一种具有绷紧功能的线缆牵引机
1.本发明涉及工业产品应用技术领域,更具体地说,本发明涉及一种具有绷紧功能的线缆牵引机。
背景技术:
2.随着5g技术的不断完善与大规模的使用,当5g技术非常成熟时将会大量的投入民用和商用,那么将会建设大量的5g基站,与此同时,也会铺设大量的光缆,此时光缆的放线扎线则成为一个严峻的问题。
3.目前市场上常见的通信光缆扎线方法有两种:一种是人工滑轮作业,另一种是人工附挂器。人工滑轮作业是指人坐在操作平台上,利用升降装置将人升到需要作业的高空位置处,当人工扎线完成后,利用滑轮前行到达下一个扎线点处再次进行人工扎线。所述方法存在以下缺点:(1)由于扎线工程量较大,需要耗费大量人力;(2)进行作业时需要上升到高空处,非常危险,存在安全隐患;(3)每次扎线的程度由人工手工操作决定,扎线质量不稳定;(4)从本次扎线点到达下一个扎线点需要人力依靠滑轮前行,扎线效率低,劳动强度大。
4.人工附挂器是指人工利用长为8米左右的工具杆将附挂器托举到高空光缆处,通过无线按钮进行控制附挂器实现对通信光缆扎线作业,所述方法存在以下缺点:(1)由于每次扎线都需要人力进行托举,需要耗费大量人力;(2)附挂器重量较大,人力将其托举到高空进行作业,效率较为低下。
5.目前市场上常见的通信光缆放线方法是人工放置,即利用升降装置将工作人员升至需要作业的高空位置处,进行人工放线,所述方法存在以下缺点:(1)由于放线工程量较大,需要耗费大量人力;(2)进行作业时需要上升到高空处,存在安全隐患;(3)放线效率较低。
6.又由于光缆放线和挂线时常将新光缆复挂在先前已存在的主光缆上,因此新挂光缆在复挂过程中常会遇到先前主光缆上的捆扎丝等障碍物,所以光缆全自动放线扎线装置不仅需要具备在光缆线上稳定行驶能力,还需具备跨越障碍物的功能。同时,现有技术中,都没有将线缆绷直扎线的功能,会导致线缆弯曲、折弯等麻烦。上述传统放线和扎线方法显然不能很好的解决自身具有的缺陷和新遇到技术问题。因此本发明提供了一种具有绷紧功能的线缆牵引机,即能够自动在光缆上匀速行驶扎线,也具有遇光缆上各种障碍物实现跨障行驶能力,同时可以将线缆绷直,避免线缆松垮。
技术实现要素:
7.为了克服上述缺陷,本发明提供一种具有绷紧功能的线缆牵引机,具体采用如下
的技术方案:一种具有绷紧功能的线缆牵引机,包括:主体件,所述主体件包括控制箱、控制器、电池和探测器,所述控制器和所述电池均设置在所述控制箱上,所述探测器与所述控制器电连接;翻越件,其设置在所述主体件上,所述翻越件包括第一翻越件、第二翻越件和第三翻越件,所述第一翻越件、所述第二翻越件和所述第三翻越件均设置在所述控制箱上;扎线件,其设置在所述主体件上,所述扎线件包括前端扎线件和后端扎线件,所述前端扎线件和所述后端扎线件均设置在所述控制箱上;其中:所述探测器能够探测行驶前方的障碍物,所述控制器能够根据所述探测器探测的实时信息及时控制所述第一翻越件、所述第二翻越件和所述第三翻越件逐个实现跨越障碍物,并且控制所述前端扎线件和所述后端扎线件实施避障和扎线。
8.优选地,所述控制器分别与所述电池、所述翻越件和所述扎线件电连接;所述探测器包括超声波距离传感器和红外测距传感器,所述超声波距离传感器和所述红外测距传感器均设置在所述翻越件上,所述超声波距离传感器和所述红外测距传感器均与所述控制器电连接。
9.优选地,所述第一翻越件包括爬行固定架、横向偏转件和竖向升降爬行件,所述爬行固定架设置在所述控制箱上,所述横向偏转件设置在所述爬行固定架上,所述竖向升降爬行件设置在所述横向偏转件上。
10.优选地,所述横向偏转件包括蜗轮轴、蜗轮、齿轮箱、偏转电机和蜗杆,所述蜗轮轴设置在所述爬行固定架上,所述蜗轮设置在所述蜗轮轴上,所述齿轮箱设置在所述蜗轮上,所述偏转电机设置在所述齿轮箱上,所述蜗杆设置在所述偏转电机上;所述蜗轮轴一端水平固定设置在所述爬行固定架上,所述蜗轮固定套装在所述蜗轮轴上,所述齿轮箱套在所述蜗轮外,所述蜗杆设置在所述偏转电机转轴上,并且所述蜗杆与所述蜗轮啮合。
11.优选地,所述竖向升降爬行件包括第一电动推杆、上平台、固定支架、爬行电机和爬行轮,所述第一电动推杆设置在所述齿轮箱上,所述上平台设置在所述第一电动推杆上,所述固定支架设置在所述上平台上,所述爬行电机设置在所述固定支架上,所述爬行轮设置在所述爬行电机上;所述第一电动推杆设置在所述齿轮箱上表面;所述上平台设置在所述第一电动推杆顶端,所述固定支架设置在所述上平台上,所述固定支架上设置有旋转贯穿孔;所述爬行电机固定设置在所述固定支架上,并且所述爬行电机转轴穿过所述旋转贯穿孔,所述爬行轮固定套装在所述爬行电机转轴上。
12.优选地,所述第二翻越件与所述第一翻越件结构相同;所述第二翻越件设置在所述控制箱上;所述第三翻越件与所述第一翻越件结构相同;所述第三翻越件位于所述第一翻越件和所述第二翻越件之间。
13.优选地,所述前端扎线件包括竖向转动件、纵向伸缩件和升降扎线件,所述竖向转动件设置在所述控制箱上,所述纵向伸缩件设置在所述竖向转动件上,所述升降扎线件设置在所述纵向伸缩件上。
14.优选地,所述竖向转动件包括转动支撑架、第二电动推杆、前端支撑板和中继杆,所述转动支撑架和所述前端支撑板均设置在所述控制箱上,所述第二电动推杆设置在所述转动支撑架上,所述中继杆设置在所述前端支撑板上;所述转动支撑架设置在所述控制箱
上,所述第二电动推杆水平固定设置在所述转动支撑架上;所述前端支撑板一端铰接在所述控制箱上,所述中继杆一端垂直固定设置在所述前端支撑板上,所述中继杆另一端铰接在所述第二电动推杆顶端上。
15.优选地,所述纵向伸缩件包括第三电动推杆和滑动支撑架,所述第三电动推杆设置在所述前端支撑板上,所述滑动支撑架设置在所述第三电动推杆上;所述第三电动推杆水平固定设置在所述前端支撑板上;所述滑动支撑架设置在所述第三电动推杆顶端,并且所述滑动支撑架贴在所述前端支撑板上;所述升降扎线件包括第四电动推杆和第一附挂机,所述第四电动推杆底端竖直固定设置在所述滑动支撑架上,所述第一附挂机设置在所述第四电动推杆顶端上,所述第四电动推杆和所述第一附挂机均与所述控制器电连接;其中,所述滑动支撑架上还设置有一用于夹紧所述主光缆的升降夹线机构,该升降夹线机构位于所述第一附挂机的前端。
16.优选地,所述后端扎线件包括第五电动推杆和第二附挂机,所述第五电动推杆设置在所述控制箱上,所述第二附挂机设置在所述第五电动推杆顶端上,所述第五电动推杆和所述第二附挂机均与所述控制器电连接。
17.本发明至少包括以下有益效果:1)本发明具有绷紧功能的线缆牵引机自动化程度高、扎线效率高、扎线质量稳定,使用可靠性高,能够自动跨越障碍物;2)本发明具有绷紧功能的线缆牵引机设置了主体件、翻越件和扎线件,所述主体件包括控制器和探测器,所述翻越件包括第一翻越件、第二翻越件和第三翻越件,所述扎线件包括前端扎线件和后端扎线件,所述探测器能够探测行驶前方的障碍物,所述控制器能够根据所述探测器探测的实时信息及时控制所述第一翻越件、所述第二翻越件和所述第三翻越件逐个实现跨越障碍物,并且控制所述前端扎线件和所述后端扎线件实施避障和扎线,同时能够根据需要自动调整前端扎线件和后端扎线件间距,进而自动调整同时扎线间距;最终有效提高了自动化程度、扎线效率、扎线质量稳定性和使用可靠性。
18.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
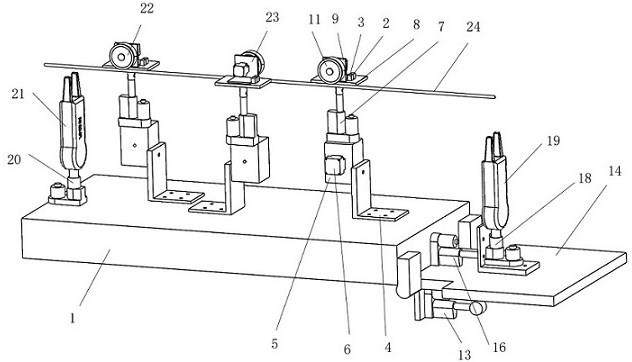
19.图1为本发明具有绷紧功能的线缆牵引机主视图;图2为本发明具有绷紧功能的线缆牵引机俯视图;图3为本发明具有绷紧功能的线缆牵引机前端立体结构示意图;图4为本发明具有绷紧功能的线缆牵引机后端立体结构示意图;图5为本发明具有绷紧功能的线缆牵引机后侧仰视立体结构示意图。
20.其中:1-控制箱,2-超声波距离传感器,3-红外测距传感器,4-爬行固定架,5-齿轮箱,6-偏转电机,7-第一电动推杆,8-上平台,9-固定支架,10-爬行电机,11-爬行轮,12-转动支撑架,13-第二电动推杆,14-前端支撑板,15-中继杆,16-第三电动推杆,17-滑动支撑架,18-第四电动推杆,19-第一附挂机,20-第五电动推杆,21-第二附挂机,22-第二翻越件,23-第三翻越件,24-主光缆。
具体实施方式
21.以下将参照附图,通过实施例方式详细地描述本发明的技术方案。在此需要说明的是,对于这些实施例方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
22.本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,单独存在b,同时存在a和b三种情况,本文中术语“/和”是描述另一种关联对象关系,表示可以存在两种关系,例如,a/和b,可以表示:单独存在a,单独存在a和b两种情况,另外,本文中字符“/”,一般表示前后关联对象是一种“或”关系。
23.根据图1-图5所示,一种具有绷紧功能的线缆牵引机,包括主体件、翻越件和扎线件,所述翻越件和所述扎线件均设置在所述主体件上。所述主体件包括控制箱1、控制器、电池和探测器,所述控制器和所述电池均设置在所述控制箱1上,所述探测器设置在所述翻越件上。所述控制器分别与所述电池、所述探测器、所述翻越件和所述扎线件电连接。所述探测器包括超声波距离传感器2和红外测距传感器3,所述超声波距离传感器2和所述红外测距传感器3均设置在所述翻越件上,所述超声波距离传感器2和所述红外测距传感器3能够同时对前方障碍物实施探测和测距,所述超声波距离传感器2和所述红外测距传感器3均与所述控制器电连接。由于超声波距离传感器2探测范围较大,能够及时发现悬挂在先前主光缆24上的塑料袋等随风摇摆不定的较大体型障碍物,并且测得随风摇摆障碍物距离所述具有绷紧功能的线缆牵引机大致距离。所述红外测距传感器3能够实时探测行驶前方一根光束范围内障碍物距离。通过所述超声波距离传感器2和所述红外测距传感器3相互配合能够精准测得至障碍物距离,使所述翻越件能够精准实施爬行越障动作,以提高所述具有绷紧功能的线缆牵引机运行可靠性和爬行越障效率。
24.所述翻越件包括第一翻越件、第二翻越件22和第三翻越件23,所述第一翻越件、所述第二翻越件22和所述第三翻越件23均设置在所述控制箱1上。所述第一翻越件包括爬行固定架4、横向偏转件和竖向升降爬行件,所述爬行固定架4设置在所述控制箱1上,所述横向偏转件设置在所述爬行固定架4上,所述竖向升降爬行件设置在所述横向偏转件上。所述爬行固定架4呈直角板状,所述爬行固定架4一直角面固定设置在所述控制箱1前端上表面上。
25.所述横向偏转件包括蜗轮轴、蜗轮、齿轮箱5、偏转电机6和蜗杆,所述蜗轮轴设置在所述爬行固定架4上,所述蜗轮设置在所述蜗轮轴上,所述齿轮箱5设置在所述蜗轮上,所述偏转电机6设置在所述齿轮箱5上,所述蜗杆设置在所述偏转电机6上。所述偏转电机6为步进电机,所述蜗轮轴一端水平固定设置在所述爬行固定架4另一直角面上,所述蜗轮固定套装在所述蜗轮轴上,所述齿轮箱5套在所述蜗轮外,所述蜗杆设置在所述偏转电机6转轴上,并且所述蜗杆与所述蜗轮啮合。由于蜗轮通过所述蜗轮轴固定设置在所述爬行固定架4上,并且所述蜗杆与所述蜗轮啮合,当偏转电机6带动所述蜗杆转动时,所述蜗杆将围绕蜗轮周向转动,进而使固定在所述横向偏转件上的所述竖向升降爬行件围绕所述蜗轮轴转动,最终实现横向偏转越障目的。
26.所述竖向升降爬行件包括第一电动推杆7、上平台8、固定支架9、爬行电机10和爬行轮11,所述第一电动推杆7设置在所述齿轮箱5上,所述上平台8设置在所述第一电动推杆7上,所述固定支架9设置在所述上平台8上,所述爬行电机10设置在所述固定支架9上,所述
爬行轮11设置在所述爬行电机10上。所述第一电动推杆7竖直固定设置在所述齿轮箱5上表面,并且所述第一电动推杆7与所述控制器电连接。所述上平台8水平固定设置在所述第一电动推杆7顶端,并且所述上平台8前端用于固定安装所述超声波距离传感器2和所述红外测距传感器3。所述固定支架9呈直角板状,所述固定支架9一直角面水平固定设置在所述上平台8上,所述固定支架9另一直角面上设置有旋转贯穿孔。所述爬行电机10固定设置在所述固定支架9另一直角面上,并且所述爬行电机10转轴穿过所述旋转贯穿孔,所述爬行轮11固定套装在所述爬行电机10转轴上,并且随所述爬行电机10转动而转动。所述爬行轮11用于扣置在所述主光缆24上,并且在主光缆24上行驶。
27.所述第二翻越件22与所述第一翻越件结构相同。所述第二翻越件22设置在所述控制箱1后端上表面上,并且所述第二翻越件22的所述爬行轮11与所述第一翻越件的所述爬行轮11在同一平面上。所述第三翻越件23与所述第一翻越件结构相同。所述第三翻越件23位于所述第一翻越件和所述第二翻越件22之间,并且所述第三翻越件23朝向与所述第一翻越件朝向相反,同时所述第三翻越件23的所述爬行轮11与所述第一翻越件的所述爬行轮11和所述第二翻越件22的所述爬行轮11同时在一平面上。使得所述具有绷紧功能的线缆牵引机在主光缆24上受到横行风吹横向摆动时任然能够牢固扣置在主光缆24上。
28.所述扎线件包括前端扎线件和后端扎线件,所述前端扎线件和所述后端扎线件均设置在所述控制箱1上。所述前端扎线件包括竖向转动件、纵向伸缩件和升降扎线件,所述竖向转动件设置在所述控制箱1上,所述纵向伸缩件设置在所述竖向转动件上,所述升降扎线件设置在所述纵向伸缩件上。所述竖向转动件包括转动支撑架12、第二电动推杆13、前端支撑板14和中继杆15,所述转动支撑架12和所述前端支撑板14均设置在所述控制箱1上,所述第二电动推杆13设置在所述转动支撑架12上,所述中继杆15设置在所述前端支撑板14上。所述转动支撑架12呈直角板状,所述转动支撑架12一直角面固定设置在所述控制箱1前端下表面上,所述第二电动推杆13水平固定设置在所述转动支撑架12另一直角面上,所述第二电动推杆13与所述控制器电连接。所述前端支撑板14一端水平铰接在所述控制箱1前端面上,所述中继杆15一端垂直固定设置在所述前端支撑板14下表面上,所述中继杆15另一端铰接在所述第二电动推杆13顶端上。当所述第二电动推杆13伸长预定长度时能够通过所述中继杆15推动所述前端支撑板14围绕交接点转动,使所述前端支撑板14与所述控制箱1平行,当所述第二电动推杆13收缩预定长度时能够通过所述中继杆15拉动所述前端支撑板14围绕交接点向下转动,进而带动所述升降扎线件向下转动越障。
29.所述纵向伸缩件包括第三电动推杆16和滑动支撑架17,所述第三电动推杆16设置在所述前端支撑板14上,所述滑动支撑架17设置在所述第三电动推杆16上。所述第三电动推杆16与所述控制器电连接,所述第三电动推杆16水平固定设置在所述前端支撑板14上。所述滑动支撑架17呈直角板状,所述滑动支撑架17一直角面固定设置在所述第三电动推杆16顶端,所述滑动支撑架17另一直角面贴在所述前端支撑板14上。当第三电动推杆16伸长和收缩时能够带动所述滑动支撑架17沿纵向滑动,进而改变两个附挂机扎线间距。所述升降扎线件包括第四电动推杆18和第一附挂机19,所述第四电动推杆18底端竖直固定设置在所述滑动支撑架17另一直角面上,所述第一附挂机19设置在所述第四电动推杆18顶端上,所述第四电动推杆18和所述第一附挂机19均与所述控制器电连接。所述后端扎线件包括第五电动推杆20和第二附挂机21,所述第五电动推杆20设置在所述控制箱1后端上表面上,所
述第二附挂机21设置在所述第五电动推杆20顶端上,所述第五电动推杆20和所述第二附挂机21均与所述控制器电连接。
30.放线是扎线的特例,即在需要放线的两端分别进行扎线操作即可实现放线功能。
31.所述具有绷紧功能的线缆牵引机在主光缆上的行驶和越障过程为:1)工作人员将所述第一翻越件、所述第二翻越件22和所述第三翻越件23的所述爬行轮11均扣置在主光缆24上,并且确认所述控制箱1前端朝向行驶方向;2)启动所述具有绷紧功能的线缆牵引机行驶,所述控制器按照预定程序控制所述第一翻越件、所述第二翻越件22和所述第三翻越件23在主光缆24上行驶;3)当探测器探测到前方障碍物为小型障碍物时,并且探测到行驶至前方障碍物距离达到预定距离时,所述控制器将控制所述第一翻越件的所述竖向升降件升高至预定高度,以跨越小型障碍物;待所述第一翻越件越过小型障碍物后,所述第二翻越件22上的探测器探测到行至障碍物距离达到预定距离时,控制器将控制所述第二翻越件22上的所述竖向升降件升高至预定高度,以跨越小型障碍物;待所述第二翻越件22越过小型障碍物后,所述第三翻越件23亦如此跨越小型障碍物;当探测器探测到前方障碍物为大型障碍物时,并且探测到行驶至前方障碍物距离达到预定距离时,所述控制器将控制所述第一翻越件的所述竖向升降件升高至预定高度,并且控制所述横向偏转件横向转动预定角度,以跨越大型障碍物;待所述第一翻越件越过大型障碍物后,所述第二翻越件22上的探测器探测到行至障碍物距离达到预定距离时,控制器将控制所述第二翻越件22上的所述竖向升降件升高至预定高度,并且控制所述横向偏转件横向转动预定角度,以跨越大型障碍物;待所述第二翻越件22越过大型障碍物后,所述第三翻越件23亦如此跨越大型障碍物;当探测器探测到所述第一附挂机19和所述第二附挂机21至障碍物距离达到预定距离时将启动所述第四电动推杆18和所述第五电动推杆20收缩进而使所述所述第一附挂机19和所述第二附挂机21降低高度实现越障目的。
32.为了将两端扎线点之间的主光缆24绷紧,避免主光缆24曲折,可以在滑动支撑架17上设置有一用于夹紧所述主光缆24的升降夹线机构,该升降夹线机构位于所述第一附挂机19的前端,在扎线前,控制升降夹线机构上升至主光缆24水平两端,随后将主光缆24夹紧,控制第三电动推杆16向前推动,直到主光缆24绷紧,随后控制两端的附挂机进行扎线,扎线结束后升降夹线机构复位,等待下一次扎线过程。
33.本发明设置的升降夹线机构可以在每次扎线前,将线缆绷直,绷直后再进行扎线,有效避免了线缆松垮、弯曲而引起不必要的麻烦。
34.由上所述,本发明具有绷紧功能的线缆牵引机自动化程度高、扎线效率高、扎线质量稳定,使用可靠性高,能够自动跨越障碍物;本发明具有绷紧功能的线缆牵引机设置了主体件、翻越件和扎线件,所述主体件包括控制器和探测器,所述翻越件包括第一翻越件、第二翻越件22和第三翻越件23,所述扎线件包括前端扎线件和后端扎线件,所述探测器能够探测行驶前方的障碍物,所述控制器能够根据所述探测器探测的实时信息及时控制所述第一翻越件、所述第二翻越件22和所述第三翻越件23逐个实现跨越障碍物,并且控制所述前端扎线件和所述后端扎线件实施避障和扎线,同时能够根据需要自动调整前端扎线件和后端扎线件间距,进而自动调整同时扎线间距;最终有效提高了自动化程度、扎线效率、扎线
质量稳定性和使用可靠性。
35.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1