一种起动-发电系统持续驻留时间下的模糊切换自抗扰控制方法
1.本发明属于起动-发电系统控制技术领域,涉及一种起动-发电系统持续驻留时间下的模糊切换自抗扰控制方法。
背景技术:
2.起动-发电系统被广泛应用于多电航空发动机、新能源汽车等领域,在飞机和电动汽车的工作过程中起着至关重要的作用。以多电航空发动机为例,为防止在转子零转速状态下喷油-点火烧伤燃烧室,需要一个起动电机拖动航空发动机的压气机升速至点火转速。此外,当发动机达到慢车转速后,发电机提取轴上功率,由发动机转子拖动,为机载用电设备供电,保障飞机电能的充足。由于起动-发电机在起动过程和发电过程中负载会发生切换,起动-发电系统具有多模态和强非线性的特点,可被视作一类切换非线性系统。因此,在针对起动-发电系统的控制研究中,传统的控制器设计方法具有一定的保守性。切换系统的控制性能不仅取决于每个子系统的性能,同时受到切换过程的严重影响。在切换系统的控制研究中,切换过程的稳定性以及干扰抑制能力是两个重点研究内容。自抗扰控制器作为一类具有主动抑制扰动能力的鲁棒控制器,被广泛应用于诸多噪声频繁的控制场合。自抗扰控制器的核心思想在将系统扰动扩张成为新的系统状态,同时设计一类扰动观测器,并在反馈控制律中进行系统扰动的主动补偿。相较于传统的鲁棒控制器,自抗扰控制器具有模型依赖性小,适用性强的特点。t-s模糊方法可以实现非线性系统的线性化。通过合理定义模糊集合并设计模糊规则,t-s模糊方法是针对复杂系统分析以及提升控制器设计有效性的重点辅助手段。针对起动-发电系统这类典型的切换非线性系统,在考虑切换特性的基础上,研究其模糊切换自抗扰控制器的设计对于保证起动-发电系统的鲁棒性具有重要意义。
3.现有的起动-发电系统控制分析大多关注于系统对于扰动的抑制能力,而忽略了负载切换过程对系统性能的影响(x.lang,t.yang,g.bai,s.bozhko and p.wheeler,"active disturbance rejection control of dc-bus voltages within ahigh-speed aircraft electric starter/generator system,"in ieee transactions on transportation electrification,vol.8,no.4,pp.4229-4241,dec.2022,doi:10.1109/tte.2022.3164351.),所设计的扰动抑制控制器具有保守性。此外,切换系统的鲁棒控制研究结果大部分考虑的是系统输出对于扰动的抑制能力,如通过确立状态和扰动之间的范数联系,得到系统具有h
∞
性能(l.long and j.zhao,"h∞control of switched nonlinear systems in p-normal form using multiple lyapunov functions,"in ieee transactions on automatic control,vol.57,no.5,pp.1285-1291,may 2012,doi:10.1109/tac.2012.2191835.)或者l
∞
性能(m.naghnaeian and p.g.voulgaris,"characterization and optimization of l∞gains of linear switched systems,"in ieee transactions on automatic control,vol.61,no.8,pp.2203-2218,aug.2016,doi:
10.1109/tac.2015.2494369.)等。然而在实际工程应用中,仅仅确保状态受扰动的影响程度远远不够系统对于鲁棒性的要求,一个具有主动抑制扰动能力的系统在实际工程中会具有更强的鲁棒性以及更快的响应速度。现存的结果几乎没有针对起动-发电系统的切换分析和模糊切换自抗扰控制研究内容,而如何保证起动-发电系统在负载切换情况下的主动抑制扰动能力则是模糊切换自抗扰控制的优势所在,同样也是本发明所关心的问题。
技术实现要素:
4.为保证起动-发电系统在负载切换条件下的主动抑制扰动能力,提升系统的鲁棒性,本发明提出一种起动-发电系统持续驻留时间下的模糊切换自抗扰控制方法,并将其应用于起动-发电系统的速度和直流电压控制之中。
5.本发明的技术方案:
6.一种起动-发电系统持续驻留时间下的模糊切换自抗扰控制方法,具体步骤如下:
7.步骤1:考虑负载切换的工作过程,得到起动-发电切换系统形式;
8.步骤2:设计t-s模糊规则,对起动-发电切换非线性系统进行模糊线性化,得到模糊起动-发电切换系统数学模型;
9.步骤3:考虑系统受扰动影响的情况下,进行模糊切换自抗扰控制器设计,包括模糊切换扩张状态观测器和模糊切换反馈控制律设计;
10.步骤4:建立动态误差系统,通过多李雅普诺夫函数设计,考虑切换过程对起动-发电系统性能的影响,在持续驻留时间的切换信号设计方案下,分别研究误差系统的稳定性以及l
∞
性能条件;
11.步骤5:提出可求解的优化条件,对模糊切换自抗扰控制器参数进行优化求解,保证起动-发电系统的稳定性、l
∞
性能和控制器的有效性;
12.步骤6:分别进行速度和直流电压回路的模糊切换自抗扰控制仿真实验,并对控制性能进行分析。
13.本发明的有益效果:本发明考虑起动-发电系统存在负载切换导致的多模态工作情况,针对切换系统的扰动抑制控制分析,提出一种模糊切换自抗扰控制器的设计方法。本发明在分析起动-发电系统对扰动抑制能力的基础上,通过设计模糊切换自抗扰控制器,进一步保证了起动-发电系统在负载切换情况下的主动抑制扰动的能力,有效提升了起动-发电系统的鲁棒性,具有一定的工程价值。
附图说明
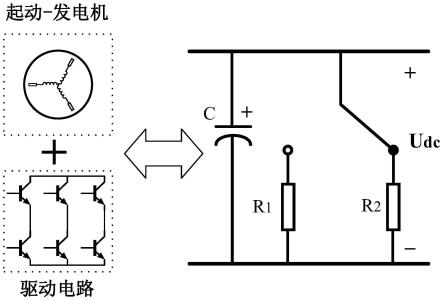
14.图1为永磁起动-发电系统结构;
15.图2为第κ阶段的持续驻留时间结构;
16.图3为所设计的系统切换信号;
17.图4为电机机械角速度控制曲线;
18.图5为起动实验下机械角速度跟踪误差和观测误差。
19.图6为直流母线电压控制曲线;
20.图7为发电实验下电压跟踪误差和观测误差。
具体实施方式
21.以下结合附图和技术方案,进一步说明本发明的具体实施方式。
22.具体实现步骤:
23.1)起动-发电切换系统建模
24.起动-发电系统的具体结构如图1所示,其中主要包括起动-发电机,具有逆变/整流功能的驱动装置和负载设备,其中在起动工况下负载表现为电机轴上所拖动的负载转矩,在发电工况下负载表现为直流电压侧的功率消耗设备,在图中以电阻的形式加以表示。
25.负载的切换会直接导致起动-发电系统的速度和直流电压控制回路呈现出切换系统的特性。在起动工况下,考虑轴接不同的负载,速度控制回路可以表示为如下所示的切换系统形式:
[0026][0027]
其中,ωm是电机的机械角速度,te是电磁转矩,t
2li
是可切换的负载转矩,i∈s表示系统模态,s是所有系统模态组成的集合,b是粘滞摩擦系数,j是转动惯量,k为给定常数。
[0028]
对于发电工况而言,考虑负载电阻值的切换,直流电压控制回路同样可以表示为切换系统的形式:
[0029][0030]
其中,u
dc
表示直流电压,i
dc
代表直流电流,ri是可切换的负载电阻,c是直流侧稳压电容,δr用于描述电阻值的波动。
[0031]
2)t-s模糊切换系统建模
[0032]
对于系统(1),给定系统参数如下:
[0033]
转动惯量:j=10-4
kg
·
m2,粘滞摩擦系数:b=10-5
,k=10-8
,电机转速范围:ωm∈[0,104)rads/min,系统模态:i∈{1,2},切换负载转矩:t
2l1
=10-5
ωm,t
2l2
=0。
[0034]
选择x=ωm,u=te,可以得到速度控制系统的具体形式为:
[0035]
·
系统模态i=1时:
[0036][0037]
·
系统模态i=2时:
[0038][0039]
为了保证控制分析和控制器设计的有效性,可以通过t-s模糊方法对系统中的非线性项-10-4
x2进行模糊线性化。首先,选择模糊规则个数为2,设置前件变量为系统状态x。由于
[0040][0041]
通过上下界的方式对非线性项进行拟合,可以得到
[0042][0043]
由式(3),可以计算得到隶属度函数
[0044]h11
(x(t))=h
21
(x(t))=10-4
x(t),
[0045]h12
(x(t))=h
22
(x(t))=1-10-4
x(t).
[0046]
因此,速度模糊切换系统可以表示为
[0047][0048]
其中,a
11
=-1.2,a
12
=-0.2,a
21
=-1.1,a
22
=-0.1,b
il
=104。
[0049]
对于系统(2),设置系统参数为:
[0050]
稳压电容:c=2mf,系统模态:i∈{1,2},可切换负载电阻值:r1=2kω,r2=1kω,电阻浮动:δr=0.4sin(u
dc
)。
[0051]
选择x=u
dc
,u=i
dc
,直流电压切换系统可以表示为:
[0052]
·
系统模态i=1时:
[0053][0054]
●
系统模态i=2时:
[0055][0056]
选择模糊规则个数为2,设置前件变量为系统状态x。通过t-s模糊方法,分别对模态1和模态2下系统内所包含的非线性项进行模糊线性化,可以得到
[0057][0058]
基于式(4),可以计算得到隶属度函数
[0059]h11
(x(t))=h
21
(x(t))=0.5+0.5sin(x(t)),
[0060]h12
(x(t))=h
22
(x(t))=1-(0.5+0.5sin(x(t)))=0.5-0.5sin(x(t)).
[0061]
因此,直流电压模糊切换系统可以表示为:
[0062][0063]
其中,a
11
=-0.35,a
12
=-0.15,a
21
=-0.7,a
22
=-0.3,b
il
=500。
[0064]
3)模糊切换自抗扰控制器设计
[0065]
基于对起动-发电切换系统的模糊建模,在考虑负载切换,经过t-s模糊线性化,考虑系统扰动的情况下,起动-发电系统具有如下的一般性形式:
[0066][0067]
其中,ω表示系统扰动。
[0068]
为保证起动-发电系统具有主动抑制扰动的能力,现对系统(5)进行模糊切换自抗扰控制器设计,控制器的具体形式如下:
[0069]
模糊切换扩张状态观测器:
[0070][0071]
模糊切换反馈控制律:
[0072][0073]
其中,r是参考信号,和分别表示x和ω的观测值,和g
il
分别是亟待优化的观测器增益和控制器增益,o
il
>0和b
il
是给定常数。
[0074]
4)系统稳定性分析
[0075]
为了便于分析控制系统的稳定性,现对误差系统进行模型建立。分别定义跟踪误差和观测误差为es=r-x和得到跟踪误差和观测误差系统具体形式为
[0076][0077][0078]
其中,
[0079]
可以将跟踪误差系统(8)和观测误差系统(9)整理成状态空间形式:
[0080][0081]
其中,e=[e
s ec]
t
,
[0082]
持续驻留时间的结构示意如图2所示。以第κ个阶段为例,持续驻留时间包括两个组成部分,分别要求系统切换必须具有不小于τ
p
的驻留时间,同时允许系统模态在区间内发生多次切换,且相邻两次切换时刻之间的间隔必须小于τ
p
。
[0083]
给定参数α>0和μ>1,若存在γ>0以及系统模态依赖的李雅普诺夫函数v
σ
(e(t)):其中为正实数域,使得对s表示系统模态的集合,且i
≠j,下述条件对均成立:
[0084][0085]vi
(e(ts))≤μvj(e(ts)),
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0086]
那么可以得到
[0087][0088]
其中,和分别表示第κ和第κ+1阶段的起始时刻,和分别表示时刻和时刻的系统模态,代表区间内总的系统模态换次数。
[0089]
若每个阶段内的驻留时间τ
p
满足τ
p
>1/fs,进一步,可以得到
[0090][0091]
其中,ts和fs分别表示t阶段的最大运行时长以及最大模态切换频率,t0表示初始时刻。
[0092]
基于式(13),可以得出结论:
[0093]
若在每个阶段内的驻留时间满足:
[0094][0095]
则当时间t足够大时,误差系统(10)在扰动f≡0的情况下一致渐近稳定。
[0096]
此外,若系统扰动f≠0,若选择李雅普诺夫函数为如下的标准二次型形式:
[0097]vi
(e)=e
t
pie,
[0098]
其中,是待求解的正定对称矩阵。
[0099]
由式(13)和式(14),可以得出动态误差系统(10)具有l
∞
扰动抑制能力,具体形式为:
[0100]
||e(t)||
∞
≤γ1||f(t)||
∞
,
[0101]
其中,λ
min
(pi)表示矩阵pi的最小特征值。
[0102]
5)控制器参数优化
[0103]
通过选择其中,pi=diag{p
1i p
2i
},易于得到下列不等式是式(11)和式(12)的充分条件
[0104][0105]
p
1i
≤μp
1j
,p
2i
≤μp
2j
,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0106]
其中,
[0107]
y=-γ2i,i=diag{1 1}。
[0108]
因此,给定参数α>0和μ>1,若存在p
1i
>0,p
2i
>0,z
1ik
,z
2ik
和γ>0,使得式(15)和式(16)成立,则动态模糊误差系统(10)一致渐近稳定且具有不超过γ1的l
∞
性能增益。此外,优化的模糊切换自抗扰控制器参数可以表示为:
[0109][0110]
6)速度控制和直流电压控制实验
[0111]
切换信号设计:对于速度控制实验,选择α=0.8,μ=1.1,t=2,f=10,由驻留时间条件(14),可知持续驻留时间下的切换信号设计应满足:
[0112][0113]
在直流电压控制实验中,选择α=0.4,μ=1.05,t=2,f=10,此时驻留时间应满足:
[0114][0115]
因此,在速度控制实验和直流电压控制实验中,切换信号均可设计为如图3所示,其中驻留时间设置为0.6s。
[0116]
在速度控制实验中,选择γ=1.8,通过求解不等式(15)和不等式(16),可以得到速度回路的模糊切换自抗扰参数为:
[0117]g11
=g
12
=7.0820,
[0118]g21
=g
22
=2.3909,
[0119][0120][0121]
给定速度期望信号ωm=9000rads/min和系统扰动ω=0.1sin(t)。速度控制仿真实验结果如图4和图5所示。由于负载转矩切换,系统呈现出多模态,且具有外部扰动的情况下,所设计的模糊切换自抗扰控制器依然能够保证系统状态能够快速跟踪设定的目标转速值。图5展示了跟踪误差和观测误差值,表明了动态误差系统具有很好的稳定性。实验结果说明所设计的模糊切换自抗扰控制器能够很好的主动抑制系统扰动,速度切换控制系统在所提方法内具有很强的鲁棒性,验证了控制器设计的有效性。
[0122]
在直流电压控制实验中,选择γ=1.8,通过求解不等式(15)和不等式(16),可以得到直流电压回路的模糊切换自抗扰控制器参数为:
[0123]g11
=g
12
=8.1872,
[0124]g21
=g
22
=1.9621,
[0125][0126][0127]
选择电压参考信号为270v,设置扰动ω(t)=0.5sin(t)。详细的实验结果如图6和图7所示。图6表明所设计的模糊切换自抗扰控制器能够保证系统状态很好的跟踪电压给定信号,实际直流电压值能够稳定在期望的270v,并不受切换过程和系统扰动的影响,电压控制系统具有很强的鲁棒性。图7分别展示了跟踪误差曲线和观测误差曲线,其中跟踪误差能够收敛到0,观测误差在小范围内波动。所设计的模糊切换自抗扰控制器和模糊扩张状态观测器具有很好的控制和扰动观测效果。
[0128]
本发明考虑起动-发电系统的负载切换,提出了一种基于持续驻留时间的模糊切换自抗扰控制方法。结果表明,所提出的模糊切换自抗扰控制器能够有效提升起动-发电系统在负载切换工况下对于扰动的主动抑制能力,增强系统的鲁棒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1