一种用于大型输送设备的双电机同步控制方法及系统
1.本发明属于大型输送设备传动系统中双电机同步技术领域,具体涉及一种双电机同步控制方法及控制系统。
背景技术:
2.目前,随着传动系统在众多领域的迅速发展,对双电机同步传动的要求越来越高。例如在压带式带式输送机、吊挂管状带式输送机传动系统中由于柔性变负载的实时变化及突变现象,导致双电机存在一定的转速差,严重时使得输送带张力过大,造成输送带发生撕裂,断带事故。传统的双电机系统跟踪性能和同步性能大都是在单电机恒转矩、恒功率控制方法的前提下进行的,仍存在一定地不确定性,为达到大型输送设备中双电机具备很好的同步性能,通过同轴驱动方式使得双电机同步性能存在功率、负载转矩与电机参数平衡的问题突出。
3.因此,有必要对以上技术进行改进。
技术实现要素:
4.本发明目的是提供一种双电机同步控制方法及控制系统,可有效克服现有技术存在的缺点。
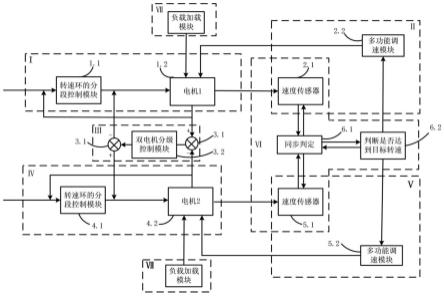
5.一种双电机同步控制方法及控制系统,其特征在于:包括单电机分段控制调速模块i和iv、单电机调速模块ii和v、双电机交叉耦合分级控制调速模块iii、双电机同步判定模块vi和负载加载模块vii;
6.所述单电机分段控制调速模块i包括转速环的单电机分段控制模块及电机模块;所述单电机调速模块ii包括速度传感器、单电机多功能调速模块;所述双电机交叉耦合分级控制调速模块iii包括交叉耦合信号输入节点、交叉耦合信号输出节点和分级调速控制模块;所述单电机分段控制调速模块iv包括转速环的单电机分段控制模块及电机模块;所述单电机调速模块v包括速度传感器、单电机多功能调速模块;所述双电机同步判定模块vi由速度传感器、速度传感器、同步判定模块及目标转速判定模块组成。
7.所述单电机分段控制模块包括if判断语句模块、滑模控制模块及pi控制模块;所述单电机分段控制模块是由外来输入信号和电机模块反馈信号的差值作为输入信号,通过if判断语句模块采用滑模控制模块或者pi控制模块对电机模块进行分段控制;
8.所述速度传感器检测电机模块的转速信号,传输至双电机同步判定模块vi;所述单电机多功能调速模块具有多种电机调速功能,即调频、调压控制功能;
9.所述交叉耦合信号输入节点将电机模块和电机模块的输出转速信号传输至分级调速控制模块,分级调速控制模块经算法调整后的信号传输至交叉耦合信号输出节点,交叉耦合信号输出节点将信号传输至单电机分段控制调速模块i和iv;所述分级调速控制模块包括if判断语句模块、滑模控制模块、pid控制模块及模糊pid控制模块;所述双电机分级控制模块将电机模块和电机模块的输出转速信号差值作为输入信号,通过if判断语句模块
采用滑模控制模块结合pi控制模块或者模糊pid控制模块对单电机分段控制调速模块i和iv进行分级控制;
10.所述单电机分段控制模块包括if判断语句模块、滑模控制模块及pi控制模块;所述单电机分段控制模块是由外来输入信号和电机模块反馈信号的差值作为输入信号,通过if判断语句模块采用滑模控制模块或者pi控制模块对电机模块进行分段控制;
11.所述速度传感器检测电机模块的转速信号,传输至双电机同步判定模块vi;所述单电机多功能调速模块具有多种电机调速功能,即调频、调压控制功能;
12.所述同步判定模块将速度传感器的转速输出信号进行判定;
13.所述负载加载模块vii可对电机模块和电机模块进行空载、突变、变负载等工况的模拟;所述负载加载模块vii作为组合输入信号分别传输至电机模块。
14.本发明优点及积极效果是:
15.1.本发明的双电机同步控制方法具备较快的响应速度,提高了双电机转速同步精度;采用分等级多控制方法相结合的方式增强了系统的转速同步性和跟踪性,提高了系统的可靠性和稳定性;根据双电机各负载的实时变化、且负载大小不一的情况下仍具备更好的同步特性,避免了同轴驱动功率平衡问题,节省了功率,降低生产成本。
16.2.通过单电机分段控制调速模块i和iv,对单电机启动状态、变负载运行状态、稳定运行状态进行分段调速控制;通过单电机调速模块ii和v,对单电机速度检测、判定是否达到目标转速及实时调速调控;通过双电机交叉耦合分级控制调速模块iii,采用交叉耦合和双电机转速差分级相结合的控制方法,提升双电机转速同步性能;通过双电机同步判定模块vi,对单电机转速检测值进行比对,判定双电机转速是否同步;负载加载模块vii是由不同工况下的负载组成,适用于突加负载、实时变负载、不同大小负载工况。
附图说明
17.图1为本发明系统结构示意图;
18.图2为本发明控制流程图;
19.图3为单电机分段控制示意图;
20.图4为交叉耦合结构分级控制示意图;
21.图5为分级分段滑模控制示意图;
22.图6为分级模糊pid控制示意图。
23.图中:i、单电机分段控制调速模块;1.1、单电机分段控制模块;1.11、if判断语句模块;1.12滑模控制模块;1.13、pi控制模块;ii、单电机调速模块;2.1、速度传感器;2.2、单电机多功能调速模块;iii、双电机交叉耦合分级控制调速模块;3.2、分级调速控制模块;3.11、交叉耦合信号输入节点;3.12、交叉耦合信号输出节点;3.21、if判断语句模块;3.22、滑模控制模块;3.23、pid控制模块;3.24、模糊pid控制模块;iv、单电机分段控制调速模块;4.1、单电机分段控制模块;4.11、if判断语句模块;4.12滑模控制模块;4.13、pi控制模块;v、单电机调速模块;5.1、速度传感器;5.2、单电机多功能调速模块;vi、双电机同步判定模块;6.1、同步判定模块;6.2、目标转速判定模块;vii、负载加载模块。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本发明是这样实现的,如图1、2所示,包括单电机分段控制调速模块i和iv、单电机调速模块ii和v、双电机交叉耦合分级控制调速模块iii、双电机同步判定模块vi和负载加载模块vii;
26.进一步地,单电机分段控制调速模块i包括转速环的单电机分段控制模块1.1及电机模块1.2;所述单电机分段控制模块1.1包括if判断语句模块1.11、滑模控制模块1.12及pi控制模块1.13;所述单电机分段控制模块1.1是由外来输入信号和电机模块1.2反馈信号的差值作为输入信号,通过if判断语句模块1.11采用滑模控制模块1.12或者pi控制模块1.13对电机模块1.2进行分段控制;如图2、3所示,当if判断语句模块1.11输入值即外来输入信号和电机模块1.2反馈信号的差值大于偏差e时,执行滑模控制算法模块1.1.2,否则执行pid算法模块1.1.3,说明此时的转速稳定,随即执行指令,其中偏差e由电机额定转速、滑模控制算法共同决定的。通过if判断语句模块1.11、滑模控制模块1.12及pi控制模块1.13使电机模块1.2有更好的动态性能和稳态运行性能。
27.进一步地,单电机调速模块ii包括速度传感器2.1、单电机多功能调速模块2.2;所述速度传感器2.1检测电机模块1.2的转速信号,传输至双电机同步判定模块vi;所述单电机多功能调速模块2.2具有多种电机调速功能,即调频、调压控制功能;当双电机同步判定模块6.1判断此时速度传感器2.1和速度传感器5.1的检测值是否相等,当转速相对稳定且达到同步时,通过目标转速判定模块6.2判断是否达到目标转速,若双电机同步时的转速未达到目标转速,则发送指令至多功能调速模块2.2使电机模块1.2达到目标转速值。
28.进一步地,双电机交叉耦合分级控制调速模块iii包括交叉耦合信号输入节点3.11、交叉耦合信号输出节点3.12和分级调速控制模块3.2;所述交叉耦合信号输入节点3.11将电机模块1.2和电机模块4.2的输出转速信号传输至分级调速控制模块3.2,分级调速控制模块3.2经算法调整后的信号传输至交叉耦合信号输出节点3.12,交叉耦合信号输出节点3.12将信号传输至单电机分段控制调速模块i和iv;所述分级调速控制模块3.2包括if判断语句模块3.21、滑模控制模块3.22、pid控制模块3.23及模糊pid控制模块3.24;所述双电机分级控制模块3.2将电机模块1.2和电机模块4.2的输出转速信号差值作为输入信号,通过if判断语句模块3.21采用滑模控制模块3.22结合pi控制模块3.23或者模糊pid控制模块3.24对单电机分段控制调速模块i和iv进行分级控制;如图4、5、6所示,双电机交叉耦合分级控制调速模块iii的双电机分级调速控制模块3.2,if判断语句模块3.21设定两电机转速差大于n时,执行滑模控制模块3.22与pid控制模块3.23相结合的控制方法,否则执行模糊pid控制模块3.24;设定值n由电机额定转速、滑模pid控制算法及模糊pid算法共同决定。通过if判断语句模块3.21、滑模控制模块3.22、pid控制模块3.23及模糊pid控制模块3.24能增强双电机的同步性。
29.进一步地,单电机分段控制调速模块iv包括转速环的单电机分段控制模块4.1及电机模块4.2;所述单电机分段控制模块4.1包括if判断语句模块4.11、滑模控制模块4.12
及pi控制模块4.13;所述单电机分段控制模块4.1是由外来输入信号和电机模块4.2反馈信号的差值作为输入信号,通过if判断语句模块4.11采用滑模控制模块4.12或者pi控制模块4.13对电机模块4.2进行分段控制;如图2、3所示,当if判断语句模块1.11输入值即外来输入信号和电机模块1.2反馈信号的差值大于偏差e时,执行滑模控制算法模块1.12,否则执行pid算法模块1.13,说明此时的转速稳定,随即执行指令,其中偏差e由电机额定转速、滑模控制算法共同决定的。通过if判断语句模块1.11、滑模控制模块1.12及pi控制模块1.13使电机模块4.2有更好的动态性能和稳态运行性能。
30.进一步地,单电机调速模块v包括速度传感器5.1、单电机多功能调速模块5.2;所述速度传感器5.1检测电机模块4.2的转速信号,传输至双电机同步判定模块vi;所述单电机多功能调速模块5.2具有多种电机调速功能,即调频、调压控制功能;当双电机同步判定模块6.1判断此时速度传感器2.1和速度传感器5.1的检测值是否相等,当转速相对稳定且达到同步时,通过目标转速判定模块6.2判断是否达到目标转速,若双电机同步时的转速未达到目标转速,则发送指令至多功能调速模块5.2使电机模块4.2达到目标转速值。通过速度传感器5.1、目标转速判定模块6.2及单电机多功能调速模块5.2使电机模块4.2在不同情况下达到目标转速。
31.进一步地,双电机同步判定模块vi由速度传感器2.1、速度传感器5.1、双电机同步判定模块6.1及目标转速判定模块6.2组成;所述双电机同步判定模块6.1将速度传感器2.1和速度传感器5.1的转速输出信号进行判定,若速度传感器2.1和速度传感器5.1的转速值不相等,则将判定信号传输至速度传感器2.1和速度传感器5.1继续检测;若速度传感器2.1和速度传感器5.1的转速值相等,则将判定信号传输至单电机多功能调速模块2.2和单电机多功能调速模块5.2;通过单电机多功能调速模块2.2和单电机多功能调速模块5.2选定的调速控制方法使其达到系统设定目标转速值;通过速度传感器2.1、速度传感器5.1和同步判定模块6.1能实时判断双电机的同步性。
32.进一步地,负载加载模块vii可对电机模块1.2和电机模块4.2进行空载、突变、变负载等工况的模拟;所述负载加载模块vii作为组合输入信号分别传输至电机模块1.2和电机模块4.2。单电机分段控制调速模块i和iv与双电机交叉耦合分级控制调速模块iii连接组成的控制方法使有效抑制抖振情况,系统有更好的稳定性和控制算法运算的时间缩减。单电机分段控制调速模块i和iv与单电机调速模块ii和v相连,通过传感器的检测与调控,两台电机都能达到目标转速,使大型输送设备节省功率,降低生产成本。
33.上面仅对本发明的较佳实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化,各种变化均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1