一种基于自抗扰控制器的VSG附加阻尼控制方法及系统与流程
本发明涉及电力系统,并且更具体地,涉及一种基于自抗扰控制器的vsg附加阻尼控制方法及系统。
背景技术:
1、新能源具有清洁环保等优势,使其应用范围越来越广泛,意味着会有更多的分布式电源接入大电网,且大多为就近消纳。与传统电力系统中的同步发电机(synchronousgenerator,sg)相比,分布式电源几乎不具有维持系统稳定性的旋转惯性和输出阻尼分量,其大量接入会影响电力系统的稳定性,而虚拟同步发电机(virtual synchronousgenerator,vsg)技术的提出为改善新能源特性提供了一个新思路。
2、国内外学者在完善vsg控制算法方面取得了丰硕成果,例如王安娜、何志国提出了vsg转动惯量和阻尼系数的自适应控制方法(专利号:cn201811138778.3);王跃、李明烜、周辉等人提出了基于相位前馈的虚拟同步发电机控制方法(专利号:cn201710841526.6);邹旭东、蒋秉辰、温提亮等人一种基于电压前馈补偿的虚拟同步发电机功率解耦控制方法(专利号:cn201910938123.2);李宁、张世乾、王倩和阎洁提出了一种计算下垂控制模式下虚拟同步发电机的作用电压,然后计算虚拟同步发电机的频率偏差δω,将频率偏差δω注入励磁调节器中,改造虚拟同步发电机的电压控制回路(专利号:cn202010582253.x);陈宁、胡正阳、姜达军等人基于预先建立的阻尼控制器的传递函数和同步发电机的转子角频率标幺值确定虚拟同步发电机的功率调节量标幺值,根据虚拟同步发电机的功率调节量标幺值控制虚拟同步发电机输出的有功功率(专利号:cn201911390453.9),但该方法依赖于预先设定的阻尼控制器功能,无法适应场景的多变。上述策略的改进的主要是vsg运行的自身效果,并未考虑外部电网稳定性。
技术实现思路
1、本发明提出一种基于自抗扰控制器的vsg附加阻尼控制方法及系统,以解决如何有效地进行vsg附加阻尼控制的问题。
2、为了解决上述问题,根据本发明的一个方面,提供了一种基于自抗扰控制器的vsg附加阻尼控制方法,所述方法包括:
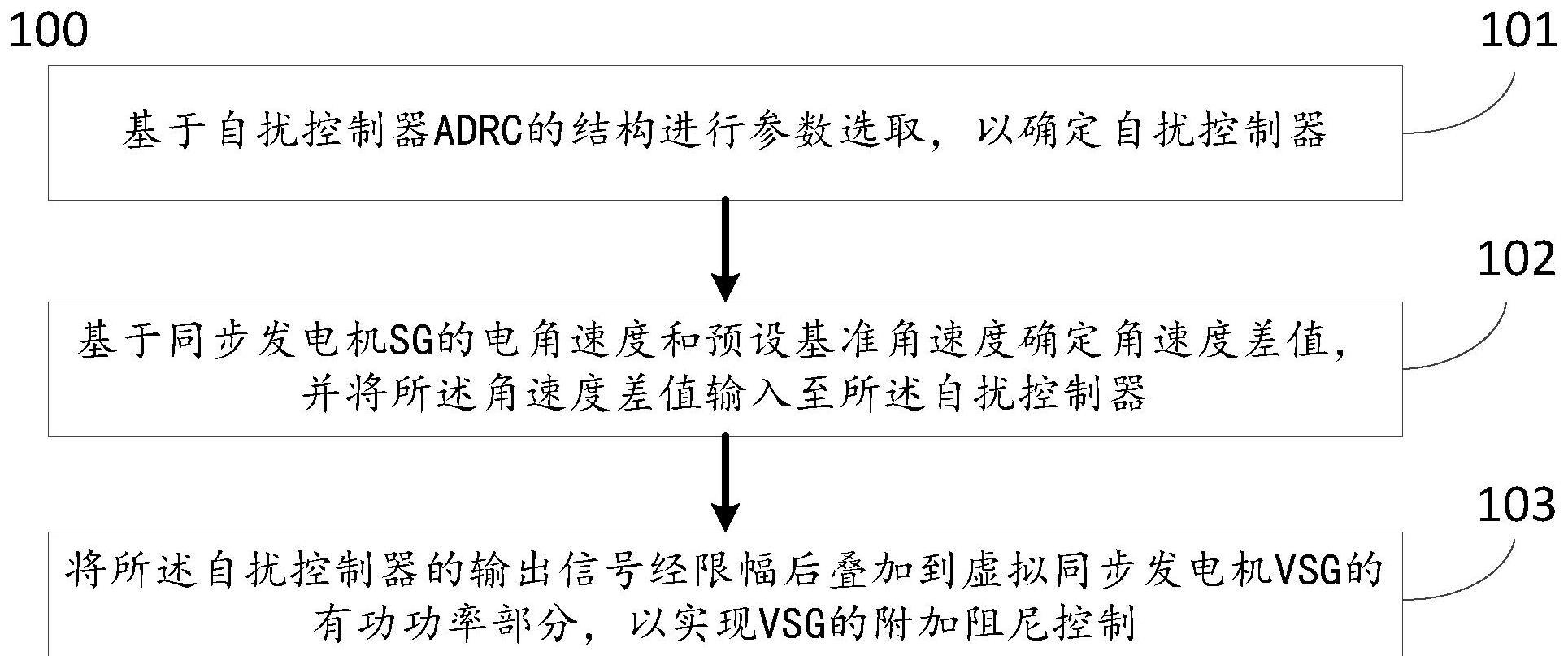
3、基于自扰控制器adrc的结构进行参数选取,以确定自扰控制器;
4、基于同步发电机sg的电角速度和预设基准角速度确定角速度差值,并将所述角速度差值输入至所述自扰控制器;
5、将所述自扰控制器的输出信号经限幅后叠加到虚拟同步发电机vsg的有功功率部分,以实现vsg的附加阻尼控制。
6、优选地,其中所述自抗扰控制器adrc的结构,包括:非线性跟踪微分器td、扩张状态观测器eso、非线性误差反馈nlsef和扰动估计补偿。
7、优选地,其中所述方法利用如下方式进行非线性跟踪微分器td的参数选取,包括:
8、根据实际仿真情况确定仿真步长h;根据控制目标确定给定的控制目标v0;根据公式r0=10-4/h2,计算速度因子r0;根据h<h0,确定滤波因子h0。
9、优选地,其中所述方法利用如下方式进行扩张状态观测器eso的参数选取,包括:
10、按照第一预设阈值确定第一幂函数指数α1;按照第二预设阈值确定第二幂函数指数α2;根据h确定线性段区间的长度δ,h为仿真步长;根据线性eso的反馈增益整定公式β01=1/h,β02=1/(2.4*h2),β03=1/(15.5*h3),分别确定第一增益系数β01、第二增益系数β02和第三增益系数β03。
11、优选地,其中所述方法利用如下方式进行非线性误差反馈nlsef的参数选取,包括:设置阻尼因子c=0.5,控制量增益r=3.6,快速因子h1=2。
12、根据本发明的另一个方面,提供了一种基于自抗扰控制器的vsg附加阻尼控制系统,所述系统包括:
13、参数确定单元,用于基于自扰控制器adrc的结构进行参数选取,以确定自扰控制器;
14、输入单元,用于基于同步发电机sg的电角速度和预设基准角速度确定角速度差值,并将所述角速度差值输入至所述自扰控制器;
15、控制单元,用于将所述自扰控制器的输出信号经限幅后叠加到虚拟同步发电机vsg的有功功率部分,以实现vsg的附加阻尼控制。
16、优选地,其中所述自抗扰控制器adrc的结构,包括:非线性跟踪微分器td、扩张状态观测器eso、非线性误差反馈nlsef和扰动估计补偿。
17、优选地,其中所述参数确定单元,利用如下方式进行非线性跟踪微分器td的参数选取,包括:
18、根据实际仿真情况确定仿真步长h;根据控制目标确定给定的控制目标v0;根据公式r0=10-4/h2,计算速度因子r0;根据h<h0,确定滤波因子h0。
19、优选地,其中所述参数确定单元,利用如下方式进行扩张状态观测器eso的参数选取,包括:
20、按照第一预设阈值确定第一幂函数指数α1;按照第二预设阈值确定第二幂函数指数α2;根据h确定线性段区间的长度δ,h为仿真步长;根据线性eso的反馈增益整定公式β01=1/h,β02=1/(2.4*h2),β03=1/(15.5*h3),分别确定第一增益系数β01、第二增益系数β02和第三增益系数β03。
21、优选地,其中所述参数确定单元,利用如下方式进行非线性误差反馈nlsef的参数选取,包括:设置阻尼因子c=0.5,控制量增益r=3.6,快速因子h1=2。
22、本发明提供了一种基于自抗扰控制器的vsg附加阻尼控制方法及系统,包括:基于自扰控制器adrc的结构进行参数选取,以确定自扰控制器;基于同步发电机sg的电角速度和预设基准角速度确定角速度差值,并将所述角速度差值输入至所述自扰控制器;将所述自扰控制器的输出信号经限幅后叠加到虚拟同步发电机vsg的有功功率部分,以实现vsg的附加阻尼控制。本发明建立基于adrc的vsg有功附加阻尼控制策略,并给出控制环节中相关参数的取值原则,并基于确定的自扰控制器进行vsg附加控制,能够提高系统稳定性。
技术特征:
1.一种基于自抗扰控制器的vsg附加阻尼控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述自抗扰控制器adrc的结构,包括:非线性跟踪微分器td、扩张状态观测器eso、非线性误差反馈nlsef和扰动估计补偿。
3.根据权利要求2所述的方法,其特征在于,所述方法利用如下方式进行非线性跟踪微分器td的参数选取,包括:
4.根据权利要求2所述的方法,其特征在于,所述方法利用如下方式进行扩张状态观测器eso的参数选取,包括:
5.根据权利要求2所述的方法,其特征在于,所述方法利用如下方式进行非线性误差反馈nlsef的参数选取,包括:设置阻尼因子c=0.5,控制量增益r=3.6,快速因子h1=2。
6.一种基于自抗扰控制器的vsg附加阻尼控制系统,其特征在于,所述系统包括:
7.根据权利要求6所述的系统,其特征在于,所述自抗扰控制器adrc的结构,包括:非线性跟踪微分器td、扩张状态观测器eso、非线性误差反馈nlsef和扰动估计补偿。
8.根据权利要求7所述的系统,其特征在于,所述参数确定单元,利用如下方式进行非线性跟踪微分器td的参数选取,包括:
9.根据权利要求7所述的系统,其特征在于,所述参数确定单元,利用如下方式进行扩张状态观测器eso的参数选取,包括:
10.根据权利要求7所述的系统,其特征在于,所述参数确定单元,利用如下方式进行非线性误差反馈nlsef的参数选取,包括:设置阻尼因子c=0.5,控制量增益r=3.6,快速因子h1=2。
技术总结
本发明公开了一种基于自抗扰控制器的VSG附加阻尼控制方法及系统,包括:基于自扰控制器ADRC的结构进行参数选取,以确定自扰控制器;基于同步发电机SG的电角速度和预设基准角速度确定角速度差值,并将所述角速度差值输入至所述自扰控制器;将所述自扰控制器的输出信号经限幅后叠加到虚拟同步发电机VSG的有功功率部分,以实现VSG的附加阻尼控制。本发明建立基于ADRC的VSG有功附加阻尼控制策略,并给出控制环节中相关参数的取值原则,并基于确定的自扰控制器进行VSG附加控制,能够提高系统稳定性。
技术研发人员:齐晓光,谢婉莹,张倩茅,陈长胜,王颖,郑力文,张丽洁,谢岩,徐田丰,王青,朱天曈,李立新,田家辉,王子琪,陈宇,赵凯林,董家盛,王骆,闫家璇
受保护的技术使用者:国网河北省电力有限公司经济技术研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!