一种双向对准的无人机协同自主无线充电方法
本技术涉及无人机协同自主无线充电,尤其是一种双向对准的无人机协同自主无线充电方法。
背景技术:
1、无线充电技术,源于无线电能传输技术,可分为小功率无线充电和大功率无线充电两种方式,小功率无线充电常采用电磁感应式,如对手机充电的qi方式,但中兴的电动汽车无线充电方式采用感应式,大功率无线充电常采用谐振式(大部分电动汽车充电采用此方式)由供电设备(充电器)将能量传送至用电的装置,该装置使用接收到的能量对电池充电,并同时供其本身运作之用。
2、现有无人机自主充电方式大多采用二维码实现引导降落,导致降落精度低(厘米级精度),难以满足低成本的电磁感应式无线充电的毫米级的高精度对准要求,大大降低了充电效率;所采用的充电平台为固定平台,存在应用场景严重受限,无法基于移动平台实现对区域内无人机进行充电维护。因此,针对上述问题提出一种双向对准的无人机协同自主无线充电方法。
技术实现思路
1、在本实施例中提供了一种双向对准的无人机协同自主无线充电方法用于解决现有无人机自主充电方式大多采用二维码实现引导降落,导致降落精度低(厘米级精度),难以满足低成本的电磁感应式无线充电的毫米级的高精度对准要求,大大降低了充电效率;所采用的充电平台为固定平台,存在应用场景严重受限,无法基于移动平台实现对区域内无人机进行充电维护的问题。
2、根据本技术的一个方面,提供了一种双向对准的无人机协同自主无线充电方法,所述无线充电方法包括如下步骤:
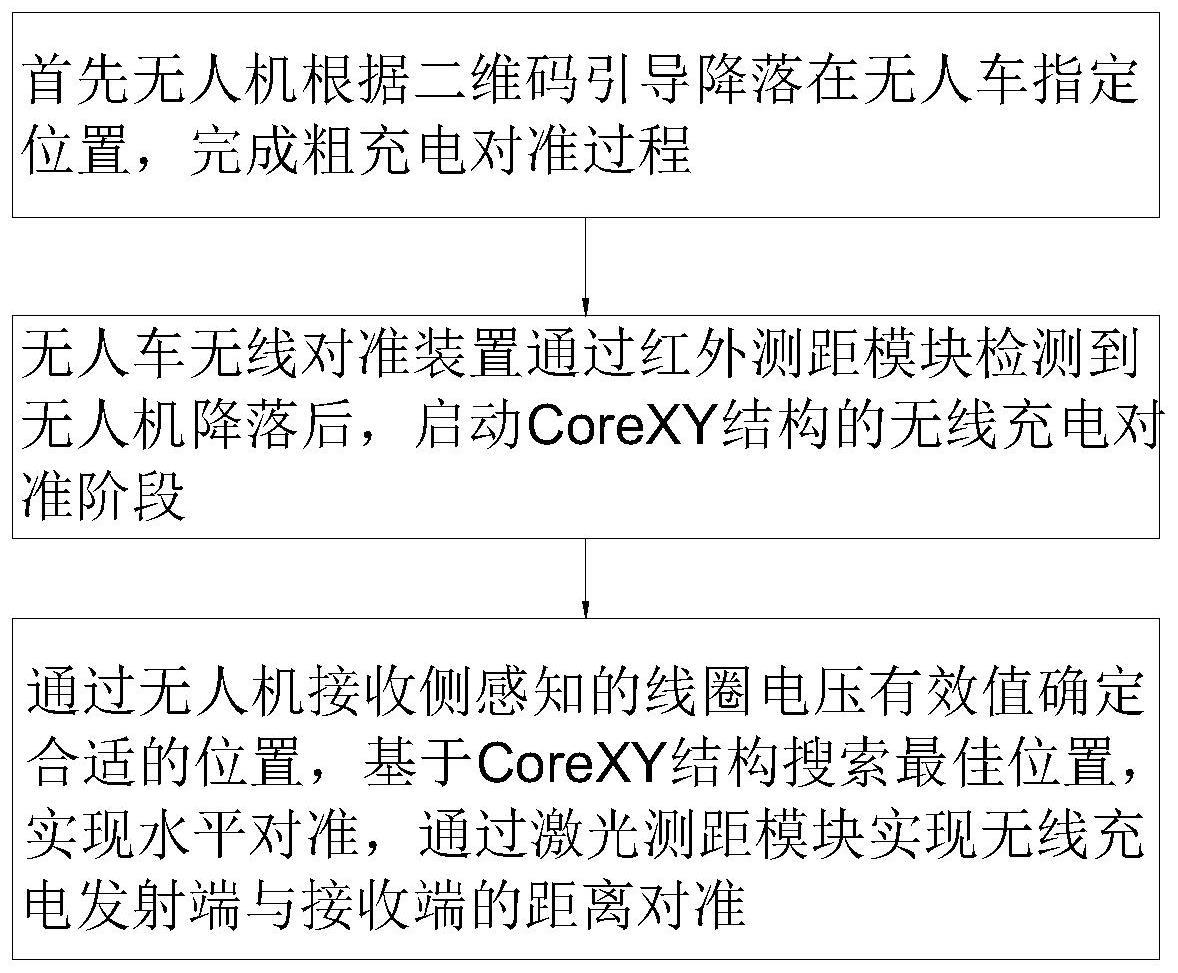
3、(1)首先无人机根据二维码引导降落在无人车指定位置,完成粗充电对准过程;
4、(2)无人车无线对准装置通过红外测距模块检测到无人机降落后,启动corexy结构的无线充电对准阶段;
5、(3)通过无人机接收侧感知的线圈电压有效值确定合适的位置,基于corexy结构搜索最佳位置,实现水平对准,通过激光测距模块实现无线充电发射端与接收端的距离对准。
6、进一步地,所述步骤(2)中对准阶段包括无人车充电平台配有两个独立式电机,通过电机操控无人车上的无线充电线圈的移动,当无人车通过红外装置模块检测到无人机平稳降落在指定位置时,无人车启动corexy结构,corexy结构是基于某物体(或平台)通过自身的电机运作,让该物体(或平台)在二维平面进行移动的一种操作形式,无人机通过扫描无人车二维码与无人车车载的无线充电线圈进行粗校对并进行降落,当无人车启动corexy时,车载计算机判断无人机电池线圈中轴线与无人车车载无线充电器的中轴线是否重合,当系统判定两线圈中轴线重合时,无人车开始执行充电操作;当系统判定二者中轴线并未重合时,无人车对车载充电线圈的水平位置进行校正,车载计算机通过操控无人车的驱动电机使得无线充电器与无人机电池线圈位置相匹配,以保障无人机充电成功。
7、进一步地,所述corexy工作原理如下:转机驱动控制该无线充电器在二维平面内进行移动与调整,当一个电机旋转,另一个停止的时候,移动平台沿着±y=±x的方向移动;当两个电机同向旋转的时候,移动平台沿着±x的方向移动;当两个电机反向旋转的时候,移动平台沿着±y的方向移动
8、进一步地,所述驱动电机数目为两个,分别为f1、f2,f1与f2驱动相互协作以控制该无线充电器在二维平面内进行移动与调整。
9、进一步地,所述步骤(3)的搜索方法首先通过网格搜索法,根据无人机接收端电压有效值随着水平距离减小而增加,根据预先确定的网格,寻找有效值最大且8个相邻的顶点(处于同一个网格中),为了提高搜索速度,网格可以设置的比较大,例如2cm*2cm大小的网格;然后基于模糊增量式pid的精细对准方法,然后选择两输入、三输出的模糊逻辑控制结构,模糊输入为电压偏差e和偏差变化率ec,模糊输出为δkp、δki和δkd,对pid控制参数进行实时调整,调整规则为:
10、kp=kp1+δkp (4)
11、ki=ki1+δki (5)
12、kd=kd1+δkd (6)
13、式中,kp1、ki1和kd1为pid控制的初始参数值,kp、ki和kd为调整后的参数值。
14、最后x和y步进电机交替控制pwm值为
15、pwm+=kp[e(k)-e(k-1)]+ki*e(k)+kd[e(k)-2e(k-1)+e(k-2)]
16、其中:
17、e(k):本次偏差e(k)=volt_target–volt_drone
18、e(k-1):上一次的偏差
19、e(k-2):上上次的偏差
20、kp:比例项参数
21、ki:积分项参数
22、kd:微分项参数
23、pwm:代表增量输出。
24、进一步地,所述pid模糊算法,指的是以误差值和误差变化作为输入值,利用其模糊规则进行推算,得到误差更小的操作,是一种智能推理的算法,虽然称之为模糊算法其实并不模糊,实际上是一种逐步求精的思想。
25、进一步地,所述pid模糊算法的具体操作首先测量元件将感应得到的电压数据传输给计算机,计算机将输入的结果对应到标准化的数值区间,并根据量化结果和模糊化子集得到该输入对子集的隶属度。之后确定e(电压偏差)和ec(偏差变化率)的模糊子集,对于pid控制我们选则:负大[nb]、负中[nm]、负小[ns]、零[zo]、正小[ps]、正中[pm]、正大[pb]等7个语言变量,这七个语言变量就能够有足够精度表达其模糊子集。所以我们定义e和ec的模糊子集均为{nb,nm,ns,zo,ps,pm,pb},然后引入量化函数。要确定量化函数,我们先引入e和ec模糊集对应的论域,定义为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。对于任何一个物理量测量信号都有一个量程范围,我们记为vmax和vmin,和在pid调节时设定值的范围预期相同,所以偏差e的范围就是vmin-vmax到vmax-vmin的范围内,而偏差的增量范围则是其两倍,我们采用线性方式量化,得到其函数关系为:
26、
27、
28、pid控制器中,kp值的选取决定于系统的响应速度。增大kp能提高响应速度,减小稳态偏差;但是,kp值过大会产生较大的超调,甚至使系统不稳定减小kp可以减小超调,提高稳定性,但kp过小会减慢响应速度,延长调节时间。因此,调节初期应适当取较大的kp值以提高响应速度,而在调节中期,kp则取较小值,以使系统具有较小的超调并保证一定的响应速度;而在调节过程后期再将kp值调到较大值来减小静差,提高控制精度,在系统中引入一个有效的早期修正信号,从而加快响应速度,减少调整时间,消除振荡,最终改变系统的动态性能,因此,kd值的选取对调节动态特性影响很大,kd值过大,调节过程制动就会超前,致使调节时间过长;kd值过小,调节过程制动就会落后,从而导致超调增加,在经过模糊化处理以及后期计算机解模糊后,计算机将处理的数据结果以电流的形式反馈给无线充电器的转动马达,再次进行微型调整,使得无线充电器能够精确对准无人机机载电池的线圈,保证无人机能够获得准确与稳定的电压供给。
29、进一步地,所述用推理方式推导出本发明的优点设发射端(无人车无线充电侧)的线圈为n1匝,线圈半径为r1;接收端(无人机侧)的线圈为n2匝,线圈半径为r2,两线圈之间的距离为d。假设两线圈垂直于中心的连线放置。线圈1通交流电后,线圈2产生的有效值∈为:
30、
31、其中:
32、ω为充电频率
33、im为充电电流
34、u0为磁常数为4π×10-7v·s/(a·m)
35、z为两线圈中心水平偏移量
36、线圈1为30匝,线圈2为20匝;
37、半径r1为20mm,r2为10mm;
38、充电电流为6a,频率为1mhz;水平距离0~20mm
39、垂直距离0~20mm得到水平距离、垂直距离与电压有效值之间的关系。
40、进一步地,所述无线充电器是利用电磁感应原理进行充电的设备,其原理和变压器相似,通过在发送和接收端各安置一个线圈,发送端线圈在电力的作用下向外界发出电磁信号,接收端线圈收到电磁信号并且将电磁信号转变为电流,从而达到无线充电的目的。
41、进一步地,所述无人车又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车,依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
42、通过本技术上述实施例,提供双向对准方法实现无线充电发射端与接收端精细对准,解决了现有无人机自主充电方式大多采用二维码实现引导降落,导致降落精度低(厘米级精度),难以满足低成本的电磁感应式无线充电的毫米级的高精度对准要求,大大降低了充电效率;所采用的充电平台为固定平台,存在应用场景严重受限,无法基于移动平台实现对区域内无人机进行充电维护的问题。
- 还没有人留言评论。精彩留言会获得点赞!