基于振荡模式在线辨识的GPSS自动投退方法和装置与流程
基于振荡模式在线辨识的gpss自动投退方法和装置
技术领域
1.本发明涉及电力装置技术领域,尤其涉及一种基于振荡模式在线辨识的gpss自动投退方法和装置。
背景技术:
2.当前,电力系统稳定器(pss,power system stabilizer)是世界上使用最广泛、最经济且技术较为成熟的抑制低频振荡的措施。实际上,pss也可以装设在同步发电机组的调速装置侧,这种pss可简称为gpss(governor power system stabilizer)。gpss的主要原理是当出现超低频振荡时,能产生一个与频差反向的机械功率(力矩)增量,就相当于为装置附加了正的机械阻尼,从而起到抑制超低频振荡的作用。但是,gpss存在调速油泵工作频繁而引起严重的过热和油压降低的问题。因此,本发明提供了一种基于振荡模式在线辨识的gpss自动投退方法和装置,用于实现gpss功能有针对性地自动投退,避免gpss长期投入可能会造成的油泵工作频繁问题,同时保证gpss工作在整定的超低频振荡有效频段内,避免gpss对其他频段的振荡造成负面影响。
技术实现要素:
3.本发明提供了一种基于振荡模式在线辨识的gpss自动投退方法和装置,用于实现gpss功能有针对性地自动投退,避免gpss长期投入可能会造成的油泵工作频繁问题,同时保证gpss工作在整定的超低频振荡有效频段内,避免gpss对其他频段的振荡造成负面影响。
4.有鉴于此,本发明第一方面提供了一种基于振荡模式在线辨识的gpss自动投退方法,包括以下步骤:
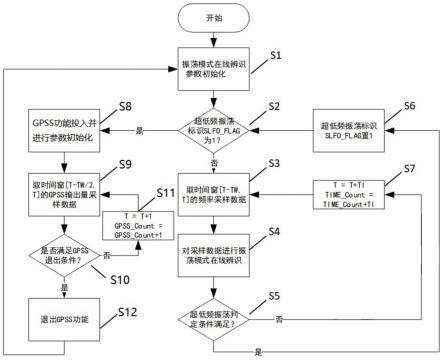
5.s1、对gpss振荡模式在线辨识的第一参数进行初始化,第一参数包括当前时间标识、超低频振荡标识、超低频振荡计数器和振荡模式在线辨识计时器;
6.s2、检测超低频振荡标识是否为1,若是,则跳转至步骤s8,否则跳转至步骤s3;
7.s3、以当前时间为基点,取过去预置分析时间窗长度时间段的频率采样数据;
8.s4、对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识;
9.s5、根据振荡模式在线辨识结果判断是否满足超低频振荡条件,若是,则跳转至步骤s6,否则跳转至步骤s7;
10.s6、将超低频振荡标识置1,返回步骤s2;
11.s7、将当前时间标识和振荡模式在线辨识计时器均加上振荡分析滑动步长,返回步骤s3;
12.s8、投入gpss功能,进行第二参数初始化,跳转至步骤s9,第二参数包括gpss连续动作计时器和gpss输出死区计数器;
13.s9、以当前时间为基点,取过去预置分析时间窗长度一半的时间段的gpss输出量采样数据;
14.s10、根据gpss输出量采样数据判断是否满足gpss退出条件,若是,则跳转至步骤s12,否则跳转至步骤s11;
15.s11、将当前时间标识加1,gpss连续动作计时器加1,返回步骤s9;
16.s12、退出gpss功能,返回步骤s1。
17.可选地,步骤s10具体包括:
18.s101、分别计算gpss输出量采样数据中的正数值平均值和负数值平均值,取正数值平均值和负数值平均值中绝对值较大的作为目标平均值;
19.s102、判定目标平均值的绝对值是否满足大于gpss停止死区
×
gpss最大动作时间的条件,若是,则跳转至步骤s12,否则跳转至步骤s103;
20.s103、分别计算gpss输出量采样数据的最大值和最小值,跳转至步骤s104;
21.s104、判定gpss输出量采样数据的最大值的绝对值是否小于gpss停止死区,且gpss输出量采样数据的最小值的绝对值是否小于gpss停止死区,若是,则判断gpss输出近似为0,已进入死区,跳转至步骤s107,否则,跳转至步骤s105;
22.s105、将当前时间标识加1,gpss连续动作计时器加1,并跳转至步骤s106;
23.s106、判定gpss连续动作计时器是否大于gpss最大动作时间,若是,则跳转至步骤s12,否则跳转至步骤s9;
24.s107、将gpss输出死区计数器加1,跳转至步骤s108;
25.s108、判定gpss输出死区计数器是否大于过去预置分析时间窗长度一半,若是,则跳转至步骤s12,否则,跳转至步骤s105。
26.可选地,步骤s4中采用prony分析方法对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识。
27.可选地,步骤s5包括:
28.s51、记时间窗[t-tw,t]的频率采样数据的峰峰值为ppv,其中,t为当前时间标识,tw为预置分析时间窗长度;
[0029]
s52、判断ppv是否大于2倍的频率振荡死区,若是,则跳转至步骤s53,否则,跳转至步骤s511;
[0030]
s53、筛选出振荡模式在线辨识中幅值结果大于th2
×
ppv/2且排名前th3的模态,其中,th2为模态最小幅值,th3为模态数量上限;
[0031]
s54、判定筛选得到的模态中是否有频率处于模态频率下限~模态频率上限范围内的模态,若有,则跳转到步骤s55,若没有,则跳转到步骤s511;
[0032]
s55、判断频率处于模态频率下限~模态频率上限范围内的模态的阻尼比是否小于模态阻尼比阈值,若是,则跳转至步骤s56,否则跳转至步骤s511;
[0033]
s56、将超低频振荡计数器加1,并跳转到步骤s57;
[0034]
s57、判定超低频振荡计数器是否由0变1,若是,则跳转至步骤s510,否则跳转至步骤s58;
[0035]
s58、判定超低频振荡计数器是否大于振荡次数阈值,若是,则跳转至步骤s59,否则跳转至步骤s511;
[0036]
s59、将超低频振荡标识置1,跳转至步骤s2;
[0037]
s510、将振荡模式在线辨识计时器置0,跳转至步骤s511;
[0038]
s511、将当前时间标识加上振荡分析滑动步长,振荡模式在线辨识计时器加上振荡分析滑动步长,跳转至步骤s512;
[0039]
s512、判定振荡模式在线辨识计时器是否大于归零最大时间,若是,则跳转至步骤s513,否则跳转至步骤s2;
[0040]
s513、将超低频振荡计数器置0,并跳转至步骤s2。
[0041]
可选地,步骤s6具体包括:
[0042]
s61、根据振荡频率判断是否满足参数切换条件,若是,则跳转至步骤s62,否则,跳转至步骤s63;
[0043]
s62、切换gpss控制环节参数,并跳转到步骤s63;
[0044]
s63、当前时间标识加上振荡分析滑动步长,振荡模式在线辨识计时器加上振荡分析滑动步长,返回步骤s3;
[0045]
s63、将超低频振荡标识置1,返回步骤s2。
[0046]
本发明第二方面提供了一种基于振荡模式在线辨识的gpss自动投退装置,包括控制模块;
[0047]
控制模块用于执行以下步骤:
[0048]
s1、对gpss振荡模式在线辨识的第一参数进行初始化,第一参数包括当前时间标识、超低频振荡标识、超低频振荡计数器和振荡模式在线辨识计时器;
[0049]
s2、检测超低频振荡标识是否为1,若是,则跳转至步骤s8,否则跳转至步骤s3;
[0050]
s3、以当前时间为基点,取过去预置分析时间窗长度时间段的频率采样数据;
[0051]
s4、对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识;
[0052]
s5、根据振荡模式在线辨识结果判断是否满足超低频振荡条件,若是,则跳转至步骤s6,否则跳转至步骤s7;
[0053]
s6、将超低频振荡标识置1,返回步骤s2;
[0054]
s7、将当前时间标识和振荡模式在线辨识计时器均加上振荡分析滑动步长,返回步骤s3;
[0055]
s8、投入gpss功能,进行第二参数初始化,跳转至步骤s9,第二参数包括gpss连续动作计时器和gpss输出死区计数器;
[0056]
s9、以当前时间为基点,取过去预置分析时间窗长度一半的时间段的gpss输出量采样数据;
[0057]
s10、根据gpss输出量采样数据判断是否满足gpss退出条件,若是,则跳转至步骤s12,否则跳转至步骤s11;
[0058]
s11、将当前时间标识加1,gpss连续动作计时器加1,返回步骤s9;
[0059]
s12、退出gpss功能,返回步骤s1。
[0060]
可选地,步骤s10具体包括:
[0061]
s101、分别计算gpss输出量采样数据中的正数值平均值和负数值平均值,取正数值平均值和负数值平均值中绝对值较大的作为目标平均值;
[0062]
s102、判定目标平均值的绝对值是否满足大于gpss停止死区
×
gpss最大动作时间的条件,若是,则跳转至步骤s12,否则跳转至步骤s103;
[0063]
s103、分别计算gpss输出量采样数据的最大值和最小值,跳转至步骤s104;
[0064]
s104、判定gpss输出量采样数据的最大值的绝对值是否小于gpss停止死区,且gpss输出量采样数据的最小值的绝对值是否小于gpss停止死区,若是,则判断gpss输出近似为0,已进入死区,跳转至步骤s107,否则,跳转至步骤s105;
[0065]
s105、将当前时间标识加1,gpss连续动作计时器加1,并跳转至步骤s106;
[0066]
s106、判定gpss连续动作计时器是否大于gpss最大动作时间,若是,则跳转至步骤s12,否则跳转至步骤s9;
[0067]
s107、将gpss输出死区计数器加1,跳转至步骤s108;
[0068]
s108、判定gpss输出死区计数器是否大于过去预置分析时间窗长度一半,若是,则跳转至步骤s12,否则,跳转至步骤s105。
[0069]
可选地,步骤s4中采用prony分析方法对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识。
[0070]
可选地,步骤s5包括:
[0071]
s51、记时间窗[t-tw,t]的频率采样数据的峰峰值为ppv,其中,t为当前时间标识,tw为预置分析时间窗长度;
[0072]
s52、判断ppv是否大于2倍的频率振荡死区,若是,则跳转至步骤s53,否则,跳转至步骤s511;
[0073]
s53、筛选出振荡模式在线辨识中幅值结果大于th2
×
ppv/2且排名前th3的模态,其中,th2为模态最小幅值,th3为模态数量上限;
[0074]
s54、判定筛选得到的模态中是否有频率处于模态频率下限~模态频率上限范围内的模态,若有,则跳转到步骤s55,若没有,则跳转到步骤s511;
[0075]
s55、判断频率处于模态频率下限~模态频率上限范围内的模态的阻尼比是否小于模态阻尼比阈值,若是,则跳转至步骤s56,否则跳转至步骤s511;
[0076]
s56、将超低频振荡计数器加1,并跳转到步骤s57;
[0077]
s57、判定超低频振荡计数器是否由0变1,若是,则跳转至步骤s510,否则跳转至步骤s58;
[0078]
s58、判定超低频振荡计数器是否大于振荡次数阈值,若是,则跳转至步骤s59,否则跳转至步骤s511;
[0079]
s59、将超低频振荡标识置1,跳转至步骤s2;
[0080]
s510、将振荡模式在线辨识计时器置0,跳转至步骤s511;
[0081]
s511、将当前时间标识加上振荡分析滑动步长,振荡模式在线辨识计时器加上振荡分析滑动步长,跳转至步骤s512;
[0082]
s512、判定振荡模式在线辨识计时器是否大于归零最大时间,若是,则跳转至步骤s513,否则跳转至步骤s2;
[0083]
s513、将超低频振荡计数器置0,并跳转至步骤s2。
[0084]
可选地,步骤s6具体包括:
[0085]
s61、根据振荡频率判断是否满足参数切换条件,若是,则跳转至步骤s62,否则,跳转至步骤s63;
[0086]
s62、切换gpss控制环节参数,并跳转到步骤s63;
[0087]
s63、将超低频振荡标识置1,返回步骤s2。
[0088]
从以上技术方案可以看出,本发明提供的基于振荡模式在线辨识的gpss自动投退方法和装置具有以下优点:
[0089]
本发明提供的基于振荡模式在线辨识的gpss自动投退方法,在进行振荡模式在线辨识参数初始化后,检测超低频振荡标识是否为1,若不为1,则取预置时间窗长度的频率采样数据进行振荡模式在线辨识直到满足超低频振荡条件时,将超低频振荡标识置为1,在超低频振荡标识为1时投入gpss功能,在满足gpss退出条件时再退出gpss功能,实现了gpss功能有针对性地自动投退,避免gpss长期投入可能会造成的油泵工作频繁问题,同时保证gpss工作在整定的超低频振荡有效频段内,避免gpss对其他频段的振荡造成负面影响。
[0090]
同时,gpss中配置两套gpss控制参数,可根据超低频振荡分析结果,对gpss参数进行自动切换,以更好地适应整个超低频振荡频段。
[0091]
本发明提供的基于振荡模式在线辨识的gpss自动投退装置,用于执行本发明提供的基于振荡模式在线辨识的gpss自动投退方法,其原理和所取得的技术效果与本发明提供的基于振荡模式在线辨识的gpss自动投退方法相同,在此不再赘述。
附图说明
[0092]
为了更清楚的说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0093]
图1为本发明中提供的一种基于振荡模式在线辨识的gpss自动投退方法的一个实施例的流程示意图;
[0094]
图2为本发明中提供的一种基于振荡模式在线辨识的gpss自动投退方法的另一个实施例的流程示意图;
[0095]
图3为本发明中提供的超低频振荡判定条件示意图;
[0096]
图4为本发明提供的gpss退出条件示意图。
具体实施方式
[0097]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0098]
为了便于理解,请参阅图1,本发明中提供了一种基于振荡模式在线辨识的gpss自动投退方法的实施例,包括:
[0099]
步骤s1、对gpss振荡模式在线辨识的第一参数进行初始化,第一参数包括当前时间标识、超低频振荡标识、超低频振荡计数器和振荡模式在线辨识计时器。
[0100]
需要说明的是,本发明实施例中,首先需要对gpss进行振荡模式在线辨识的第一参数进行初始化,第一参数的描述如表1所示。
[0101]
表1
[0102][0103]
其中,若采用prony分析方法进行振荡模式在线辨识,time_count对应的描述即为prony分析计时器。当前时间标识用t表示,超低频振荡标识用slfo_flag,当slfo_flag值为1时表示振荡模式在线辨识功能监测到发生超低频振荡,超低频振荡计数器用slfo_count表示,当振荡模式在线辨识结果满足阈值参数时,slfo_count加1,振荡模式在线辨识计时器用time_count表示,当slfo_count由0变1时,time_count清零。
[0104]
步骤s2、检测超低频振荡标识是否为1,若是,则跳转至步骤s8,否则跳转至步骤s3。
[0105]
需要说明的是,检测超低频振荡标识slfo_flag是否为1,若超低频振荡标识slfo_flag为1,则投入gpss功能,跳转至步骤s8,否则跳转至步骤s3。
[0106]
步骤s3、以当前时间为基点,取过去预置分析时间窗长度时间段的频率采样数据。
[0107]
需要说明的是,若超低频振荡标识slfo_flag不为1,则以当前时间为基点,取过去预置分析时间窗长度时间段的频率采样数据,其中,预置分析时间窗长度用tw表示,tw可以根据实际情况进行设定。
[0108]
步骤s4、对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识。
[0109]
需要说明的是,常用的信号分析方法如傅氏算法、快速傅氏变换算法、小波分析等应用非常广泛,但分析振荡问题时还存在难于提取衰减特征等局限性。而prony分析方法用指数函数的一个线性组合来描述等间距采样数据的数学模型,然后对模型多项式的特征值进行求解,进而得到给定信号的不同模态频率、幅值、初相和衰减因子等信息。利用prony分析方法,能直接提取出振荡信号的特征,为进行振荡模式和阻尼分析提供基础。由于prony方法不需要建立系统数学模型,对大电网振荡模式分析具有独特的优势。因此,在本发明实施例中,采用prony分析方法对超低频振荡进行辨识。
[0110]
步骤s5、根据振荡模式在线辨识结果判断是否满足超低频振荡条件,若是,则跳转至步骤s6,否则跳转至步骤s7。
[0111]
需要说明的是,若根据步骤s4得到的频率采样数据进行prony分析的结果满足超低频振荡条件,则将超低频振荡标识slfo_flag置1,返回步骤s2。若根据步骤s4得到的频率采样数据进行prony分析的结果不满足超低频振荡条件,则执行步骤s7。
[0112]
本发明实施例中,根据prony分析得到的振荡模态的频率、幅值及阻尼比信息,提取主导超低频振荡模态来判断是否满足超低频振荡条件。超低频振荡条件主要参数如表2所示。
[0113]
表2
[0114]
参数类型单位描述th1浮点型hz频率振荡死区th2浮点型p.u.模态最小幅值th3整型-模态数量上限th4浮点型hz模态频率下限th5浮点型hz模态频率上限th6浮点型-模态阻尼比阈值th7整型-振荡次数阈值th8整型s归零最大时间
[0115]
因而,在一个实施例中,如图3所示,步骤s5的具体步骤为:
[0116]
步骤s51、记时间窗[t-tw,t][t-tw,t]的频率采样数据的峰峰值为ppv,其中,t为当前时间标识,tw为预置分析时间窗长度。
[0117]
步骤s52、判断ppv是否大于2倍的频率振荡死区th1,即是否满足ppv》2
×
th1,若是,则跳转至步骤s53,否则,跳转至步骤s511。该步骤可以规避频率小波动对振荡分析的影响。
[0118]
步骤s53、筛选出振荡模式在线辨识中幅值结果大于th2
×
ppv/2且排名前th3的模态。该步骤可以过滤掉prony分析结果中幅值较小的高频分量以及减少prony分析过拟合对分析结果的影响。
[0119]
步骤s54、判定筛选得到的模态中是否有频率处于模态频率下限th4~模态频率上限th5范围内的模态,若有,则跳转到步骤s55,若没有,则跳转到步骤s511。th4参数的设置一方面是为了过滤掉直流模态的影响,另一方面设定了目前gpss模块能够有效抑制振荡频率的下限,th5为模态选择频率上限,当振荡频率低于th5时,认为系统发生超低频振荡。
[0120]
步骤s55、判断频率处于模态频率下限~模态频率上限范围内的模态的阻尼比是否小于模态阻尼比阈值th6,若是,则认为主导振荡模态的阻尼比较低,判定此时发生了超低频振荡,跳转至步骤s56,否则跳转至步骤s511。
[0121]
步骤s56、将超低频振荡计数器slfo_count加1,并跳转到步骤s57。
[0122]
步骤s57、判定超低频振荡计数器slfo_count是否由0变1,若是,则跳转至步骤s510,否则跳转至步骤s58;
[0123]
步骤s58、判定超低频振荡计数器slfo_count是否大于振荡次数阈值th7,若是,则跳转至步骤s59,否则跳转至步骤s511。该步骤的可以实现多次滚动prony分析,从而确认系统发生超低频振荡。
[0124]
步骤s59、将超低频振荡标识slfo_flag置1,跳转至步骤s2。
[0125]
步骤s510、将振荡模式在线辨识计时器time_count置0,跳转至步骤s511。
[0126]
步骤s511、将当前时间标识t加上振荡分析滑动步长ti,振荡模式在线辨识计时器time_count加上振荡分析滑动步长ti,跳转至步骤s512。
[0127]
步骤s512、判定振荡模式在线辨识计时器time_count是否大于归零最大时间th8,若是,则跳转至步骤s513,否则跳转至步骤s2。该步骤可以防止在长时间周期内超低频振荡计数器slfo_count累计超过th7,造成gpss误投入。
[0128]
步骤s513、将超低频振荡计数器slfo_count置0,并跳转至步骤s2。
[0129]
至此,完成了超低频振荡条件的判断。
[0130]
步骤s6、将超低频振荡标识置1,返回步骤s2。
[0131]
需要说明的是,在满足超低频振荡条件之后,将超低频振荡标识slfo_flag置1,并返回执行步骤s2。在一个实施例中,为避免单一一套gpss参数可能无法适应整个超低频振荡频段(0.01hz~0.1hz),可以在gpss内置两套gpss控制参数。在满足超低频振荡条件之后,执行以下步骤:
[0132]
s61、根据振荡频率判断是否满足参数切换条件,若是,则跳转至步骤s62,否则,跳转至步骤s63;
[0133]
s62、切换gpss控制环节参数,并跳转到步骤s63;
[0134]
s63、将超低频振荡标识置1,返回步骤s2。
[0135]
步骤s7、将当前时间标识和振荡模式在线辨识计时器均加上振荡分析滑动步长,返回步骤s3。
[0136]
需要说明的是,若根据步骤s4得到的频率采样数据进行prony分析的结果不满足超低频振荡条件,则将当前时间标识t和振荡模式在线辨识计时器time_count均加上振荡分析滑动步长ti,返回执行步骤s3,从而实现滑动时间窗在线prony分析。
[0137]
步骤s8、投入gpss功能,进行第二参数初始化,跳转至步骤s9,第二参数包括gpss连续动作计时器和gpss输出死区计数器。
[0138]
需要说明的是,gpss功能投入前需要对第二参数进行初始化,第二参数的信息如表3所示。
[0139]
表3
[0140]
参数类型单位描述初始值gpss_count整型-gpss连续动作计时器gpss_countzero_count整型-gpss输出死区计数器zero_count
[0141]
步骤s9、以当前时间为基点,取过去预置分析时间窗长度一半的时间段的gpss输出量采样数据。
[0142]
需要说明的是,第二参数初始化后,以当前时间为基点,取tw/2时间段的gpss输出量采样数据。
[0143]
步骤s10、根据gpss输出量采样数据判断是否满足gpss退出条件,若是,则跳转至步骤s12,否则跳转至步骤s11。
[0144]
需要说明的是,gpss退出条件主要参数详见表4。
[0145]
表4
[0146]
参数类型单位描述th9浮点型p.u.gpss退出限幅系数th10浮点型%gpss输出限幅值th11浮点型%gpss停止死区th12整型sgpss最大动作时间
[0147]
如图4所示,本发明实施例中步骤s10的具体执行过程为:
[0148]
步骤s101、分别计算gpss输出量采样数据中的正数值平均值和负数值平均值,取正数值平均值和负数值平均值中绝对值较大的作为目标平均值,记为mean,跳转执行步骤
s102;
[0149]
步骤s102、判定目标平均值mean的绝对值是否满足大于gpss停止死区
×
gpss最大动作时间的条件,即mean的绝对值是否大于th9
×
th10,若是,则跳转至步骤s12,否则跳转至步骤s103。该步骤可以防止gpss输出持续超限幅值。
[0150]
步骤s103、分别计算gpss输出量采样数据的最大值和最小值,分别记为max和min,跳转至步骤s104。
[0151]
步骤s104、判定gpss输出量采样数据的最大值的绝对值是否小于gpss停止死区,且gpss输出量采样数据的最小值的绝对值是否小于gpss停止死区,即是否满足|max|《th11且|min|《th11,若是,则判断gpss输出近似为0,已进入死区,跳转至步骤s107,否则,跳转至步骤s105。
[0152]
步骤s105、将当前时间标识t加1,gpss连续动作计时器gpss_count加1,并跳转至步骤s106。
[0153]
步骤s106、判定gpss连续动作计时器gpss_count是否大于gpss最大动作时间th12,若是,则跳转至步骤s12,否则跳转至步骤s9。该步骤的设置可以避免gpss长时间投入对机组产生负面影响。
[0154]
步骤s107、将gpss输出死区计数器zero_count加1,跳转至步骤s108。
[0155]
步骤s108、判定gpss输出死区计数器zero_count是否大于过去预置分析时间窗长度一半,即tw/2,若是,则跳转至步骤s12,否则,跳转至步骤s105。
[0156]
至此,完成了gpss是否满足退出条件的判断。
[0157]
步骤s11、将当前时间标识加1,gpss连续动作计时器加1,返回步骤s9。
[0158]
需要说明的是,若步骤s10的结果为不满足gpss退出条件,则将当前时间标识加1,gpss连续动作计时器加1,返回步骤s9。
[0159]
步骤s12、退出gpss功能,返回步骤s1。
[0160]
需要说明的是,若步骤s10的结果为满足gpss退出条件,则退出gpss功能,返回步骤s1。
[0161]
本发明提供的基于振荡模式在线辨识的gpss自动投退方法,在进行振荡模式在线辨识参数初始化后,检测超低频振荡标识是否为1,若不为1,则取预置时间窗长度的频率采样数据进行振荡模式在线辨识直到满足超低频振荡条件时,将超低频振荡标识置为1,在超低频振荡标识为1时投入gpss功能,在满足gpss退出条件时再退出gpss功能,实现了gpss功能有针对性地自动投退,避免gpss长期投入可能会造成的油泵工作频繁问题,同时保证gpss工作在整定的超低频振荡有效频段内,避免gpss对其他频段的振荡造成负面影响。
[0162]
同时,gpss中配置两套gpss控制参数,可根据超低频振荡分析结果,对gpss参数进行自动切换,以更好地适应整个超低频振荡频段。
[0163]
为了便于理解,本发明中提供了一种基于振荡模式在线辨识的gpss自动投退装置的实施例,包括控制模块;
[0164]
控制模块用于执行以下步骤:
[0165]
s1、对gpss振荡模式在线辨识的第一参数进行初始化,第一参数包括当前时间标识、超低频振荡标识、超低频振荡计数器和振荡模式在线辨识计时器;
[0166]
s2、检测超低频振荡标识是否为1,若是,则跳转至步骤s8,否则跳转至步骤s3;
[0167]
s3、以当前时间为基点,取过去预置分析时间窗长度时间段的频率采样数据;
[0168]
s4、对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识;
[0169]
s5、根据振荡模式在线辨识结果判断是否满足超低频振荡条件,若是,则跳转至步骤s6,否则跳转至步骤s7;
[0170]
s6、将超低频振荡标识置1,返回步骤s2;
[0171]
s7、将当前时间标识和振荡模式在线辨识计时器均加上振荡分析滑动步长,返回步骤s3;
[0172]
s8、投入gpss功能,进行第二参数初始化,跳转至步骤s9,第二参数包括gpss连续动作计时器和gpss输出死区计数器;
[0173]
s9、以当前时间为基点,取过去预置分析时间窗长度一半的时间段的gpss输出量采样数据;
[0174]
s10、根据gpss输出量采样数据判断是否满足gpss退出条件,若是,则跳转至步骤s12,否则跳转至步骤s11;
[0175]
s11、将当前时间标识加1,gpss连续动作计时器加1,返回步骤s9;
[0176]
s12、退出gpss功能,返回步骤s1。
[0177]
步骤s10具体包括:
[0178]
s101、分别计算gpss输出量采样数据中的正数值平均值和负数值平均值,取正数值平均值和负数值平均值中绝对值较大的作为目标平均值;
[0179]
s102、判定目标平均值的绝对值是否满足大于gpss停止死区
×
gpss最大动作时间的条件,若是,则跳转至步骤s12,否则跳转至步骤s103;
[0180]
s103、分别计算gpss输出量采样数据的最大值和最小值,跳转至步骤s104;
[0181]
s104、判定gpss输出量采样数据的最大值的绝对值是否小于gpss停止死区,且gpss输出量采样数据的最小值的绝对值是否小于gpss停止死区,若是,则判断gpss输出近似为0,已进入死区,跳转至步骤s107,否则,跳转至步骤s105;
[0182]
s105、将当前时间标识加1,gpss连续动作计时器加1,并跳转至步骤s106;
[0183]
s106、判定gpss连续动作计时器是否大于gpss最大动作时间,若是,则跳转至步骤s12,否则跳转至步骤s9;
[0184]
s107、将gpss输出死区计数器加1,跳转至步骤s108;
[0185]
s108、判定gpss输出死区计数器是否大于过去预置分析时间窗长度一半,若是,则跳转至步骤s12,否则,跳转至步骤s105。
[0186]
步骤s4中采用prony分析方法对过去预置分析时间窗长度时间段的频率采样数据进行振荡模式在线辨识。
[0187]
步骤s5包括:
[0188]
s51、记时间窗[t-tw,t]的频率采样数据的峰峰值为ppv,其中,t为当前时间标识,tw为预置分析时间窗长度;
[0189]
s52、判断ppv是否大于2倍的频率振荡死区,若是,则跳转至步骤s53,否则,跳转至步骤s511;
[0190]
s53、筛选出振荡模式在线辨识中幅值结果大于th2
×
ppv/2且排名前th3的模态,其中,th2为模态最小幅值,th3为模态数量上限;
[0191]
s54、判定筛选得到的模态中是否有频率处于模态频率下限~模态频率上限范围内的模态,若有,则跳转到步骤s55,若没有,则跳转到步骤s511;
[0192]
s55、判断频率处于模态频率下限~模态频率上限范围内的模态的阻尼比是否小于模态阻尼比阈值,若是,则跳转至步骤s56,否则跳转至步骤s511;
[0193]
s56、将超低频振荡计数器加1,并跳转到步骤s57;
[0194]
s57、判定超低频振荡计数器是否由0变1,若是,则跳转至步骤s510,否则跳转至步骤s58;
[0195]
s58、判定超低频振荡计数器是否大于振荡次数阈值,若是,则跳转至步骤s59,否则跳转至步骤s511;
[0196]
s59、将超低频振荡标识置1,跳转至步骤s2;
[0197]
s510、将振荡模式在线辨识计时器置0,跳转至步骤s511;
[0198]
s511、将当前时间标识加上振荡分析滑动步长,振荡模式在线辨识计时器加上振荡分析滑动步长,跳转至步骤s512;
[0199]
s512、判定振荡模式在线辨识计时器是否大于归零最大时间,若是,则跳转至步骤s513,否则跳转至步骤s2;
[0200]
s513、将超低频振荡计数器置0,并跳转至步骤s2。
[0201]
步骤s6具体包括:
[0202]
s61、根据振荡频率判断是否满足参数切换条件,若是,则跳转至步骤s62,否则,跳转至步骤s63;
[0203]
s62、切换gpss控制环节参数,并跳转到步骤s63;
[0204]
s63、将超低频振荡标识置1,返回步骤s2。
[0205]
本发明提供的基于振荡模式在线辨识的gpss自动投退装置,用于执行本发明提供的基于振荡模式在线辨识的gpss自动投退方法,其原理和所取得的技术效果与本发明提供的基于振荡模式在线辨识的gpss自动投退方法相同,在此不再赘述。
[0206]
以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1