一种新能源发电和负荷混合模型辨识建模方法与流程
1.本发明属于电力系统安全稳定分析领域,更具体地,涉及一种新能源发电和负荷混合模型辨识建模方法。
背景技术:
2.随着我国构建以新能源为主体的新型电力系统目标的提出,新能源高比例接入电力系统将成为必然趋势。而新能源出力具有随机性、间歇性、波动性的特点,高比例新能源并网将对电力系统安全稳定产生重要影响。分析电力系统安全稳定的重要前提则在于能够搭建反映元件动态特征的仿真模型准确模拟系统故障暂态过程。
3.在当前新能源高渗透背景下,负荷端混合有大量的新能源发电、分布式电源,如何在新能源高比例渗透下构建混合辨识模型以适应新型电力系统下安全稳定分析需求迫在眉睫。现有方法中混合模型辨识中的新能源发电采用异步发电机模型和换流器模型,或者直流和换流器模型,但由于新能源机组特性和换流器的控制逻辑种类很多,并且非常复杂,仅基于并网点量测难以进行合理的直接建模和求解。此外,目前电力系统动态分析往往基于三相工频系统进行,新能源发电并网评估指标也往往参照一次调频能力、转动惯量、一次调压等常规火电机组同步发电机特性设定,而随着虚拟同步发电机(virtual synchronous generator,vsg)技术的广泛应用,新能源经并网逆变器呈现出同步发电机运行特性,显然现有新能源发电的异步发电机模型与电力系统安全稳定分析的需求不相匹配,从外特性角度考虑将新能源机组等效为常规三相同步发电机组为混合模型辨识提供了新思路。另外,随着大规模新能源的接入,电力系统对安全稳定性提出了更高的要求,这也使得新能源由“跟网型”逐渐向“构网型”转化,而常规新能源机组辨识并未对两种类型换流器进行区分,而这两类换流器将导致全然不同的并网功频响应特性,其参数的初始点选择和搜索空间也有很大不同,难以用一个等值机组进行表示,因此需考虑分别建模。
技术实现要素:
4.为解决现有技术中存在的不足,本发明提供一种一种适用于电力系统安全稳定分析的新能源发电和负荷混合模型辨识建模方法。通过构建新能源虚拟同步发电机辨识模型和新能源控制辨识模型、电动机模型、综合负荷静态模型,实现电力系统安全稳定分析的系统化、精细化建模,为电力系统安全稳定运行分析提供可靠依据。
5.本发明采用如下的技术方案。
6.一种新能源发电和负荷混合模型辨识建模方法,包括以下步骤:
7.步骤一,基于新能源并网后呈现出的同步发电机特性及电力系统安全稳定分析基于三相工频的需求,为风机、光伏、储能、或者风储打捆,光储打捆发电建立虚拟同步发电机模型;
8.步骤二,为新能源发电机模型配置调速和励磁控制系统模型;
9.步骤三,将步骤一和步骤二中构建的新能源虚拟同步发电机模型进一步分成构网
型虚拟机和跟网型虚拟机,并采用不同的参数搜索范围空间对构网型风电、跟网型风电、构网型光伏、跟网型光伏、构网型储能、跟网型储能等不同类型新能源vsg模型差异化建模;
10.步骤四,根据电网中暂态录波记录数据中是否有谐波和间谐波量,设置谐波、间谐波电压源型虚拟发电机;
11.步骤五,根据电动机负荷性质将电动机负荷分为冲击型和平稳型进行建模,并结合静态负荷模型,构建综合负荷模型。
12.优选地,步骤一中,新能源虚拟发电机定子电压方程、转子电压方程、运动方程分别为:
13.ud=x
q-i
q-rid14.uq=eq'-xd'i
d-riq[0015][0016][0017][0018]
其中,u为绕组电压;i为绕组电流;r为绕组电阻;xd为发电机d轴同步电抗,标幺值;x
d’为发电机d轴暂态电抗,标幺值;xq为发电机q轴同步电抗,标幺值;t
d0
'为发电机转子d轴励磁绕组定子开路时间常数,单位秒;tj为发电机转子惯性时间常数,单位秒,tj=2h;d为发电机等值阻尼系数,单位秒;kg饱和系数,a,b为发电机饱和系数;ψd,ψq为定子绕组磁链;e
fd
、p
t
为励磁绕组和原动机输入;eq’为转子q轴暂态电势;角速度ω的单位是以额定角速度2πf0,单位弧度/秒为基准的标幺值;f0为额定频率50hz。
[0019]
优选地,步骤二中,基于vsg的新能源调速系统辨识模型,主要包括量测环节、反馈环节以及惯性环节;基于vsg的新能源励磁系统辨识模型,可等值为具有励磁机的它励式励磁调节系统,主要包括量测环节、放大环节、励磁机、反馈环节。
[0020]
优选地,步骤三中,待辨识参数,包含发电机参数,时间常数和比例系数3个部分。发电机参数,涉及虚拟发电机d轴和q轴暂态参数,同步电抗xd和xq、暂态电抗xd′
和xq′
。时间常数,涉及虚拟发电机暂态开路时间常数t
d0
′
、发电机转子惯性时间常数tj,控制系统测量时延ts、通信时延t0,励磁系统放大环节ta、反馈环节tf、励磁机te。比例系数,涉及虚拟同步发电机饱和系数kg,控制系统量测环节放大倍数k
δ
、硬负反馈放大倍数ki,励磁系统放大环节时间常数ta、反馈环节时间常数tf、励磁机时间常数te。
[0021]
优选地,步骤四中,电压源型虚拟同步发电机辨识参数包括时间常数和放大倍数,通过k-means聚类算法确定电压源型虚拟同步发电机的辨识参数搜索空间,进行模型辨识。
[0022]
优选地,步骤五中,综合负荷模型包含感应电动机模型和综合静态负荷模型。
[0023]
所述感应电动机负荷模型为:
[0024]
[0025][0026][0027][0028]
tm=(aω2+bω+c)t0[0029]
aω
02
+bω0+c=1
[0030][0031]
其中,tj为转子惯性时间常数;tm、te分别为机械转矩、电磁转矩;em为暂态内电势;im为从电网吸收的电流;x’、x分别为暂态电抗、同步电抗;t
d0’为定子开路转子回路时间常数;u、i分别为感性电动机端电压和电流;r1为定子电阻;t0为额定机械转矩;r2为转子电阻;x1为定子电抗;x2转子电抗;xm为励磁电抗;a为阻力矩与转速平方相关的比例系数;b为阻力矩与转速相关的比例系数;c为与转速无关的比例系数;ω为电动机转子转速。
[0032]
所述静态负荷模型为:
[0033][0034]
其中,pz,pi,p
p
分别为有功功率恒阻抗系数、恒电流系数和有功功率恒功率系数,满足pz+pi+p
p
=1;qz,qi,q
p
分别为无功功率恒阻抗系数、恒电流系数和恒功率系数,满足qz+qi+q
p
=1;p0,q0,u0分别为有功功率、无功功率和电压初始值,由负荷界面上恒阻抗比例确定;p,q,u分别为负荷有功功率、无功功率和电压,可由历史样本数据获取。
[0035]
本发明的有益效果在于,与现有技术相比,
[0036]
1、新能源接入电力系统后呈现出同步发电机特性,且电力系统安全稳定分析中新能源评估往往参照同步发电机指标,本发明充分考虑这一特性,构建的基于虚拟同步发电机的新能源模型更好的契合了电力系统安全稳定分析需求。
[0037]
2、本发明方法充分考虑并网型、跟网型新能源的不同特性以及风机、光伏、储能等不同新能源类型,构建的模型更为精细,提高了电力系统安全稳定分析的准确性。
[0038]
3、本发明构建的平稳型电动机负荷辨识模型和冲击型电动机负荷辨识模型充分考虑电动机负荷运行特性,提高了仿真模型精度。
[0039]
4、本发明实现了新能源、电动机、负荷系统化建模,且模型计算量较小,易辨识,与实际需求更为适应,为电力系统安全稳定提供重要的参考依据。
附图说明
[0040]
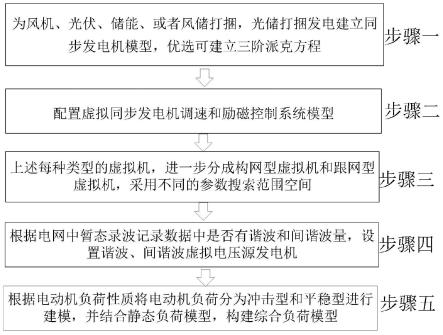
图1为本发明一种新能源发电和负荷混合模型辨识建模方法流程图;
[0041]
图2为本发明中一种新能源发电和负荷混合辨识模型示意图;
[0042]
图3为基于vsg的新能源调速系统辨识模型示意图;
[0043]
图4为基于vsg的新能源励磁系统辨识模型示意图。
具体实施方式
[0044]
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明的技术方案进行清楚、完整地描述。本技术所描述的实施例仅仅是本发明一部分的实施例,而不是全部实施例。基于本发明精神,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明的保护范围。
[0045]
一种新能源发电和负荷混合模型辨识建模方法,包括以下步骤:
[0046]
步骤一,基于新能源并网后呈现出的同步发电机特性及电力系统安全稳定分析基于三相工频的需求,为风机、光伏、储能、或者风储打捆,光储打捆发电建立虚拟同步发电机模型,优选可建立三阶park方程;
[0047]
基于vsg的新能源虚拟发电机辨识模型包括定子电压方程、转子电压方程、运动方程。
[0048]
新能源虚拟发电机辨识模型,考虑新能源在vsg技术下,经并网逆变器呈现出的同步发电机特性。新能源虚拟发电机辨识模型以park方程作为其数学模型,相较于以光伏阵列、变流器级有功控制模型建立光伏、储能发电系统数学模型和考虑转子回路电磁暂态过程和转子机械运动暂态过程的数学模型描述的风机模型,该模型在简化建模流程,提高仿真效率的同时,更能体现新能源并网后的外特性。在该模型辨识过程中,均采用在d轴和q轴下的电气参数。基于vsg的发电机转子暂态的电磁过程eq’电势变化的3阶模型,以三阶实用发电机模型构建新能源虚拟发电机辨识模型。构建的新能源虚拟发电机定子电压方程、转子电压方程、运动方程分别为:
[0049]
ud=x
q-i
q-rid[0050]
uq=eq'-xd'i
d-riq[0051][0052][0053][0054]
其中,u为绕组电压(v);i为绕组电流(a);r为绕组电阻(ω);xd为发电机d轴同步电抗,标幺值(p.u.);x
d’为发电机d轴暂态电抗,标幺值(p.u.);xq为发电机q轴同步电抗,标幺值(p.u.);t
d0
'为发电机转子d轴励磁绕组定子开路时间常数,单位秒;tj为发电机转子惯性时间常数,单位秒,tj=2h;d为发电机等值阻尼系数,单位秒;kg饱和系数,a,b为发电机饱和系数;ψd,ψq为定子绕组磁链;e
fd
、p
t
为励磁绕组和原动机输入;eq’为转子q轴暂态电势;角速度ω的单位是以额定角速度2πf0(弧度/秒)为基准的标幺值;f0为额定频率50hz。
[0055]
步骤二,为上述新能源发电机模型配置调速和励磁控制系统模型;
[0056]
基于vsg的新能源调速系统辨识模型,其输出具有类似于火电、水电机组的调速系统特性,主要包括量测环节、反馈环节以及惯性环节等。如图3所示,其传递函数主要由pi环节和一阶惯性环节构成。
[0057]
量测环节:量测环节采集新能源虚拟发电机的转速ω和目标转速ωr作为原始输入量,并比较目标转速值与实际转速值,将其偏差作为新能源调速系统辨识模型中间输入量;考虑测量元件测量量与实际物理量的线性关系,在量测环节引入量测环节放大系数k
δ
对中间输入量线性化处理,获取新能源调速系统辨识模型最终输入量。
[0058]
反馈环节:反馈环节可实现新能源虚拟发电机的闭环控制,进而实现实时控制。反馈环节将量测环节输出信息进行积分处理得到待调节比例δμ,并与调节比例μ0计算,确认调速后的新能源虚拟发电机的调节比例,经硬反馈放大倍数ki反馈至输入,从而实现闭环控制。其中,积分处理考虑量测环节时延ts;调节比例μ0=p
g0
/k
mh
,由发电机稳态电功率p
g0
系统标幺值和容量比k
mh
计算得到。
[0059]
惯性环节:惯性环节将反馈环节输出经容量比k
mh
处理作为输入条件。在新能源调速系统辨识模型中还需考虑由于风机风叶机械惯性和储能造成的光伏响应时滞、通信及稳定性要求的产生的时延,因此在调速模型以一阶惯性环节1/(1+st0)表征该特性,t0为其时间常数。其中,容量比k
mh
=ph/sb,ph为新能源虚拟同步发电机额定功率,sb为系统基准容量。
[0060]
经过上述3个环节,新能源调速系统辨识模型可调整原动机输出的机械功率,即发电机的输入功率p
t
,从而实现速度调节和发电机电功率调节。
[0061]
基于vsg的新能源励磁系统辨识模型,可等值为具有励磁机的它励式励磁调节系统,如图4所示,主要包括量测环节、放大环节、励磁机、反馈环节等。
[0062]
量测环节:量测环节采集新能源虚拟发电机的端电压v
t
和初始端电压v
t0
作为原始输入量,并比较初始电压值与实际电压值,其偏差经量测环节放大倍数kr和包含量测环节时延tr的一阶惯性环节计算得到量测环节输出量vr。
[0063]
放大环节:放大环节将量测环节输出量vr与系统稳定器输入控制量vs差值作为输入,经该环节放大倍数ka和时延ta计算,作为该环节输出量。放大环节包含一阶环节。
[0064]
励磁机:励磁机环节将励磁机原始输出电压e
fd0
与放大环节输出量差值作为输入量,由于励磁机本身的时延特性,以包含励磁机时间常数te的一阶惯性环节表征其物理特性。该环节可输出励磁机调节后的电压e
fd
。
[0065]
反馈环节:反馈环节包含反馈环节的方法倍数kf和反馈环节时间常数tf,同时采用并联校正,目的是改善系统的调节特性,输出稳定器输出控制量vf并反馈至放大环节,实现励磁系统闭环控制。
[0066]
步骤三,将步骤一和步骤二中构建的新能源虚拟同步发电机模型进一步分成构网型虚拟机和跟网型虚拟机,并采用不同的参数搜索范围空间对构网型风电、跟网型风电、构网型光伏、跟网型光伏、构网型储能、跟网型储能等不同类型新能源vsg模型差异化建模;
[0067]
由步骤一和步骤二中已确定的基于vsg的新能源模型,确定待辨识参数,主要包含发电机参数,时间常数和比例系数3个部分。发电机参数,涉及虚拟发电机d轴和q轴暂态参数,同步电抗xd和xq、暂态电抗xd′
和xq′
。时间常数,涉及虚拟发电机暂态开路时间常数t
d0
′
、发电机转子惯性时间常数tj,控制系统测量时延ts、通信时延t0,励磁系统放大环节ta、反馈环节tf、励磁机te。比例系数,涉及虚拟同步发电机饱和系数kg,控制系统量测环节放大倍数kδ
、硬负反馈放大倍数ki,励磁系统放大环节时间常数ta、反馈环节时间常数tf、励磁机时间常数te。
[0068]
通过k-means算法确认待辨识参数的参数搜索空间,进而形成涵盖构网型风电、跟网型风电、构网型光伏、跟网型光伏、构网型储能、跟网型储能的新能源发电机模型。
[0069]
通过对典型场景下新能源模型的仿真分析,获取并网型和跟网型发电机在典型场景下的辨识参数。采用k-means聚类算法对新能源发电机类型进行聚类,以数据点到该类集合中心质点距离为目标,进行迭代计算,把n个总场景聚类成l类新能源发电机类型集s。
[0070]
1)初始化,令迭代次数k=1。
[0071]
2)从n个场景集中随机抽取l个场景作为质心,ok={o
kj
∣1≤j≤l},o
kj
=(x
1,jk
,x
2,jk
,
…
,x
m,jk
),m为辨识参数总个数。
[0072]
3)分别计算剩余场景到每个质心的距离d
ijk
。
[0073][0074]
4)对比场景i到各个质心的距离,找到最短距离并记为d
ik
,并将该场景归类最短距离的质心下并计算聚类偏差值。
[0075][0076]
5)令迭代次数k=k+1,重复步骤2)-4),计算新聚类中心下的聚类结果。
[0077]
6)判断j
k-j
k-1
《ε收敛条件是否成立,若成立输出聚类结果并选取质心集o
k-1
为发电机类型数据集,s=o
k-1
。
[0078]
7)若不满足则重复步骤5)-6),直至输出新能源发电机类型数据集s。
[0079]
8)取数据集s中m项辨识参数的最小值和最大值,作为不同类型新能源发电机的辨识参数搜索范围。
[0080]
步骤四,根据电网中暂态录波记录数据中是否有谐波和间谐波量,设置谐波、间谐波电压源型虚拟发电机,以反映新能源中电力电子设备对电网安全稳定监视和控制信号的干扰。
[0081]
由故障录波装置可获取电力系统暂态录波记录数据,通过对录波数据的分析确定系统中是否有谐波或者间谐波,系统中的谐波和间谐波将导致vsg并网电流产生同次谐波,从而恶化并网电能质量,当谐波或间谐波存在时载入电压源型虚拟同步发电机模型。
[0082]
电压源型虚拟同步发电机可视为可控电压源,模型包括发电机模型和控制系统两个部分,其辨识模型如步骤一和步骤二所示。
[0083]
电压源型虚拟同步发电机辨识参数主要包括时间常数和放大倍数,可通过步骤三所述的k-means算法确定电压源型虚拟同步发电机的辨识参数搜索空间,进行模型辨识。
[0084]
步骤五,根据电动机负荷性质将电动机负荷分为冲击型和平稳型进行建模,并结合静态负荷模型,构建综合负荷模型。
[0085]
其中,综合负荷模型包含感应电动机模型和综合静态负荷模型两部分。感应电动机模型表征负荷的动态特征,根据负荷特性的不同,进一步,区分为冲击型和平稳型感应电动机负荷。综合静态负荷模型则可反映负荷的静态特征。
[0086]
冲击型电动机负荷辨识模型适用于电弧炼钢炉、轧钢机等冲击负荷,具有周期性
或非周期性,瞬时负荷量变化较大的特征。
[0087]
平稳型电动机负荷辨识模型适用于化工厂等负荷量较为稳定的负荷。
[0088]
感应电动机负荷模型采用三阶感应电动机数学模型,以其微分方程反映动态外特性。
[0089][0090][0091][0092][0093]
tm=(aω2+bω+c)t0[0094]
aω
02
+bω0+c=1
[0095][0096]
其中,tj为转子惯性时间常数;tm、te分别为机械转矩、电磁转矩;em为暂态内电势;im为从电网吸收的电流;x’、x分别为暂态电抗、同步电抗;t
d0’为定子开路转子回路时间常数;u、i分别为感性电动机端电压和电流;r1为定子电阻;t0为额定机械转矩;r2为转子电阻;x1为定子电抗;x2转子电抗;xm为励磁电抗;a为阻力矩与转速平方相关的比例系数;b为阻力矩与转速相关的比例系数;c为与转速无关的比例系数;ω为电动机转子转速。
[0097]
感应电动机的初始滑差、初始无功由有功负荷率m
lf
计算得出。m
lf
计算方法为:
[0098][0099]
其中,p
m0
为感应电动机初始有功功率;s
m0
为感应电动机容量;u
p0
为负荷母线初始电压。
[0100]
构建综合静态负荷模型,确定辨识模型参数。
[0101]
负荷静态特性是指当电压或频率变化缓慢时,负荷吸收的功率与电压或频率之间的关系。综合静态负荷模型以包含恒阻抗、恒电流、恒功率的多项式模型表征负荷静特性。该模型对于不同区域呈现出的负荷差异性具有良好的适应性,同时能满足安全稳定分析中的精度要求。
[0102][0103]
其中,pz,pi,p
p
分别为有功功率恒阻抗系数、恒电流系数和有功功率恒功率系数,满足pz+pi+p
p
=1;qz,qi,q
p
分别为无功功率恒阻抗系数、恒电流系数和恒功率系数,满足qz+qi+q
p
=1;p0,q0,u0分别为有功功率、无功功率和电压初始值,由负荷界面上恒阻抗比例确
定;p,q,u分别为负荷有功功率、无功功率和电压,可由历史样本数据获取。
[0104]
静态负荷模型中待辨识参数,主要涉及比例系数pz、pi、p
p
、qz、qi和q
p
。
[0105]
最后应当说明的是,以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1