一种双模块有源电力滤波器并联系统的模型预测控制方法与流程
1.本发明属于电力电子装置中的有源电力滤波技术领域,具体涉及一种有源电力滤波器并联系统的模型预测控制技术。
背景技术:
2.电力系统发电、输电、配电和用电环节中电力电子装置的广泛使用,导致公共电网的谐波污染问题日益严重。与无源电力滤波器相比,有源电力滤波器因其具有稳态精度高、动态响应快、适应电网参数波动能力强、系统稳定性好、装置体积小等诸多优点,成为改善现代电力系统电能质量的主流解决方法。根据系统构成方式不同,有源电力滤波器主要分为串联型、并联型和混合型,其中并联型有源电力滤波器具有方便接入电网、对电网影响小等优点,得到了最为广泛的工业应用。
3.随着电力电子装置等非线性负载的大量接入电网,工业现场对大容量有源电力滤波器的需求越来越旺盛。受限于功率开关器件容量和成本等因素的限制,大容量有源电力滤波器通常采用多模块逆变器并联运行的有源滤波方法。相比独立直流母线多模块并联结构,共直流母线多模块有源电力滤波器并联运行系统具有体积小、成本低、谐波补偿灵活、冗余容错性能好、便于模块化生产等优点,在未来电力电子化电力系统中的谐波治理领域有着很好的应用前景。但是,共直流母线逆变器并联结构导致了固有的环流问题,影响了有源电力滤波器的谐波补偿性能。因此,必须采取有效的控制策略来抑制并联逆变器之间的环流。
4.目前,针对共直流母线多模块有源电力滤波器并联系统的环流抑制问题,文献1(“双重化有源电力滤波器环流抑制策略研究”,葛森等,电气传动,2017,47(1):3
–
6)提出一种无差拍环流抑制策略,通过调整零矢量的作用时间来抑制并联逆变器之间的环流,但是,实际有源电力滤波器系统的各种非线性因素会导致零矢量作用时间产生计算偏差,从而影响谐波补偿精度。文献2(“模块化多apf并联环流抑制研究”,禹华军等,电气自动化,2017,39(1):41
–
44)提出一种正序、负序和零序电流协调控制的环流抑制措施,但是,其中的pi控制器不仅无法实现谐波补偿电流的无静差跟踪效果,而且积分器的存在也降低了系统响应速度。文献3(“selection of design parameters to reduce the zero-sequence circulating current flow in parallel operation of dc linked multiple shunt apf units”,shafiuzzaman k.k.,et al,advances in power electronics,2013,381581:1
–
13)通过优化控制参数改善共直流母线双模块有源电力滤波器并联系统的环流抑制性能,但是,实际中仅仅通过调整参数难以实现环流的有效抑制。因此,一种既能有效抑制并联逆变器环流又能提升有源电力滤波器动态响应速度的控制方法,是大功率多模块有源电力滤波器应用领域迫切需要解决的问题。
技术实现要素:
5.本发明的目的是,针对现有并联逆变器控制技术的不足,提出一种双模块有源电
力滤波器并联系统的模型预测控制方法,抑制并联逆变器环流,改善谐波补偿稳态精度,提高谐波补偿动态响应速度,提升系统效率,降低电容器成本体积。
6.为实现上述目的,本发明一种双模块有源电力滤波器并联系统的模型预测控制方法采用的技术方案是:
7.分别检测且经坐标变换得到dq0坐标系下的三相电网电压以及并联的两个逆变器的三相补偿电流,根据两个逆变器开关状态得到dq0坐标系下的64个合成电压矢量,基于64个合成电压矢量和所述的三相电网电压、所述的三相补偿电流计算出补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1),k为当前检测时间;
8.三相负载电流输入带通滤波器得到基波分量,将三相负载电流i
labc
和基波分量相减后再经坐标变换得到dq0旋转坐标系下的补偿电流给定值i
hdref
、i
hqref
、i
h0ref
,
9.公共直流母线电压及其给定值相比较得到的电压差值经pi调节后获得损耗电流,所述的损耗电流和d轴的补偿电流给定值i
hdref
相加得到补偿电流给定值的d轴总分量i
hdref_tatol
;
10.经价值函数评估计算出64个评估值:
11.k1为并联逆变器的环流抑制权重系数,k2为有源电力滤波器的补偿电流限幅系数;
12.根据64个评估值中最小值对应的合成电压矢量所对应的开关状态控制两个逆变器。
13.进一步地,根据所述的合成电压矢量对并联系统建模,得到连续域电流状态方程,对所述的连续域电流状态方程进行离散化得到所述的补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)。
14.本发明采用上述技术方案后具有以下有益效果:
15.1.本发明将基于共直流母线并联三相逆变器的有源电力滤波器作为六桥臂逆变系统进行整体离散化数学建模,对两个逆变器的三相谐波补偿电流进行电流预测,通过评估价值函数对并联三相逆变器的64个合成电压矢量进行遍历寻优,获得每个逆变器输出的最优电压矢量,实现了两个逆变器之间环流的全局优化,有效抑制了并联逆变器环流,提升了有源电力滤波器的谐波补偿精度和系统效率。
16.2.本发明采用模型预测电流控制策略进行共母线双模块有源电力滤波器的补偿电流控制和开关状态直接优化选择,实现补偿电流闭环预测跟踪控制,补偿电流控制环路中无需传统的pi控制器,因此能够显著提升有源电力滤波器的谐波补偿响应速度,降低电容器成本体积。
附图说明
17.下面结合附图和具体实施方式对本发明的技术方案进行详细说明:
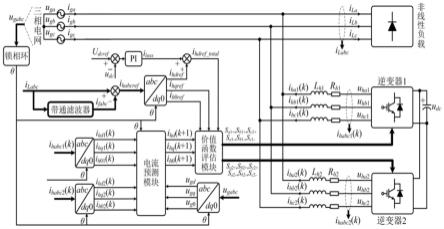
18.图1为双模块有源电力滤波器并联系统的模型预测控制框图;
19.图2为图1中模型预测控制器及其外接结构框图;
20.图3为本发明模型预测控制方法仿真测试下非线性负载的a相电流仿真波形图;
21.图4为本发明模型预测控制方法仿真测试下有源电力滤波器的a相补偿电流仿真波形图;
22.图5为本发明模型预测控制方法仿真测试下并联逆变器的环流仿真波形图;
23.图6为本发明模型预测控制方法仿真测试下电网的a相电流仿真波形图;
24.图7为本发明模型预测控制方法仿真测试下负载突变前后的a相补偿电流仿真波形图。
具体实施方式
25.如图1所示,双模块有源电力滤波器并联系统包括:两个三相逆变器、一个直流母线电容器、两套三相滤波电感、三套三相电流传感器、一套三相电压传感器、一个直流母线电压传感器。其中,两个三相逆变器分别是第一个逆变器1和第二个逆变器2,两套三相滤波电感分别是第一套三相滤波电感l
h1
和第二套三相滤波电感l
h2
。每套三相逆变器的输出端分别串接一套三相滤波电感:第一个逆变器1输出电压u
ha1
、u
hb1
、u
hc1
,第一个逆变器1的输出端串接第一套三相滤波电感l
h1
及其寄生电阻r
h1
;第二个逆变器2输出电压u
ha2
、u
hb2
、u
hc2
,第二个逆变器2的输出端串接第二套三相滤波电感l
h2
及其寄生电阻r
h2
。两套三相滤波电感l
h1
、l
h2
按相并联后分别连接到三相电网,三相电网电压为u
ga
、u
gb
、u
gc
,三相电网的电流为i
ga
、i
gb
、i
gc
。三相电网连接三相非线性负载,非线性负载的三相负载电流为i
la
、i
lb
、i
lc
。第一个逆变器1直流侧正极p1和第二个逆变器2直流侧正极p2并联后再连接到所述的直流母线电容器c
dc
的正极p,第一个逆变器1的直流侧负极n1和第二逆变器2直流侧负极n2并联后连接到直流母线电容器c
dc
的负极n。
26.采用所述的一套三相电压传感器检测三相电网电压u
ga
、u
gb
、u
gc
,u
gabc
=u
ga
、u
gb
、u
gc
,通过锁相环获得电网电压相位角θ,并将三相电网电压u
gabc
及电网电压相位角θ输入双模块有源电力滤波器并联系统的模型预测控制器(以下简称“模型预测控制器”)。
27.采用第一套三相电流传感器检测第一个逆变器1的三相补偿电流i
ha1
(k)、i
hb1
(k)、i
hc1
(k),i
habc1
(k)=i
ha1
(k)、i
hb1
(k)、i
hc1
(k),并将该三相补偿电流i
habc1
(k)输入所述的模型预测控制器中。
28.采用第二套三相电流传感器检测第二个逆变器2的三相补偿电流i
ha2
(k)、i
hb2
(k)、i
hc2
(k),i
habc2
(k)=i
ha2
(k)、i
hb2
(k)、i
hc2
(k),并将该三相补偿电流i
habc2
(k)输入所述的模型预测控制器,k为当前检测时间。
29.采用第三套三相电流传感器检测三相负载电流i
la
、i
lb
、i
lc
,i
labc
=i
la
、i
lb
、i
lc
,并将该三相负载电流i
labc
输入所述的模型预测控制器中。
30.采用所述的一个直流母线电压传感器检测两个并联的三相逆变器1、2的公共直流母线电容器c
dc
的电压u
dc
,称为公共直流母线电压u
dc
,将公共直流母线电压u
dc
输入所述的模型预测控制器中。
31.所述的模型预测控制器的输出端分别连接并联的两个三相逆变器1、2,驱动两个三相逆变器1、2工作。
32.如图2所示,所述的模型预测控制器包括一个带通滤波器、一个电流预测模块、一个pi控制器、一个坐标函数评估模块以及四个坐标变换模块。
33.三相电网电压u
gabc
及其相位角θ共同输入第一个坐标变换模块中,第一个坐标变
换模块对abc静止坐标系下的电网电压进行坐标变换,得到dq0旋转坐标系下的电网电压u
gd
、u
gq
、u
g0
,坐标变换公式如下:
[0034][0035]
将得到的电网电压u
gd
、u
gq
、u
g0
以及电网电压相位角θ共同输入电流预测模块中。
[0036]
第一个逆变器1的三相补偿电流i
habc1
(k)及电网电压相位角θ共同输入第二个坐标变换模块,第二个坐标变换模块对abc静止坐标系下的三相补偿电流i
habc1
(k)进行坐标变换,得到dq0旋转坐标系下的三个补偿电流i
hd1
(k)、i
hq1
(k)、i
h01
(k),坐标变换公式如下:
[0037][0038]
将得到的三个补偿电流i
hd1
(k)、i
hq1
(k)、i
h01
(k)共同输入电流预测模块中。
[0039]
同理,第二个逆变器2的三相补偿电流i
habc2
(k)及电网电压相位角θ共同输入第三个坐标变换模块中,第三个坐标变换模块对abc静止坐标系下的三相补偿电流i
habc2
(k)进行坐标变换,得到dq0旋转坐标系下的三个补偿电流i
hd2
(k)、i
hq2
(k)、i
h02
(k),坐标变换公式如下:
[0040][0041]
将得到的三个补偿电流i
hd2
(k)、i
hq2
(k)、i
h02
(k)共同输入电流预测模块中。
[0042]
所述的三相负载电流i
labc
输入带通滤波器,经带通滤波器后得到基波分量i
fabc
=i
fa
、i
fb
、i
fc
,将三相负载电流i
labc
和基波分量i
fabc
相减,得到有源电力滤波器的补偿电流给定值i
habcref
=i
haref
、i
hbref
、i
hcref
。
[0043]
补偿电流给定值i
habcref
和电网电压相位角θ共同输入第四个坐标变换模块中,基于电网电压相位角θ对abc静止坐标系下的补偿电流给定值i
habcref
进行坐标变换,得到dq0旋转坐标系下的补偿电流给定值i
hdref
、i
hqref
、i
h0ref
,坐标变换公式如下:
[0044][0045]
其中的q轴、0轴的补偿电流给定值i
hqref
、i
h0ref
共同输入价值函数评估模块中。
[0046]
公共直流母线电压u
dc
和直流母线电压给定值u
dcref
相比较得到电压差值,该电压差值输入pi控制器,经pi控制器调节后输出损耗电流i
loss
。将损耗电流i
loss
和第四个坐标变换模块输出的d轴分量的补偿电流给定值i
hdref
相加,得到补偿电流给定值的d轴总分量i
hdref_tatol
。将该补偿电流给定值的d轴总分量i
hdref_tatol
输入到价值函数评估模块中。
[0047]
所述的电流预测模块对输入的电网电压u
gd
、u
gq
、u
g0
、补偿电流i
hd1
(k)、i
hq1
(k)、i
h01
(k)、i
hd2
(k)、i
hq2
(k)、i
h02
(k)以及电网电压相位角θ进行处理,获得补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1),并将补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)共同输入到价值函数评估模块中。
[0048]
具体是:
[0049]
电流预测模块首先根据第一个逆变器1和第二个逆变器2的开关状态及其对应的αβ0坐标系下的8个基本电压值,得到αβ0坐标系下的64个合成电压矢量u
apfα
(j)、u
apfβ
(j)、u
apf0
(j),j=1~64。其中,8个基本电压值如下表1示例:
[0050]
表1
[0051][0052]
其中,64个合成电压矢量u
apfα
(j)、u
apfβ
(j)、u
apf0
(j)的构造如下表2示例:
[0053]
表2
[0054]
[0055]
[0056][0057]
再针对64个合成电压矢量u
apfα
(j)、u
apfβ
(j)、u
apf0
(j),基于电网电压相位角θ对αβ0坐标系下的合成电压矢量u
apfα
(j)、u
apfβ
(j)、u
apf0
(j)进行坐标变换,得到dq0旋转坐标系下的合成电压矢量u
apfd
(j)、u
apfq
(j)、u
apf0
(j),坐标变换公式如下:
[0058][0059]
然后,基于dq0旋转坐标系下的合成电压矢量u
apfd
(j)、u
apfq
(j)、u
apf0
(j)对双模块有源电力滤波器并联系统进行dq0坐标系下的数学建模,得到连续域电流状态方程:
[0060][0061]
其中:i
hd
、i
hq
、i
h0
为dq0坐标系下的总补偿电流:lh为滤波电感,lh=l
h1
=l
h2
,rh为滤波电感的寄生电阻,rh=r
h1
=r
h2
,ts为双模块有源电力滤波器并联系统的采样周期,ω为三相电网电压角频率。
[0062]
对所述的连续域电流状态方程进行前向欧拉离散化,得到计算补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)的预测模型,预测模型如下:
[0063]
[0064]
将64个d轴电压分量u
apfd
(j)、64个q轴电压分量u
apfq
(j)、64个0轴电压分量u
apf0
(j)分别带入i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)的预测模型中,获得64个补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)。将所有的补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)共同输入到价值函数评估模块中。
[0065]
价值函数评估模块对输入的所有的补偿电流预测值i
hd
(k+1)、i
hq
(k+1)、i
h0
(k+1)、补偿电流给定值i
hqref
、i
h0ref
以及补偿电流给定值的d轴总分量i
hdref_tatol
进行处理,经以下公式计算出64个价值函数g
hdq0
,也就是获得64个评估值:
[0066][0067]
其中:k1为并联逆变器的环流抑制权重系数,调整k1可使谐波补偿和环流抑制获得最佳,k2为有源电力滤波器的补偿电流限幅系数,当补偿电流幅值小于限幅值时k2=0,当补偿电流幅值大于限幅值时k2=∞。
[0068]
取64个评估值中最小值所对应的合成电压矢量,该最小值对应的d轴电压分量u
apfd
(j)、q轴电压分量u
apfq
(j)、0轴电压分量u
apf0
(j)的合成电压矢量就是使有源电力滤波器谐波补偿性能最好的最优合成电压矢量u
apfd_opt
、u
apfq_opt
、u
apf0_opt
。
[0069]
根据最优合成电压矢量u
apfd_opt
、u
apfq_opt
、u
apf0_opt
所对应的并联的两个逆变器1、2的开关状态,获得第一个逆变器1的上桥臂驱动信号s
a1+
、s
b1+
、s
c1+
和下桥臂驱动信号s
a1-、s
b1-、s
c1-、第二个逆变器2的上桥臂驱动信号s
a2+
、s
b2+
、s
c2+
和下桥臂驱动信号s
a2-、s
b2-、s
c2-。将驱动信号s
a1+
、s
b1+
、s
c1+
、s
a1-、s
b1-、s
c1-、s
a2+
、s
b2+
、s
c2+
、s
a2-、s
b2-、s
c2-对并联的两个逆变器1、2的12个开关管进行导通和关断控制,使第一个逆变器1输出三相电压u
ha1
、u
hb1
、u
hc1
,使第二个逆变器2输出三相电压u
ha2
、u
hb2
、u
hc2
。其中,三相电压u
ha1
、u
hb1
、u
hc1
作用在滤波电感l
h1
及其寄生电阻r
h1
上产生第一个逆变器1的模型预测电流控制,三相电压u
ha2
、u
hb2
、u
hc2
作用在滤波电感l
h2
及其寄生电阻r
h2
上产生模型预测电流控制,从而实现双模块有源电力滤波器并联系统的模型预测电流控制。
[0070]
为了说明本发明双模块有源电力滤波器并联系统的模型预测控制方法,进行仿真测试,图1所示的并联系统参数如下:滤波电感lh=1mh,滤波电感的寄生电阻rh=0.1ω,电网电压有效值ug=380v,电网基波频率f=50hz,三相不控桥式整流的滤波电感l
load
=3mh,三相不控桥式整流的直流负载电阻r
load
=10ω,模型预测电流控制采样周期ts=0.0001s,直流母线电容c
dc
=2200μf,直流母线电容给定电压u
dcref
=700v。仿真测试获得图3~图7,分别为双模块有源电力滤波器并联系统的非线性负载a相电流、有源电力滤波器a相补偿电流、并联逆变器环流、电网a相电流、负载突变前后a相补偿电流的仿真波形图,在0.5s时,三相不控桥式整流的直流负载电阻从r
load
=10ω突变到r
load
=5ω。从图3~图7可以看出,本发明能有效抑制了并联逆变器的环流问题,提升了有源电力滤波器在稳态情况下的谐波补偿精度和负载突变情况下的谐波补偿响应速度。
[0071]
尽管已经示出和描述了本发明的较佳实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1