别连接第九n型沟道mos管nm9的漏极、
第十n型沟道mos管nm10的栅极。所述第九n型沟道mos管nm9的栅极连接有滤波电路,所述第十n型沟道mos管nm10的漏极连接输出端x;所述第九n型沟道mos管nm9的源极、第十n型沟道mos管nm10的源极分别接地。
46.所述连接电路6可以在不是由信号输入端a接收的控制信号控制的输出电流检测时,将输出端x的电压拉低。
47.所述钳位电路7连接输出端x、输出端b,用以在马达驱动芯片工作在死区时间内对输出端b输出的电压进行钳位。如图3所示,在本发明的一实施例中,所述钳位电路7包括第一二极管d1、第二电阻r2、第三n型沟道mos管nm3、第四n型沟道mos管nm4、第五n型沟道mos管nm5、第六n型沟道mos管nm6。所述第三n型沟道mos管nm3、第四n型沟道mos管nm4形成第一对管结构,所述第五n型沟道mos管nm5、第六n型沟道mos管nm6形成第二对管结构。两个对管结构为了给关键的第四n型沟道mos管nm4和第六n型沟道mos管nm6提供栅极电压。
48.所述第三n型沟道mos管nm3的漏极分别连接第二电流镜、第三n型沟道mos管nm3的栅极、第四n型沟道mos管nm4的栅极。所述第三n型沟道mos管nm3的源极分别连接第五n型沟道mos管nm5的漏极、第五n型沟道mos管nm5的栅极、第六n型沟道mos管nm6的栅极。所述第四n型沟道mos管nm4的漏极连接电源电压vcc,所述第四n型沟道mos管nm4的源极分别连接第六n型沟道mos管nm6的漏极、第一二极管d1的正极。所述第五n型沟道mos管nm5的源极接地;所述第六n型沟道mos管nm6的源极连接输出端x。所述第一二极管d1的负极连接第二电阻r2的第一端,第二电阻r2的第二端连接输出端b。
49.此外,所述电压钳位电路还可以包括滤波电路8,所述滤波电路8连接信号输入端a,用以防止从信号输入端a输出的信号波动引起的误触发情况。在一实施例中,所述滤波电路8包括第一电容c1及第三电阻r3,所述第三电阻r3的第一端连接电流检测控制电路,所述第三电阻r3的第二端连接第一电容c1的第一端,第一电容c1的第二端接地。
50.所述电压钳位电路可以进一步包括电压保护电路9,所述电压保护电路9连接输出端x,用以对输出端x输出的电压进行保护。在一实施例中,所述电压保护电路9包括第二二极管d2,所述第二二极管d2的正极接地,所述第二二极管d2的负极连接输出端x。
51.所述第一二极管d1的正极与第四n型沟道mos管nm4的源极和第六n型mos管nm6的漏极连接在一起,第一二极管d1的负极与第二电阻r2串联连接到第七n型沟道mos管nm7的漏极和第一电阻r1的一端上;目的是为了在马达驱动芯片工作在死区时间内产生新的通路完成对输出点b的电压钳位功能。第二二极管d2的正极连接在gnd,第二二极管d2的负极与第六n型沟道mos管nm6的源极、第七n型沟道mos管nm7的源极以及第八n型沟道mos管nm8的漏极共同连接至输出端x,目的是对输出端x输出的电压进行保护。所述第二电阻r2与第一二极管d1串联,起到防止第一二极管d1被击穿或者因电流过大而烧坏的保护作用。
52.与图2所示的马达驱动芯片输出级结构不同,本发明一实施例中的结构使用了第一二极管d1及相关驱动电路为在死区时间内的马达驱动芯片的感性负载提供一个新的电流通路,防止因负电流通过相关n型沟道mos管的衬底和漏极之间的寄生二极管流入芯片造成的输出端b电压为负值的情况发生,完成对芯片输出端b处电压的钳位,进而防止上述风险可能产生的不利后果。
53.图4为本发明一实施例中电压钳位电路在一应用场景下的电路示意图;请参阅图4,假设当该芯片的数字逻辑模块控制ct1和ct4信号为高电平且ct2和ct3信号为低电平,即
h桥电路中的第一mos管m1和第四mos管m4导通,第二mos管m2和第三mos管m3不导通;充电泵电路为h桥电路中的上桥臂mos管m1和m2提供漏极电压,此时输出电流方向为从out1流向out2,记此时马达驱动芯片的工作状态为驱动电机正转。此时由于逻辑电路输出的ct2信号为低电平,此时控制进行电流检测功能是否启动的信号a也为低电平,即第七n型沟道mos管nm7不导通,不进行输出电流的检测。
54.假设当该芯片的数字逻辑模块控制ct2和ct3信号为高电平且ct1和ct4信号为低电平,即h桥电路中第二mos管m2和第三mos管m3导通,第一n型沟道mos管nm1和第四n型沟道mos管nm4不导通,充电泵电路为h桥电路中的上桥臂mos管m1和m2提供漏极电压;此时输出电流方向为从out2流向out1,记此时马达驱动芯片的工作状态为驱动电机反转,此时控制进行电流检测功能是否启动的信号输入端a也为高电平,即第七n型沟道mos管nm7导通,进行输出电流的检测。此时,由于此时输出端x的电压大于0v,故第六n型沟道mos管nm6的栅源电压不满足其开启电压,故第六n型沟道mos管nm6不导通。同时,只需要挑选合适导通电压的二极管d1就能够保证二极管d1此时不导通,故对电流检测部分没有任何影响且不会有额外的功耗产生。
55.但当芯片的数字逻辑模块控制由ct1和ct4信号为高电平,ct2和ct3信号为低电平切换至ct1和ct4信号为低电平,ct2和ct3信号为高电平,即将h桥电路中第一mos管m1和第四mos管m4导通时的驱动电机正转的工作状态切换至h桥电路中的第二mos管m2和第三mos管m3导通时的驱动电机反转的工作状态时,由于引入了死区时间以防止h桥电路的同侧的上桥臂和下桥臂同时导通的情况发生,故在一段时间内会先控制ct1、ct4由高电平变为低电平,同时保持ct2和ct3的低电平状态。即h桥电路的四个n型nmos管均不导通,由于感性负载l1的电流不能突变,导致在控制ct1、ct4的信号切换的瞬间,负电流经由电阻rs和h桥电路中第三n型沟道mos管的衬底和漏极之间的寄生二极管流入芯片提供感性负载所需的电流,故输出端out1的电压降低为一负值。又由于输出端out1和输出端b是通过电阻r1相连接的,故输出端b的电压值也有变为负值的趋势,加上第十n型沟道mos管nm10导通,使得x点电压下降。当x点电压下降至0v左右时,由于第六n型沟道mos管nm6导通,并且根据第五n型沟道mos管nm5的连接方式可以推断,二极管d1的正极电压应该等于第五n型沟道mos管nm5的vth(on),故只需要选择合适导通电压ud1的二极管d1,就可以满足vth(on)-ud1-i*r2=0,即可把输出端b的电压值钳位在0v左右。
56.本发明还揭示一种马达驱动芯片,所述马达驱动芯片包括:h桥电路、数字逻辑电路、上述的电压钳位电路;所述数字逻辑电路分别连接h桥电路及电压钳位电路,所述h桥电路连接所述电压钳位电路。
57.本发明进一步揭示一种上述马达驱动芯片的电压钳位控制方法,所述电压钳位控制方法包括:当马达驱动芯片未进入死区时间内时,通过数字逻辑电路控制h桥电路中四个n型沟道mos管的栅极电压来完成对其导通状态的控制;当马达驱动芯片进入死区时间内时,通过数字逻辑电路控制h桥电路中四个n型沟道mos管的栅极电压均为低电平,同时通过电压钳位电路将输出端b的输出电压控制在设定值。
58.综上所述,本发明提出的应用于马达驱动芯片在死区时间内的电压钳位电路,可解决传统马达驱动芯片在死区时间内输出端电压为负值,可能导致与输出端相连的器件或电路损坏而造成各种不利后果的风险,加强了芯片的稳定性及可靠性。
59.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
60.这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。实施例中所涉及的效果或优点可因多种因素干扰而可能不能在实施例中体现,对于效果或优点的描述不用于对实施例进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1