安全保护装置及其操作方法、BSG系统与流程
安全保护装置及其操作方法、bsg系统
技术领域
1.本发明涉及电机领域,更具体而言,本发明涉及一种用于电机的安全保护装置,包括该装置的bsg系统,以及该安全保护装置的操作方法。
背景技术:
2.随着新能源技术的发展,传统的燃油车逐渐被新能源车辆取代。在新能源车辆中,电机是能够给车辆提供动力的重要部件。例如,在混合动力车辆中,可采用普通的电励磁同步电机或永磁同步电机(permanent magnet synchronous motor,简称“pmsm”)为车辆提供动力。具体地,在bsg(belt-driven starter generator,皮带传动启动/发电一体化电机)系统中,可在发动机前端用带传动机构将pmsm电机与发动机相连接,以取代原有的发电机,从而以一体化方式为车辆提供动力。
3.对于pmsm电机,通常借助栅极驱动器(gate driver unit,简称“gdu”)控制连接电机的电桥电路来控制电机的运行。在电机的运行过程中,其电桥电路中的开关管(例如,mosfet)有可能出现失效故障。
4.在现有的电机安全保护方案中,针对电桥电路中的开关管失效故障大多按照通用的故障处理机制进行处理,缺乏专门针对开关管失效的单独安全处理机制。
技术实现要素:
5.有鉴于此,根据本发明的第一方面,提出了一种用于电机的安全保护装置,所述电机由电机控制板驱控,该电机控制板包括由低边开关管和高边开关管构成的电桥电路,根据一个可选的实施例,该安全保护装置包括:
6.栅极驱动器,所述栅极驱动器配置为识别所述电机控制板的故障并且在未识别到故障的情况下驱动所述电桥电路,所述栅极驱动器包括寄存器和故障输出引脚,在所述寄存器中存储有所述电桥电路的各个开关管的运行状况,其中,所述栅极驱动器还配置为在识别到所述电机控制板出现故障时经由所述故障输出引脚输出相应的故障信号;
7.硬件电路,所述硬件电路配置为当从所述栅极驱动器的故障输出引脚接收到故障信号时关闭所述栅极驱动器,并且以硬件控制的方式强制所述电桥电路进入freewheeling状态;以及
8.软件控制模块,所述软件控制模块配置为当从所述栅极驱动器的故障输出引脚接收到故障信号时从所述栅极驱动器的寄存器读取所述电桥电路中的各个开关管的运行状况,并基于读取结果确认所述电桥电路中是否出现开关管失效,从而以软件控制的方式使所述电桥电路进入相应的安全保护状态。
9.根据一个可选的实施例,所述软件控制模块还配置为,当接收到故障信号时禁止所述电桥电路进入asc状态。
10.根据一个可选的实施例,所述软件控制模块还配置为,在所述电桥电路中出现开关管失效的情况下,将所述电桥电路保持在freewheeling状态,以及保持禁止所述电桥电
路进入asc状态。
11.根据一个可选的实施例,所述软件控制模块还配置为,在所述电桥电路中未出现开关管失效的情况下向所述硬件电路发出复位信号,并且解除对所述电桥电路的状态控制。
12.根据一个可选的实施例,所述软件控制模块还配置为,在所述电桥电路中未出现开关管失效的情况下获取电机转速,并且基于所获取的电机转速控制所述电桥电路进入相应的安全保护状态。
13.根据一个可选的实施例,所述软件控制模块还配置为,在电机转速大于预定的阈值的情况下使所述电桥电路进入asc状态。
14.根据一个可选的实施例,所述软件控制模块还配置为,在电机转速小于或等于预定的阈值的情况下使所述电桥电路进入freewheeling状态。
15.根据本发明的第二方面,还提供了一种bsg系统,该bsg系统包括:bsg和电机控制板,该电机控制板包括如上所述的安全保护装置。
16.根据一个可选的实施例,所述电机为永磁同步电机。
17.根据本发明的第三方面,还提供了如上所述的安全保护装置的操作方法,其中,该操作方法包括如下步骤:
18.借助所述栅极驱动器识别电机控制板的故障,其中,当识别到电机控制板的故障时:
19.借助所述硬件电路关闭所述栅极驱动器,并且以硬件控制的方式强制所述电桥电路进入freewheeling状态;
20.借助所述软件控制模块从所述栅极驱动器的寄存器读取所述电桥电路的各个开关管的运行状况,并且基于读取结果确认所述电桥电路中是否出现开关管失效;以及
21.借助所述软件控制模块以软件控制的方式使所述电桥电路进入相应的安全保护状态。
附图说明
22.通过纳入本文的附图以及随后与附图一起用于说明本发明的某些原理的具体实施方式,本发明的方法所具有的其它特征和优点将变得清楚或更为具体地得以说明。
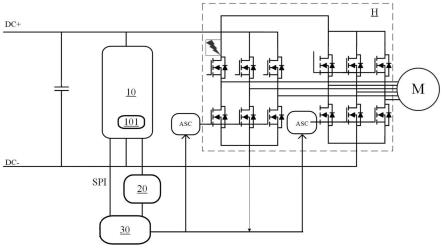
23.图1示出了根据本发明的一个示例性实施例的用于电机的安全保护装置的结构示意图。
24.图2示出了图1中所示的用于电机的安全保护装置的操作方法的各个步骤的流程图。
具体实施方式
25.下面将参照附图并通过实施例来描述根据本发明的用于电机的安全保护装置。在下面的描述中,阐述了许多具体细节以便使所属技术领域的技术人员更全面地了解本发明。但是,对于所属技术领域内的技术人员明显的是,本发明的实现可不具有这些具体细节中的一些。相反,可以考虑用下面的特征和要素的任意组合来实施本发明,而无论它们是否涉及不同的实施例。因此,下面的各个方面、特征、实施例和优点仅作说明之用而不应被看
作是权利要求的要素或限定。
26.申请人研究发现,在电机出现故障的情况下(例如,电机电桥电路的开关管失效),需要对电机执行主动保护措施以避免电机在故障情况下继续输出扭矩。其中,最为常见的两种电机主动保护措施为freewheeling(也称为safety pulse off,简称“spo”)和asc(active short circuit,简称“asc”)。freewheeling的实现方式是通过将电桥电路的开关管全部断开,asc的实现方式是通过将电桥电路的所有低边开关管(或所有高边开关管)短路。
27.在现有的电机安全保护方案中,gdu实时监测电机控制板的工作状况,当识别到开关管失效后,gdu上报该故障。软件控制模块通过读取gdu寄存器识别故障之后,会按照一般故障处理逻辑触发电桥电路的开关管全开,以使电机进入freewheeling状态;或者触发电桥电路的低边开关管短路,以使电机进入asc状态。
28.在针对开关管失效的这种故障处理方案中,使电机进入安全状态的链路过长。在电机最终进入安全状态之前,存在将近10ms左右的不可控状态,在特定工况下,可能发生电桥电路中的单个桥路的上下开关管全部导通,继而导致电机控制板的短路,从而引发系统的二次失效及高压安全风险。
29.为了降低由于电机进入安全状态的响应时间过长而造成的电机控制板的二次失效和高压安全风险,本发明提出了一种用于电机(例如,pmsm)的安全保护装置,其在电路出现故障时通过硬件和软件相结合的方式制定安全策略,以使电机进入相应的安全保护状态。具体而言,在硬件方面,在gdu的输入端增加单独的硬件电路,通过该硬件电路将gdu用于上报故障的引脚直接连接到gdu的安全状态触发引脚,以在gdu报出故障时直接触发电桥电路进入freewheeling安全状态。在软件方面,当识别到开关管失效故障以后,软件控制模块除了进行正常的故障记录以外,还同时禁止以软件方式触发电机的其他安全状态(尤其是asc状态)。
30.在介绍本发明的安全保护装置的详细结构之前,必须要说明的是,在本文中,“软件保护/以软件控制的方式提供保护”可以理解为:借助软件控制模块在执行信号采集、处理和逻辑判断等步骤之后向电桥电路输出相应的控制信号,进而控制电桥电路中各个开关管的通断,由此实现对电机的保护措施。“硬件保护/以硬件控制的方式提供保护”可以理解为:借助独立于软件控制模块的硬件电路执行信息采集、滤波处理、阈值比较等操作,并最终直接向电桥电路输出物理电信号,进而控制电桥电路中各个开关管的通断。
31.图1示出了根据本发明的一个示例性实施例的用于电机m的安全保护装置的结构示意图。电机m例如可以是永磁同步电机m(permanent magnet synchronous motor,简称“pmsm”),其可应用于混合动力车辆的bsg系统中。下文参照采用pmsm电机解决方案的bsg系统来详细介绍本发明的安全保护装置的具体结构。
32.如图1中所示,该电机m可由电机控制板驱控,该电机控制板包括两组三相电桥电路h,每组电桥电路h可以由三个低边开关管和三个高边开关管构成,各个开关管可以由mosfet构成。
33.如图1中所示,该安全保护装置还可包括栅极驱动器10(gate driver unit,简称“gdu”),该栅极驱动器10可连接至电桥电路h中的各个开关管的栅极控制端。栅极驱动器10可识别电机控制板的故障,并且在未识别到故障的情况下驱动电桥电路h。
34.栅极驱动器10可包括寄存器101和故障输出引脚(图1中未示出),在寄存器101中存储有电桥电路h的各个开关管的运行状况,例如,各个开关管的开关状态和故障信息等。其中,栅极驱动器10还配置为当识别到电机控制板出现故障时经由故障输出引脚输出相应的故障信号。
35.根据本实施例的安全保护装置的特别之处在于,其还包括硬件电路20,该硬件电路20可连接至栅极驱动器10的故障输出引脚。当从栅极驱动器10的故障输出引脚接收到故障信号时,硬件电路20可触发关闭栅极驱动器10并且以硬件控制的方式强制电桥电路h进入freewheeling状态。例如,硬件电路20可将gdu的故障引脚直接连接到gdu的安全状态触发引脚(图1中未示出),以在出现故障时直接触发电路的freewheeling状态。
36.此外,根据本实施例的安全保护装置还可包括软件控制模块30,该软件控制模块30可例如经由spi(串行外设接口)连接至栅极驱动器10的故障输出引脚以从其接收故障信号。
37.在(从栅极驱动器10的故障输出引脚)接收到关于电机控制板的故障信号之后,软件控制模块30可从栅极驱动器10的寄存器101读取电桥电路h的各个开关管的运行状况,并且基于状态读取结果确认电桥电路h中是否出现开关管失效,从而以软件控制的方式使电桥电路h进入相应的安全保护状态。作为一可选示例,当接收到故障信号时,软件控制模块30还可以软件控制的方式禁止电桥电路进入其他安全状态,特别是asc状态。
38.具体地,在电桥电路h中出现开关管失效的情况下,例如,电桥电路h中的高边开关管之一失效,软件控制模块30使电桥电路h保持在freewheeling状态,以及保持禁止电桥电路h进入其他安全状态——特别是禁止电桥电路进入asc状态——直到驾驶循环更新。
39.如果电桥电路h中未出现开关管失效,则表明由栅极驱动器10输出的故障信号与开关管失效无关,此时软件控制模块30可向硬件电路20发出复位信号,以解除对电桥电路h的状态控制。该解除具体可以包括:解除硬件电路20使电桥电路h强制进入的freewheeling状态,以及解除软件控制模块30对于禁止电桥电路h进入asc状态的限制。
40.根据一可选示例,在电桥电路h中未出现开关管失效的情况下,软件控制模块30还可以读取旋变相关信号并计算当前的电机转速,并且基于所计算得出的电机转速控制电桥电路h进入相应的安全保护状态。例如,在电机转速大于预定的阈值的情况下,使电桥电路h(特别是其低边开关管)进入asc状态。在电机转速小于或等于预定的阈值的情况下,使电桥电路h进入freewheeling状态。
41.所述预定的阈值可基于电机参数人为设定,例如,该预定的阈值可设置为电机的反电动势电压对应于电池包最小使用电压值(例如,36v)的电机转速。
42.图2示出了图1中所示的用于电机的安全保护装置的操作方法的各个步骤的流程图。下面参照图2来详细描述该安全保护装置的工作过程。
43.首先,借助gdu识别电机控制板的故障(例如,电机驱动逆变器中的开关管故障),其中,在识别到电机控制板的故障时,借助硬件电路关闭gdu,同时以硬件控制的方式强制所述电桥电路进入freewheeling状态。与此同时,作为一个可选示例,还可借助软件控制模块以软件控制的方式禁止电桥电路进入其他安全状态,例如,防止电桥电路在识别到电机控制板的其他故障时进入asc状态。
44.此外,当识别到电机控制板的故障时,借助软件控制模块从gdu的寄存器读取电桥
电路的各个开关管的运行状况,并且基于读取结果确认所述电桥电路中是否出现开关管失效。
45.随后,取决于电桥电路中是否出现开关管失效,借助软件控制模块以软件控制的方式使电桥电路进入相应的安全保护状态(例如,freewheeling状态或asc状态)。
46.具体而言,在电桥电路中出现开关管失效的情况下,借助软件控制模块使电桥电路保持在freeweeling状态,同时保持禁止电桥电路h进入其他安全状态——特别是禁止电桥进入asc状态——直到驾驶循环更新。
47.如果电桥电路中未出现开关管失效,则表明由栅极驱动器10输出的故障信号与开关管失效无关,此时可借助软件控制模块向硬件电路发出复位信号,以解除对电桥电路的状态控制(即,解除强制freeweeling状态,解除对asc状态的禁止)。
48.可选地,在电桥电路中未出现开关管失效的情况下,还可借助软件控制模块获取电机转速,并且基于电机转速控制电桥电路进入相应的安全保护状态。例如,例如,软件控制模块可经由spi总线从上层控制器旋变相关信号并基于该旋变相关信号计算当前的电机转速,可以理解的是,电机转速并不限于采用本文所列举的方式获得,而是也可以采用其他方法获得,例如,通过转速传感器测得,这些变型均落入本发明的保护范围之内。在电机转速大于预定的阈值的情况下,可使电桥电路(尤其是其低边开关管)进入asc状态;在电机转速小于或等于预定的阈值的情况下,可使电桥电路进入freeweeling状态。
49.根据本发明的安全保护装置可显著降低电机进入安全状态前的电桥电路的不可控时间——例如,可将从识别到系统故障(例如,开关管失效故障)到使电机进入安全状态的不可控时间从传统方案中的10ms降低到5us,从而降低了电桥电路二次失效的风险和电路高压的安全风险。
50.本领域技术人员可以理解的是,根据本发明的方法的各个步骤并不限于按照上述所列举的次序来实施。此外,在本发明中,“包含”和“包括”之类的用语表示除了具有在说明书和权利要求书中有直接和明确表述的步骤以外,本技术的技术方案也不排除具有未被直接或明确表述的其它步骤的情形。
51.虽然本发明已以较佳实施例披露如上,但本发明并非限于此。任何本领域技术人员,在不脱离本发明的精神和范围内所作的各种更动与修改,均应纳入本发明的保护范围内,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1