一种U型Halbach复合永磁游标无磁轨直线电机
一种u型halbach复合永磁游标无磁轨直线电机
技术领域
1.本发明涉及一种直线电机,具体涉及一种u型halbach复合永磁游标无磁轨直线电机,属于电机技术领域。
背景技术:
2.近年来,工业领域对直线电机的需求量逐年上升,且增速稳定,但是直线电机永磁体所需的材料——镨钕价格却一直上涨,因而具有低磁钢、高推力密度、高效率、高精度和高可靠性的直线电机越来越受到研究者的重视。特别是对于具有长行程低成本特点的直线电机来说,其逐渐成为业界的研究热点。现有的一种长行程低成本直线电机是初级励磁型直线电机。现有初级励磁型直线电机虽然拓扑结构丰富,但其核心的单位体积推力密度指标与传统直线电机相比仍有一定距离,并且其本质上是一类双凸极结构的谐波电机,相比于传统直线电机这类基波电机,其气隙磁场谐波丰富,其定位力及推力波动较大,以及,由于其永磁体与电枢绕组同时位于初级侧,故而相比于传统直线电机还更容易饱和。另外,现有直线电机还普遍存在漏磁问题。
3.如何克服现有直线电机推力密度较低,定位力和推力波动较大,以及漏磁较多等缺陷,已经成为本领域技术人员亟待解决的难题。
技术实现要素:
4.本发明的主要目的在于提供一种u型halbach复合永磁游标无磁轨直线电机,以克服现有技术中存在的上述问题。
5.为了达到前述发明目的,本发明采用了以下方案:
6.本发明的一些实施例提供了一种u型halbach复合永磁游标无磁轨直线电机,包括动子和定子,所述动子和定子之间分布有气隙,所述动子包括动子铁芯、多个绕组和多个永磁体,所述动子铁芯包括动子轭部和多个动子齿部,多个所述动子齿部通过动子轭部相互连接,并沿动子的运动方向间隔排列;所述多个动子齿部包括多个完整的动子齿部和两个剖分一半的动子齿部,两个所述剖分一半的动子齿部分别位于动子的两个边端,多个完整的动子齿部分布于两个剖分一半的动子齿部之间,且所有的动子齿部配合构成三相电机结构。
7.在一个实施例中,所述动子和定子沿动子的运动方向的法向装配。
8.在一个实施例中,所述动子中的绕组分布为整距绕组。
9.在一个实施例中,所述动子还包括多组u型聚磁单元,每一组u型聚磁单元安装于相应一个动子齿部的极靴处,且每一组u型聚磁单元包括由多个永磁体组合形成的u型halbach磁体阵列,多个所述永磁体的充磁方向均指向u型聚磁单元的中心处,所述u型聚磁单元的开口端靠近所述气隙。
10.在一个实施例中,所述u型聚磁单元还包括软磁体,多个所述永磁体围绕所述软磁体设置。
11.在一个实施例中,所述u型聚磁单元包括第一永磁体、第二永磁体、第三永磁体、第四永磁体和第五永磁体;
12.所述第二永磁体与第三永磁体对称分布于第一永磁体两侧,且所述第二永磁体和第三永磁体充磁方向均与第一永磁体的充磁方向成45
°
角;
13.所述第四永磁体和第五永磁体对称分布于第一永磁体,并且所述第四永磁体和第五永磁体的充磁方向相反,以及,所述第四永磁体的充磁方向垂直于第一永磁体的充磁方向。
14.在一个实施例中,所述动子铁芯包括多个完整的动子齿部和两个剖分一半的动子齿部,多个完整的动子齿部分布于两个剖分一半的动子齿部之间,且所有的动子齿部配合构成三相电机结构。
15.在一个实施例中,两个所述剖分一半的动子齿部分别位于动子的两个边端。
16.在一个实施例中,所述定子具有多个定子齿部,多个所述定子齿部沿动子的运动方向间隔排列。
17.在一个实施例中,所述定子齿部之间的距离为极距l1,且l1与定子有效齿数ns相乘得到的定子长度l2和动子运动过程中重叠长度l相等,即满足:ns*l1=l2=l。
18.在一个实施例中,所述直线电机的电机永磁体有效极对数n
pm
、定子有效齿数ns以及电机绕组有效极对数p之间的关系为:p=|n
pm-ns|。
19.在一个实施例中,所述定子具有无磁轨结构。
20.在一个实施例中,所述动子铁芯及定子均包括由硅钢片层叠构成的结构。
21.与现有技术相比,本发明至少具有如下优点:
22.其一,通过采用动子齿部来作为动子的边端,可以在不改变永磁体用量的情况下,明显提高电机的平均推力,有效降低定位力与推力波动,提高电机的定位精度。
23.其二,通过将永磁体与绕组设置在动子内,可以避免在定子上大量铺设永磁体,使得电机工作时所需的永磁体即为初级所对应的永磁体,显著提高了永磁体的利用率。
24.其三,通过采用无磁轨结构的定子,可以有效简化直线电机的结构,使之易于实现低成本、长行程的设计,并明显提升电机的安全性能,减少维护成本。
25.其四,通过在电机的动子内设置u型聚磁单元,利用其聚磁效应,可以大幅提高定子与动子之间气隙内的有效磁通密度,相比于现有的磁通反向型和游标型直线电机,显著增大了绕组的永磁磁通,从而有效改善直线电机的推力密度,使电机获得低磁钢,高推力的优良性能。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
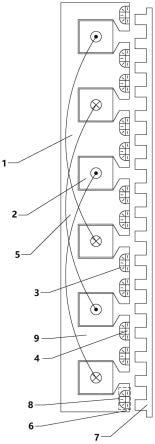
27.图1是本发明实施例中一种动子的结构示意图;
28.图2a-图2d分别是本发明实施例中四种u型聚磁单元的结构示意图;
29.图3a-图3c分别是本发明实施例中三种定子齿部的结构示意图;
30.图4是本发明实施例中一种u型halbach复合永磁游标无磁轨直线电机的立体图;
31.图5是现有直线电机剖分方式所构成的结构示意图;
32.图6是现有直线电机的空载反电势波形图;
33.图7是本发明实例中一种u型halbach复合永磁游标无磁轨直线电机的空载反电势波形图;
34.附图标记说明:动子铁芯1、绕组2、永磁体3、软磁体4、动子轭部5、完整的动子齿部6、定子7、u型聚磁单元8、剖分一半的动子齿部9、灌胶树脂10、霍尔传感器灌胶体20、霍尔引出线30、定子铁芯40、定子铁芯定位板50、动力电缆60、温度传感器电缆70、动子连接条80。
具体实施方式
35.为使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明的具体实施方式进行详细说明。这些优选实施方式的示例在附图中进行了例示。附图中所示和根据附图描述的本发明的实施方式仅仅是示例性的,并且本发明并不限于这些实施方式。
36.在此,还需要说明的是,为了避免因不必要的细节而模糊了本发明,在附图中仅仅示出了与根据本发明的方案密切相关的结构和/或处理步骤,而省略了与本发明关系不大的其他细节。
37.本实施例提供的一种u型halbach复合永磁游标无磁轨直线电机包括动子和转子,动子和定子沿动子的运动方向(如下简称运动方向)的法向装配,两者之间有气隙存在。
38.请参阅图1所示,在本实施例中,所述动子包括动子铁芯1、绕组2以及永磁体3等。动子铁芯可以由硅钢片(如dw360-50硅钢片)叠加构成,并可包括若干动子齿部和动子轭部5,这些动子齿部通过动子轭部5相互连接,且相邻动子齿部于运动方向上的间距为固定值或非固定值。示例性的,这些动子齿部可以包括五个完整的动子齿部9和两个剖分一半的动子齿部6,每个剖分一半的动子齿部6可以由一个完整的动子齿部9沿其中心线对称剖分形成,两个剖分一半的动子齿部6分布在五个完整的动子齿部9的两侧,且所有动子齿部组合构成三相电机,其绕组的连接方式为整距绕组,从而可以加载更高的负载电流,提高电机的槽满率,进而提高电机的平均推力。本实施例中采用两个剖分一半的动子齿部6作为动子的边端,还可以在不改变永磁体用量的情况下,提高平均推力,降低定位力和推力波动,克服现有游标电机双凸极结构所带来的高推力波动等缺陷,提高电机的稳定性和精度。
39.更为直观的,请参阅图5,现有的一种直线电机所采用的是初级相邻电枢齿间的剖分方式。而请再次参阅图1,本技术所采用的是初级电枢齿中间位置的剖分方式,其效果等同于在现有直线电机的两端增加一段辅助齿,从而降低双凸极结构所带来的推力波动,比现有直线电机推力波动降低了至少30%。
40.从工作原理上来说,由于直线电机等同于将旋转电机沿径向切开,并将圆周展成直线结构,导致直线电机结构和磁路的不连续,即所谓的“端部效应”。相较于现有直线电机结构中的绕组方式,在本实施例提供的电机中a相线圈总匝数不变,并将两组a相线圈合并一组,b、c相线圈可以保持不变。参阅图6和图7,将现有直线电机的空载反电势波形图与本实施例直线电机的空载反电势波形图相比较,可以看到,本实施例中的a相绕组可以避免磁路的不连续性,保证a相空载反电势与b、c相空载反电势对称,降低直线电机端部效应的影响,最终降低直线电机的推力波动。
41.在本实施例中,绕组2的线圈线径可以依据实际需要而定,例如可以设置为1.57mm左右,或者更大或更小。而且,本实施例中通过将永磁体3与绕组2放置在动子上,无须在定子上大量铺设永磁体,使得电机工作时所需的永磁体即为初级所对应的永磁体,显著提高了永磁体的利用率。
42.进一步的,每个动子齿部上安装有不少于一组u型聚磁单元。优选的,每个完整的动子齿部5安装有两组u型聚磁单元8,每个剖分一半的动子齿部6则安装有一组u型聚磁单元8。各u型聚磁单元位于相应动子齿部的极靴处。其中,每个u型聚磁单元8包含了多个永磁体3和用于固定这些永磁体安装位置的软磁体4,且每一组u型聚磁单元包括由多个永磁体组合形成的u型halbach磁体阵列,多个永磁体的充磁方向均指向u型聚磁单元的中心处,所述u型聚磁单元的开口端靠近所述气隙,如此可以使靠近气隙部分磁通密,远离气隙部分磁通疏。
43.示例性的,请再次参阅图1,每个u型聚磁单元8包含有五个永磁体3和一个软磁体4,其整体的充磁方向为指向聚磁单元中心处。该五个永磁体和一个软磁体可以具有多种形状,例如可以参阅图2a-图2c。进一步的,该五个永磁体中有一个于垂直方向充磁的永磁体,其可以定义为第一永磁体,还有两个沿水平方向充磁且充磁方向相反的永磁体,其对称分布在第一永磁体两侧,可以分别被定义为第二、第三永磁体,剩余两个永磁体也对称分布在第一永磁体两侧,且沿斜向下45
°
角方向充磁,可以分别被定义为第四、第五永磁体。这些永磁体的充磁方向如图2a-图2d中的相应箭头所示。每一u型聚磁单元中心处设置一个所述软磁体,其可以是铁芯材料,且前述五个永磁体分别与该软磁体相触,以保证u型聚磁单元内的永磁体位置不发生改变,并用于引导磁力线通过。从充磁方向可以看出,由于五个永磁体组合后都朝一个方向聚磁,因此具有显著的聚磁效果,可以有效降低漏磁系数,大幅增加气隙有效磁通密度,显著提高永磁体所产生磁通的利用率,进而显著提高电机的推力密度,实现低磁钢、高推力的优良性能。
44.在本实施例中,前述永磁体可以采用市售的多种永磁体,例如可以采用牌号为n52h的永磁体。
45.在本实施例中,所述定子可以由硅钢片(如牌号为dw360-50的硅钢片)叠加而成,并可以具有若干个定子齿部,这些定子齿部沿着运动方向排列,相邻定子齿部之间的距离可以遵循如下原则设置,即:保证所述定子齿部之间的距离(即为极距l1)与定子有效齿数ns相乘得到的定子长度l2和动子运动过程中重叠长度l相等,即满足ns*l1=l2=l,可以使得定子有效齿数满足产生“磁齿轮效应”所需的要求。
46.特别是,在本实施例中,所述直线电机的电机永磁体有效极对数n
pm
、定子有效齿数ns以及电机绕组有效极对数p成特定的数学关系:p=|n
pm-ns|,从而更好地满足产生“磁齿轮效应”的要求,进而实现低速、大推力特性,产生最大波长有效谐波。
47.前述定子齿部可以多种形态的,例如可以为图3a所示的斜齿结构、图3b所示的中心对称的斜齿结构或图3c所示的直齿结构等,且不限于此。
48.进一步的,本实施例中的定子采用无磁轨结构,其结构简单,能很容易地实现长行程、低成本的设计,并且相比于在定子上铺设永磁体的结构,安全性能明显提高,利于大幅减少维护成本。
49.在本实施例中,所述直线电机还可以包括除了动子、定子以外的组件。示例性的,
请参阅图4所示,所述直线电机还可以包括灌胶树脂10、霍尔传感器灌胶体20、霍尔引出线30、动力电缆60、温度传感器电缆70、动子连接条80等。其中动子可被灌胶树脂10所封装,其顶部可以连接动子连接条80,以供连接负载设备。在动子的封装结构内还可以设置温度触感器等进行监控,绕组2、温度传感器可以分别通过动力电缆60、温度传感器电缆70与外部电源、控制设备等电连接,同时可以设置与动子封装结构连接的霍尔传感器灌胶体20,再通过霍尔引出线30将其与控制设备等电连接。定子还可以包括彼此固定连接的定子铁芯40和定子铁芯定位板50等,定子齿部可以沿运动方向间隔设置在定子铁芯40上。
50.应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例的技术方案也可以经适当组合形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1