一种架空线路带电导线修补设备的挂拆装置的制作方法
本发明涉及架空线路带电导线修补,具体为一种架空线路带电导线修补设备的挂拆装置。
背景技术:
1、随着电力的发展,城市内的架空线路也实现的较高的绝缘化率,由于绝缘导线运行在露天的环境下,随着运行时间的增长,绝缘导线易出现绝缘皮破损的情况。当绝缘导线出现破损情况时,带电的金属就会裸露在外,如果有异物如树枝、塑料袋等飘落,易引起短路跳闸,严重的会造成大面积停电事故,因此有必要对加工线路进行巡检和破损修复,修补方式包括人工修补和机器人修补,由于高空带电作业风险较大,机器人修补逐渐取代人工修补,而机器人在对带电线路进行修补时,同常通过无人机将将装有机器人的挂拆装置吊住架空线路的地线悬挂处,然后由人工辅助将挂拆装置悬挂至架空线路的地线上,然后挂拆装置沿架空线路的地线进行行走移动至修补处进行修补,这种挂拆装置依旧需要人工进行辅助,为此,我们提出了一种架空线路带电导线修补设备的挂拆装置。
技术实现思路
1、本发明要解决的技术问题是克服现有的缺陷,提供一种架空线路带电导线修补设备的挂拆装置,能够根据架空线路的地线的间距对两个弹性卡块间距自动进行调整,还能自动对弹性卡块进行限位固定,使用更加安全,在对带电导线进行修补时,能够大大提高导线修补机器人的工作范围,使用更加方便,可以有效解决背景技术中的问题。
2、为实现上述目的,本发明提供如下技术方案:一种架空线路带电导线修补设备的挂拆装置,包括固定板和安装板;
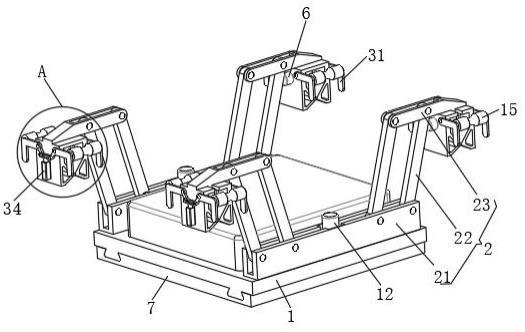
3、固定板:其上表面前后两端对称设置有调节机构,调节机构的上端均对称设有弹性卡块,弹性卡块的内部上端均转动连接有行走轮,横向对应的弹性卡块相对内侧面均设有行走电机,行走电机的输出轴穿过弹性卡块上端的通口并与同侧对应的行走轮固定连接;
4、安装板:通过前后对称设置的燕尾滑条横向滑动连接于固定板的底面;
5、其中:所述固定板的上表面分别设置有电池、控制器和信号接收器,控制器的输入端电连接电池的输出端,行走电机的输入端电连接控制器的输出端,信号接收器的输出端电连接控制器的输入端,能够根据架空线路的地线的间距对两个弹性卡块间距自动进行调整,还能自动对弹性卡块进行限位固定,使用更加安全,在对带电导线进行修补时,能够大大提高导线修补机器人的工作范围,使用更加方便。
6、进一步的,所述调节机构包括凹槽板、连杆和安装杆,所述凹槽板前后对称设置于固定板的上表面,凹槽板的内部左右两端均对称转动连接有连杆,相邻的两个连杆上端均与安装杆的开口内壁转动连接,四个安装杆的外侧端头均设有弹性卡块,靠近固定板纵向中心处的四个连杆下端均等角度设有齿牙槽,凹槽板的内部均对称滑动连接有齿条板,齿条板分别与同侧对应的齿牙槽啮合,方便根据架空线路的地线的间距对两个弹性卡块间距自动进行调整。
7、进一步的,所述凹槽板的中部均设置有双轴电机,双轴电机的两个输出轴端头均设有丝杆,丝杆分别与同侧对应的齿条板中部设置的螺纹孔螺纹连接,双轴电机的输入端电连接控制器的输出端,为齿条板的移动提供驱动力。
8、进一步的,所述丝杆的个数为四个,位于同一个凹槽板内部的两个丝杆螺纹方向相反,保证齿条板同步反向移动。
9、进一步的,所述弹性卡块的下端开口处均呈梯形设置,弹性卡块的外侧面均设置有与弹性卡块配合的限位机构,方便对弹性卡块进行限位。
10、进一步的,所述限位机构包括限位架,所述限位架前后对称转动连接于弹性卡块的外侧面,限位架下端的直角延长杆与弹性卡块配合设置,能够使弹性卡块与架空线路的地线连接更加稳固。
11、进一步的,所述限位机构还包括驱动轴、条形框板和电动推杆,所述电动推杆分别设置于横向对应的两个弹性卡块相背离外侧面,电动推杆的上端均设有条形框板,限位架旋转端头的延长端均设有与条形框板配合的驱动轴,电动推杆的输入端电连接控制器的输出端,为限位架的转动提供驱动力。
12、进一步的,所述限位架的中部均设有橡胶限位轮,橡胶限位轮的中部均设有弧形凹槽,方便对固定板的位置进行固定。
13、进一步的,所述安装板的中心处设有条形口,固定板的上表面中部设有调节电机,调节电机的输出轴穿过固定板中部的避让孔并在下端设有齿轮,条形口的后侧内壁均与设有与齿轮啮合的齿牙,调节电机的输入端电连接控制器的输出端,能够大大提高导线修补机器人的工作范围。
14、与现有技术相比,本发明的有益效果是:本架空线路带电导线修补设备的挂拆装置,具有以下好处:
15、1、控制器控制双轴电机工作带动丝杆转动,进而带动与丝杆螺纹连接的齿条板沿凹槽板同步反向移动,通过连杆下端的齿牙槽带动对应的连杆转动,同侧对应的两个连杆与凹槽板和安装杆形成平行四边形,连杆转动能够对安装杆的左右位置进行调节,能够根据架空线路的地线的间距对两个弹性卡块间距自动进行调整,由于弹性卡块的下端开口呈梯形设置,方便弹性卡块与架空线路的地线悬挂点配合卡接,便于固定板的自动悬挂安装。
16、2、固定板在悬挂后,控制器控制电动推杆工作,电动推杆的伸缩端向上伸出使条形框板向上移动,通过位于条形框板内部的驱动轴带动位于同一个弹性卡块外侧的限位架相对转动,使限位架下端的直角延长杆与弹性卡块的外侧面接触,从而限制弹性卡块发生弹性形变,使弹性卡块与架空线路的地线连接更加稳固,当导线修补机器人到达带电线路的修补位置时,电动推杆继续推动条形框板向上移动,使位于同一个弹性卡块外侧的限位架继续相对转动,直至限位架中部的橡胶限位轮与架空线路的地线接触,由于橡胶限位轮的中部均设有弧形凹槽,能够使橡胶限位轮与架空线路的地线接触面积更大,从而对固定板的位置进行固定,方便后续对带点导线进行修补。
17、3、修补时,控制器控制调节电机工作,通过齿轮和条形口内壁的齿牙,带动安装板左右调节,能够大大提高导线修补机器人的工作范围,使用更加方便。
技术特征:
1.一种架空线路带电导线修补设备的挂拆装置,其特征在于:包括固定板(1)和安装板(7);
2.根据权利要求1所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述调节机构(2)包括凹槽板(21)、连杆(22)和安装杆(23),所述凹槽板(21)前后对称设置于固定板(1)的上表面,凹槽板(21)的内部左右两端均对称转动连接有连杆(22),相邻的两个连杆(22)上端均与安装杆(23)的开口内壁转动连接,四个安装杆(23)的外侧端头均设有弹性卡块(4),靠近固定板(1)纵向中心处的四个连杆(22)下端均等角度设有齿牙槽(221),凹槽板(21)的内部均对称滑动连接有齿条板(14),齿条板(14)分别与同侧对应的齿牙槽(221)啮合。
3.根据权利要求2所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述凹槽板(21)的中部均设置有双轴电机(12),双轴电机(12)的两个输出轴端头均设有丝杆(13),丝杆(13)分别与同侧对应的齿条板(14)中部设置的螺纹孔螺纹连接,双轴电机(12)的输入端电连接控制器(10)的输出端。
4.根据权利要求3所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述丝杆(13)的个数为四个,位于同一个凹槽板(21)内部的两个丝杆(13)螺纹方向相反。
5.根据权利要求1所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述弹性卡块(4)的下端开口处均呈梯形设置,弹性卡块(4)的外侧面均设置有与弹性卡块(4)配合的限位机构(3)。
6.根据权利要求5所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述限位机构(3)包括限位架(31),所述限位架(31)前后对称转动连接于弹性卡块(4)的外侧面,限位架(31)下端的直角延长杆与弹性卡块(4)配合设置。
7.根据权利要求6所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述限位机构(3)还包括驱动轴(32)、条形框板(33)和电动推杆(34),所述电动推杆(34)分别设置于横向对应的两个弹性卡块(4)相背离外侧面,电动推杆(34)的上端均设有条形框板(33),限位架(31)旋转端头的延长端均设有与条形框板(33)配合的驱动轴(32),电动推杆(34)的输入端电连接控制器(10)的输出端。
8.根据权利要求6所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述限位架(31)的中部均设有橡胶限位轮(15),橡胶限位轮(15)的中部均设有弧形凹槽。
9.根据权利要求1所述的一种架空线路带电导线修补设备的挂拆装置,其特征在于:所述安装板(7)的中心处设有条形口(71),固定板(1)的上表面中部设有调节电机(8),调节电机(8)的输出轴穿过固定板(1)中部的避让孔并在下端设有齿轮(81),条形口(71)的后侧内壁均与设有与齿轮(81)啮合的齿牙,调节电机(8)的输入端电连接控制器(10)的输出端。
技术总结
本发明公开了一种架空线路带电导线修补设备的挂拆装置,包括固定板和安装板;固定板:其上表面前后两端对称设置有调节机构,调节机构的上端均对称设有弹性卡块,弹性卡块的内部上端均转动连接有行走轮,横向对应的弹性卡块相对内侧面均设有行走电机,行走电机的输出轴穿过弹性卡块上端的通口并与同侧对应的行走轮固定连接;安装板:通过前后对称设置的燕尾滑条横向滑动连接于固定板的底面;其中:所述固定板的上表面分别设置有电池、控制器和信号接收器,该架空线路带电导线修补设备的挂拆装置,能够根据架空线路的地线的间距对两个弹性卡块间距自动进行调整,还能自动对弹性卡块进行限位固定,使用更加安全。
技术研发人员:李俊明,毛锋,任喜军,张大林,周同兴,张勇,王娜,窦建瑞
受保护的技术使用者:国网河南省电力公司社旗县供电公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!