一种1700V耐压的智能功率模块的制作方法
一种1700v耐压的智能功率模块
技术领域
1.本发明涉及一种1700v耐压的智能功率模块。
背景技术:
2.如图1所示,现有的智能功率模块一般包含整流桥、brake、逆变电路、驱动电路,驱动ic有两部分,分别为hvic和lvic。
3.现有的智能功率模块主要存在如下不足:
4.由于使用hvic驱动上桥臂,ic的工艺限制最高耐压为1200v。
5.hvic和lvic的驱动能力弱,最高只能驱动35a的igbt。
6.内部没有短路保护,在短路故障时不能以最快速度关断igbt,有较大风险。
7.由于没有可控硅,用于变频控制器的模块使用时需要增加可控硅模块或者继电器来来实现电解电容的充电缓冲。
技术实现要素:
8.本发明的主要目的是为解决上述的技术问题,提供一种能够耐高压的1700v耐压的智能功率模块。
9.为实现上述目的,本发明的技术方案是:
10.一种1700v耐压的智能功率模块,包括整流电路、逆变电路,还包括四个driver ic,其中下桥臂设有一个所述driver ic,上桥臂设有三个所述driver ic;
11.所述逆变电路为由六路igbt组成的三相逆变电路;
12.上桥臂的三个单通道的driver ic,用于根据输入端口hin1、hin2、hin3的信号来控制增强驱动能力电路的工作状态,控制上桥臂三路igbt的开关状态;
13.下桥臂的一个三通道的driver ic,用于根据输入端口lin1、lin2、lin3的信号来控制增强驱动能力电路的工作状态,控制下桥臂三路igbt的开关状态。
14.进一步,每路所述driver ic的信号输出端分别通过增强驱动能力电路与所述igbt的基极电路连接。
15.进一步,所述增强驱动能力电路包括mos管q1、mos管q2,所述mos管q1、mos管q2的栅极分别与所述driver ic的信号输出端连接,所述mos管q1的漏极与所述driver ic的供电正极端连接,所述mos管q1的源极与所述igbt的基极连接,所述mos管q2的漏极与所述igbt的基极连接,所述mos管q2的源极与所述driver ic的供电负极端连接。
16.进一步,所述mos管q1、mos管q2的栅极通过电阻r3与所述driver ic的信号输出端连接,所述mos管q1的源极通过电阻r2与所述igbt的基极连接,所述mos管q2的漏极通过电阻r5与所述igbt的基极连接。
17.进一步,所述mos管q1的源极通过电阻r1与电阻r3连接,所述mos管q2的漏极通过电阻r4与电阻r3连接。
18.进一步,在所述driver ic的供电正极端与igbt的基极之间设置有肖特基二极管
d1。
19.进一步,在所述igbt的基极与driver ic的供电负极端之间设置有电容c2、电阻r6。
20.进一步,在所述driver ic的信号输入端与igbt的集电极之间设置有短路保护电路。
21.进一步,所述整流电路的输出端与可控硅的输入端连接。
22.进一步,还包括有过温保护电路,所述过温保护电路的信号输出端连接所述driver ic的itrip引脚连接。
23.综上内容,本发明所述的一种1700v耐压的智能功率模块,共使用四个driver ic,其中下桥臂一个,上桥臂三个,解决单芯片驱动耐压不够的问题。driver ic与igbt之间有增强驱动能力电路,最高可驱动100a的igbt可靠工作,解决了driver ic驱动igbt时电流不足问题,同时还能保证输出电压摆幅为0-15v满摆幅。高压智能功率模块应用时所必须的上电缓冲功能的可控硅单元、高压侧供电电路,也被集成在本智能功率模块中,可以节省电力电子设备的空间和成本。
附图说明
24.图1是现有技术的示意图;
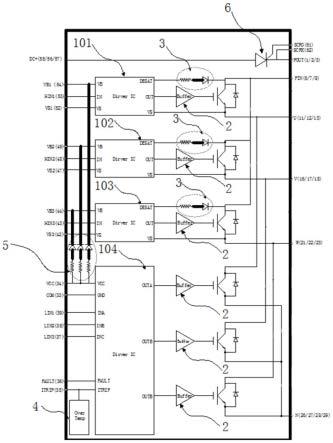
25.图2是本发明的结构示意图;
26.图3是本发明增强驱动能力电路示意图;
27.图4是本发明上桥臂driver ic外部电路示意图;
28.图5是本发明下桥臂driver ic外部电路示意图。
29.如图1至图5所示,driver ic101、driver ic102、driver ic103、driver ic104、增强驱动能力电路2、短路保护电路3、过温保护电路4、自举电路5、可控硅6。
具体实施方式
30.下面结合附图与具体实施方式对本发明作进一步详细描述:
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
32.如图2所示,一种1700v耐压的智能功率模块,主要包括整流电路、逆变电路、驱动芯片,其中驱动芯片采用四个driver ic,下桥臂设有一个driver ic104,上桥臂设有三个driver ic,分别是driver ic101、driver ic102、driver ic103。
33.上桥臂的三个单通道的driver ic,其作用是根据输入端口hin1、hin2、hin3的信号来控制增强驱动能力电路2的工作状态,信号经过增强驱动能力处理后可以控制上桥臂三路igbt的开关状态,上桥臂的三个driver ic在出现异常状态时关闭igbt。
34.下桥臂的一个三通道的driver ic,其作用是根据输入端口lin1、lin2、lin3的信号来控制增强驱动能力电路的工作状态,信号经过增强驱动能力处理后可以控制下桥臂三路igbt的开关状态。外来有效信号输入到itrip脚时,关闭igbt,并使输出端口fault输出故障信号。
35.如图4所示,上桥臂driver ic的1脚和6脚短接,之后引出到智能功率模块电路的vb脚(电源+),上桥臂的三个driver ic分别对应vb1、vb2、vb3脚。2脚和3脚短接,之后引出到智能功率模块电路的vs脚,其作用是电路的电源-,上桥臂的三个driver ic分别对应vs1、vs2、vs3脚。3脚和6脚之间并联一个电容c1,电容c1的作用是作为driver ic101、driver ic102、driver ic103电源的去耦电容。4脚引出到智能功率模块电路的hin脚,作用是driver ic101、driver ic102、driver ic103的驱动信号输入,上桥臂的三个driver ic分别对应hin1、hin2、hin3脚。5脚连接增强驱动能力电路2,其作用是driver ic101、driver ic102、driver ic103的输出信号,控制增强驱动能力电路2的工作状态。8脚连接串联的电阻r1、二极管d1、二极管d2,二极管d2的阴极连接igbt的集电极,8脚与gnd之间设置有一个电容c5,电路作用是检测igbt的工作状态,如果检测到igbt退饱和状态,则关断igbt。关断延时由c5容量决定,计算公式为t=6.5*c5/270(电容单位是微法)。7脚悬空。
36.如图5所示,下桥臂driver ic的1脚是电源正极,12脚是电源地,1脚与12脚之间并联耦合电容c14,其作用是作为driver ic104的去耦电容。2脚、3脚、4脚分别引出到智能功率模块电路的lin脚,作用是driver ic104的驱动信号输入。5脚的功能是使能控制,电压等于0v时,使driver ic104的输出为0,电压等于5v时,使driver ic104正常工作。电路接法是5脚与1脚短接,并接到电源端vcc。6脚直接引出到模块引脚fault,其作用是当driver ic104检测到欠压和过流故障以后,6脚由5v输出变为0v输出。7脚、8脚、10脚未使用。9脚和11脚分别是driver ic104内部的比较器同相输入端、反相输入端,其中9脚直接引出到模块引脚itrip,11脚接电压基准电路,用于过流保护。16脚通过电容c16接地,用于欠压保护电压设定。
37.逆变电路为由六路igbt组成的三相逆变电路,igbt并联快恢复二极管,上桥臂的三个driver ic的信号输出端分别连接一路igbt的基极,下桥臂的一个所述driver ic的信号输出端连接三路igbt的基极。每路igbt的基极分别通过增强驱动能力电路2与driver ic的信号输出端连接,增强驱动能力电路2作用是功率放大,为igbt开通和关断提供足够大的驱动电流。
38.如图3所示,增强驱动能力电路2包括mos管q1、mos管q2、电阻r1、电阻r2、电阻r3、电阻r4、电阻r5电阻r6、肖特基二极管d1、电容c2。
39.mos管q1、mos管q2的栅极通过电阻r3与所述driver ic的信号输出端连接,mos管q1的漏极与driver ic的供电正极端连接,mos管q1的源极通过电阻r2与所述igbt的基极连接,mos管q2的漏极通过电阻r5与所述igbt的基极连接,mos管q2的源极与所述driver ic的供电负极端连接。mos管q1、mos管q2的作用是功率放大,电阻r2、电阻r3、电阻r5的作用是限制电流大小。
40.mos管q1的源极通过电阻r1与电阻r3连接,mos管q2的漏极通过电阻r4与电阻r3连接。在driver ic的供电正极端与igbt的基极之间设置有肖特基二极管d1。在igbt的基极与driver ic的供电负极端之间设置有电容c2、电阻r6。电阻r1、电阻r4的作用是增加输出电压摆幅。肖特基二极管d1的作用是电压箝位,使igbt的栅极电压不高于vdd。
41.增强驱动能力电路2采用两个互补的mos管,最高输出峰值电流可达8a,可驱动100a的igbt且igbt开关损耗更低。输出电压摆幅为0-15v满摆幅,相比于非满摆幅电路,igbt正常工作时损耗更小,在短路故障发生时,igbt的短路电流也更小,所以使得igbt短路
保护更可靠。
42.在driver ic的信号输入端与igbt的集电极之间设置有短路保护电路3,短路保护电路3的作用是通过实时检测igbt的发射极和集电极之间电压,及时关闭driver ic的输出,从而保护元件igbt不受损坏。短路保护电路3的信号端连接driver ic的itrip引脚。
43.还包括有过温保护电路4,过温保护电路4的信号输出端连接所述driver ic的itrip引脚连接。driver ic的itrip引脚同时还有检测电流信号的作用,节省了引脚资源。
44.还包括自举电路5,自举电路5包括三路,每路由二极管和电阻串联组成,分别用于为上桥臂设有三个driver ic、以及上桥臂的三个增强驱动能力电路2、三个短路保护电路3、三个igbt运行提供浮动的电源。
45.还包括可控硅6,其作用是上电缓冲自举电路,承受电压范围为0~1700v。输出端电压较高时导通,可控硅6打开后可以通过稳定的电流。可控硅6有三个引脚,分别是scra、scrg、dc+。高压智能功率模块应用时所必须的上电缓冲功能的可控硅单元、高压侧供电电路,也被集成在本智能功率模块中,可以节省电力电子设备的空间和成本。
46.本发明所述的一种1700v耐压的智能功率模块,共使用四个driver ic,其中下桥臂一个,上桥臂三个,解决单芯片驱动耐压不够的问题。driver ic与igbt之间有增强驱动能力电路,最高可驱动100a的igbt可靠工作,解决了driver ic驱动igbt时电流不足问题,同时还能保证输出电压摆幅为0-15v满摆幅。
47.如上所述,结合附图所给出的方案内容,可以衍生出类似的技术方案。但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1