基于坐标变换抑制转矩脉动的电励磁双凸极电机控制方法
1.本技术涉及电励磁双凸极电机领域,尤其是一种基于坐标变换抑制转矩脉动的电励磁双凸极电机控制方法。
背景技术:
2.电励磁双凸极电机(dsem)是一种新型特种电机,其电机转子上无绕组和永磁体,具有结构简单、控制灵活、容错性能好、适用恶劣工况的优点,在航空、风力发电、新能源汽车等领域有很好的应用前景。但是,由于电励磁双凸极电机定转子双边凸极结构,导致其存在转矩脉动大、噪声大的问题,而转矩脉动的降低是电机平稳运行所要考虑的重要方面,因此研究电励磁双凸极电机转矩脉动的抑制具有重要的意义。
3.目前针对电励磁双凸极电机主要采用基于角度位置的转速电流或者转速转矩双闭环控制结构,在电流闭环或者转矩闭环中结合提前、滞后角度控制策略减小转矩脉动。王寅等公开的“一种三相双凸极无刷直流电机的控制方法及其驱动系统”(中国,授权日:2018年9年24日,授权号:cn105790651b)提出了一种根据励磁电流方向,转子旋转方向设置提前换相角,滞后关断角的双凸极电机控制方法,提高了双凸极电机的输出功率和工作效率,但其增加了多个导通状态,增加了控制的复杂性,且没有给出提前换相角及滞后关断角的选取方法,实施困难。张卓然等公开的“一种用于电励磁双凸极电机的转矩控制方法”(中国,公开日:2019年3月8日,公开号:cn109450330a)提出一种基于转速转矩双闭环控制结构,能够直接对转矩闭环控制,但是在状态切换过程后由于相电流的续流,仍然存在较大的换相转矩脉动。叶赛等公开的“基于转矩闭环抑制转矩脉动的电励磁双凸极电机控制方法”(中国,授权日:2021年12月17日,授权号cn113411014b)采取转矩闭环替代电流闭环,可以有效抑制换相和非换相转矩脉动,控制结构相对简单,然而转矩信号的测量和获取较为复杂且需要转矩传感器,增加硬件成本。已发表的论文《双凸极无刷直流电机三相九拍控制策略研究》(中国电机工程学报2016.36(10)),该文介绍了一种“三相九拍”控制策略,得到不同转速和转矩下三相九状态控制的开关管优化导通逻辑和提前角参数,但其控制角度选取与电机参数、负载及转速多个物理量有关,需要反复调试。电励磁双凸极电机采用上述所提出的转速电流或者转速转矩双闭环转矩脉动抑制方法时,均加入了角度控制策略,但是存在换相提前滞后角度难以确定,控制策略实施较为困难的问题。
4.申请内容
5.本发明人针对上述问题及技术需求,提出了一种基于坐标变换抑制转矩脉动的电励磁双凸极电机控制方法,本技术的技术方案如下:
6.一种基于坐标变换抑制转矩脉动的电励磁双凸极电机控制方法,该方法包括:
7.确定电励磁双凸极电机在极坐标系下的励磁转矩公式,极坐标系下的励磁转矩公式反映励磁转矩te与合成电流矢量is和合成磁链变化率矢量之间的关系,ψs是合成磁链,θ是位置信号;
8.根据电励磁双凸极电机在abc坐标系下的三相互感磁链对位置信号的偏导确定合成磁链变化率矢量的幅值和相角η;
9.基于极坐标系下的励磁转矩公式根据合成磁链变化率矢量的相角η确定使得转矩电流比最大的合成电流矢量is的相角δ,并根据励磁转矩的给定值te
*
以及合成磁链变化率矢量的幅值确定合成电流矢量is的幅值|is|;
10.将极坐标系下的合成电流矢量is的幅值|is|和相角δ转换得到abc坐标系下的三相电流给定值;
11.利用电流调节器控制电励磁双凸极电机的三相电流实际值跟随三相电流给定值。
12.其进一步的技术方案为,电励磁双凸极电机在极坐标系下的励磁转矩公式为
13.其进一步的技术方案为,确定合成电流矢量is的幅值和相角的方法包括:
14.确定使得转矩电流比最大的合成电流矢量is的相角δ等于合成磁链变化率矢量的相角η;
15.确定合成电流矢量is的幅值
16.其进一步的技术方案为,励磁转矩的给定值te
*
由电励磁双凸极电机的转速给定值n
*
和转速实际值n的差值经过转速调节器输出得到。
17.其进一步的技术方案为,确定电励磁双凸极电机在极坐标系下的励磁转矩公式的方法包括:
18.将电励磁双凸极电机在abc坐标系下的励磁转矩公式变换至αβγ坐标系得到其中,i
(αβγ)
=c
·i(abc)
,ψ
(αβγ)
=c
·
ψ
(abc)
,为正交矩阵,i
(αβγ)
=[i
α i
β i
γ
]
t
,i
(abc)
=[i
a i
b ic]
t
,ia、ib、ic是电励磁双凸极电机在abc坐标系下的三相电流,i
α
、i
β
、i
γ
是电励磁双凸极电机在αβγ坐标系下的电流,ψ
af
、ψ
bf
、ψ
cf
是abc坐标系下的三相互感磁链,ψ
α
、ψ
β
、ψ
γ
是αβγ坐标系下的互感磁链;
[0019]
基于电励磁双凸极电机的三相共中性点连接而使的特征,得
到电励磁双凸极电机在αβγ坐标系下的励磁转矩公式
[0020]
对电励磁双凸极电机在αβγ坐标系下的励磁转矩公式变换得到极坐标系下励磁转矩公式其中,其中,
[0021]
其进一步的技术方案为,确定合成磁链变化率矢量的幅值和相角η的方法包括:
[0022]
将电励磁双凸极电机在abc坐标系下的三相互感磁链对位置信号θ的偏导通过3/2变换得到αβγ坐标系下的互感磁链对位置信号θ的偏导为
[0023]
由αβγ坐标系下的互感磁链对位置信号θ的偏导变换得到极坐标系下的合成磁链变化率矢量的幅值和相角η为
[0024][0025]
其进一步的技术方案为,该方法还包括:
[0026]
建立电励磁双凸极电机各相的磁链位置对应表,磁链位置对应表反映abc坐标系下的三相互感磁链对位置信号的偏导与位置信号θ的对应关系;
[0027]
在电励磁双凸极电机运行过程中,确定磁链位置对应表中与当前的位置信号θ对应的三相互感磁链对位置信号的偏导p=a,b,c。
[0028]
其进一步的技术方案为,建立电励磁双凸极电机各相的磁链位置对应表的方法包括:
[0029]
测量电励磁双凸极电机在空载转速ω下的三相空载反电势e
pf
,其中,p=a,b,c;
[0030]
通过计算得到不同位置信号θ下的建立得到磁链位置对应表。
[0031]
其进一步的技术方案为,转换得到abc坐标系下的三相电流给定值的方法包括:
[0032]
将极坐标系下的合成电流矢量is的幅值|is|和相角δ变换得到αβγ坐标系下的电流
[0033]
将αβγ坐标系下电流i
α
、i
β
经过2/3变换得到abc坐标系下的三相电流给定值
[0034]
其进一步的技术方案为,控制电励磁双凸极电机的三相电流实际值跟随三相电流给定值的方法包括,对于电励磁双凸极电机的任一相的电枢绕组:
[0035]
采用滞环控制的方式,将电枢绕组的电流给定值与电流实际值相减后经过滞环比较器控制变换器中对应桥臂功率管的通断,使得电枢绕组的电流实际值与电流给定值的差值不超过滞环控制器的环宽,从而使电流实际值跟随电流给定值。
[0036]
本技术的有益技术效果是:
[0037]
本技术公开了一种基于坐标变换抑制转矩脉动的电励磁双凸极电机控制方法,该方法由极坐标系下的励磁转矩公式可将电流的幅值和相角解耦控制,对相角的控制可以减小电机运行的铜耗以提高电机运行的效率,对幅值的控制则可以抑制转矩脉动的产生,由极坐标系下的电流幅值及相角经过反变换即可得到三相电流给定值,利用电流调节器使三相实际电流跟随给定电流,即可实现转矩脉动的抑制。该方法解决了电励磁双凸极电机采用传统的角度控制抑制转矩脉动时,提前或滞后的角度难以选取的问题,在抑制转矩脉动的同时,能够减小电励磁双凸极电机运行时的铜耗,控制简单、灵活。
[0038]
该方法在电机在运行过程中电流的换相依据各相的互感磁链变化率来确定,解决了传统电流控制中提前滞后角度难以确定的问题,根据各相产生转矩能力的大小来分配各相电流给定值,降低了电机铜耗。
附图说明
[0039]
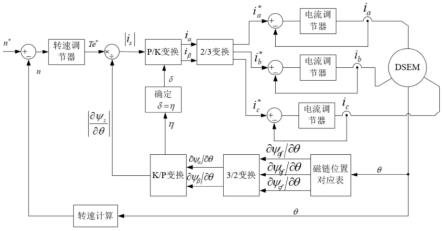
图1是本技术一个实施例中的系统控制框图。
[0040]
图2是本技术一个仿真实例中的一个电周期中的合成磁链变化率矢量的幅相曲线。
[0041]
图3是本技术一个仿真实例中的一个电周期中的合成电流矢量的幅相曲线。
[0042]
图4是本技术一个仿真实例中的一个电周期中的三相电流及三相互感磁链对位置信号的偏导的波形。
[0043]
图5是本技术一个仿真实例中的转速、转矩仿真波形图。
具体实施方式
[0044]
下面结合附图对本技术的具体实施方式做进一步说明。
[0045]
本技术公开了一种基于坐标变换抑制转矩脉动的电励磁双凸极电机控制方法,请参考图1所示的控制框图,该方法包括如下步骤:
[0046]
步骤110,确定电励磁双凸极电机在极坐标系下的励磁转矩公式。
[0047]
确定得到的极坐标系下的励磁转矩公式反映励磁转矩te与合成电流矢量is和合成磁链变化率矢量之间的关系。合成电流矢量is包括幅值|is|和相角δ。合成磁链变化率矢量包括幅值和相角η。其中,ψs是合成磁链,θ是位置信号。
[0048]
在一个实施例中,确定得到的电励磁双凸极电机在极坐标系下的励磁转矩公式为在一个实施例中,确定电励磁双凸极电机在极坐标系下的励磁转矩公式的方法为:
[0049]
将电励磁双凸极电机在abc坐标系下的励磁转矩公式变换至αβγ坐标系得到其中,i
(αβγ)
=c
·i(abc)
,ψ
(αβγ)
=c
·
ψ
(abc)
,为正交矩阵,i
(αβγ)
=[i
α i
β i
γ
]
t
,i
(abc)
=[i
a i
b ic]
t
,ia、ib、ic是电励磁双凸极电机在abc坐标系下的三相电流,i
α
、i
β
、i
γ
是电励磁双凸极电机在αβγ坐标系下的电流。标系下的电流。ψ
af
、ψ
bf
、ψ
cf
是abc坐标系下的三相互感磁链,是励磁电流if在电枢绕组中产生的互感磁链且有ψ
pf
=ifl
pf
,l
pf
是三相的电枢绕组与励磁绕组间的互感,p=a,b,c分别对应三相的电枢绕组,ψ
α
、ψ
β
、ψ
γ
是αβγ坐标系下的互感磁链。
[0050]
由于电励磁双凸极电机的主功率变换器采用的是桥式变换器,三相共中性点连接,从而可得三相电流之和为零,也即有的特征,得到电励磁双凸极电机在αβγ坐标系下的励磁转矩公式
[0051]
对电励磁双凸极电机在αβγ坐标系下的励磁转矩公式变换得到极坐标系下励磁转矩公式其中,其中,
[0052]
步骤120,根据电励磁双凸极电机在abc坐标系下的三相互感磁链ψ
af
、ψ
bf
、ψ
cf
对位置信号θ的偏导确定合成磁链变化率矢量的幅值和相角η。
[0053]
在一个实施例中,预先建立有电励磁双凸极电机各相的磁链位置对应表,该磁链位置对应表反映abc坐标系下的三相互感磁链对位置信号的偏导与位置信号θ的对应关系。然后在电励磁双凸极电机运行过程中,确定磁链位置对应表中与当前的位置信号θ对应的三相互感磁链对位置信号的偏导p=a,b,c分别表示三相的电枢绕组,也即得到三相互感磁链对位置信号θ的偏导
[0054]
其中,建立磁链位置对应表的方法包括:测量电励磁双凸极电机在空载转速ω下的三相空载反电势e
pf
,通过计算得到不同位置信号θ下的建立得到磁链位置对应表。
[0055]
在一个实施例中,确定幅值和相角η的方法包括:
[0056]
将电励磁双凸极电机在abc坐标系下的三相互感磁链对位置信号θ的偏导通过3/2变换得到αβγ坐标系下的互感磁链对位置信号θ的偏导为
[0057]
由αβγ坐标系下的互感磁链对位置信号θ的偏导变换得到极坐标系下
的合成磁链变化率矢量的幅值和相角η为
[0058][0059]
步骤130,基于极坐标系下的励磁转矩公式根据合成磁链变化率矢量的相角η确定使得转矩电流比最大的合成电流矢量is的相角δ,并根据励磁转矩的给定值te
*
以及合成磁链变化率矢量的幅值确定合成电流矢量is的幅值|is|。其中,励磁转矩的给定值te
*
由电励磁双凸极电机的转速给定值n
*
和转速实际值n的差值经过转速调节器输出得到,转速实际值n通过对位置信号θ进行转速计算得到。
[0060]
基于步骤120公开的励磁转矩公式的表达式确定当δ=η时,在相同的幅值|is|和幅值下可以使得励磁转矩最大,从而获得最大的转矩电流比,从而可以减少电枢绕组的铜耗,因此取使得转矩电流比最大的合成电流矢量is的相角δ等于合成磁链变化率矢量的相角η。确定合成电流矢量is的幅值
[0061]
步骤140,将极坐标系下的合成电流矢量is的幅值|is|和相角δ转换得到abc坐标系下的三相电流给定值。
[0062]
在一个实施例中,该步骤的实现方法包括:将极坐标系下的合成电流矢量is的幅值|is|和相角δ变换得到αβγ坐标系下的电流然后将将αβγ坐标系下电流i
α
、i
β
经过2/3变换得到abc坐标系下的三相电流给定值
[0063]
步骤150,利用电流调节器控制电励磁双凸极电机的三相电流实际值跟随三相电流给定值。包括对于电励磁双凸极电机的任一相的电枢绕组:采用滞环控制的方式,将电枢绕组的电流给定值与电流实际值相减后经过滞环比较器控制变换器中对应桥臂功率管的通断,使得电枢绕组的电流实际值与电流给定值的差值不超过滞环控制器的环宽,从而使电流实际值跟随电流给定值。
[0064]
利用本技术提供的方法可以通过对电流的控制达到控制转矩,进一步控制转速,降低转矩脉动的目的。为了验证该方法对电励磁双凸极电机的转矩脉动降低的有效性,对一台电励磁双凸极电机进行matlab/simulink仿真。仿真的转速给定为500rpm,空载起动,0.15s突加负载。
[0065]
转速稳定时,一个电周期下的合成磁链变化率矢量的幅相曲线如图2所示,合成电流矢量is的幅相曲线如图3所示。根据图2和3中和is的幅值及相角变化的大小程度,将一个电周期划分为六个扇区i~vi,从图中可以看出,在扇区ii、iv、vi下,合成电流矢量is的幅值有明显增大,以抵消合成磁链变化率矢量的幅值减小。在扇区i、iii、v下,合成电流矢量is的幅值变化不大,这是由于合成磁链变化率矢量的幅值相应变化比较小,从而在整个电周期内,合成电流矢量is的相角等于合成磁链变化率矢量的相角,合成电流矢量is的幅值与合成磁链变化率矢量的幅值成反比,从极坐标系下的励磁转矩公式可知,所提控制策略对电励磁双凸极电机的转矩脉动有很好的抑制作用。
[0066]
一个电周期下三相电流及三相互感磁链对位置信号的偏导如图4所示,代表各相在不同位置信号处电流产生转矩的能力,其值越大则电流产生转矩的能力越强。当在扇区ii、iv、vi下,电励磁双凸极电机其中一相处在电感最大值附近,此时各相的均比较小,电流产生转矩的能力较弱,从而相应的有两相电流明显增大以此来减小转矩脉动,另一相电流由正到负完成了换相过程。当在扇区i、iii、iv下,此时各相变化范围较小,其中两相幅值较大,从而相应的有两相电流维持较大且平稳的状态。电励磁双凸极电机在运行过程中三相均有电流,且三相电流大小的分配与各相产生转矩能力的强弱成正比,降低了电枢绕组的铜耗。
[0067]
电励磁双凸极电机的转速、转矩仿真波形如图5所示,从图5可以看出,转速稳定时转矩脉动率约为10%,使电励磁双凸极电机的转矩脉动得到了显著降低,转速控制平稳,提升了电励磁双凸极电机的运行性能。
[0068]
以上所述的仅是本技术的优选实施方式,本技术不限于以上实施例。可以理解,本领域技术人员在不脱离本技术的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1