一种三自由度悬浮的无轴承双凸极电机及其控制方法
本发明涉及无轴承双凸极电机的,尤其涉及一种三自由度悬浮的无轴承双凸极电机及其控制方法。
背景技术:
1、电励磁双凸极电机定转子结构与开关磁阻电机相似,具有较高的可靠性与鲁棒性。此外,直流励磁源激发产生的定子正交直流偏置磁场也为转子悬浮以及简化悬浮控制方法创造了条件。将无轴承技术与电励磁双凸极电机相结合,构成无轴承电励磁双凸极电机,励磁绕组产生的励磁磁通作为偏置磁场,与悬浮绕组产生的悬浮磁场叠加,导致定子两侧的气隙磁密不同,进而转子会受到径向的悬浮力,实现转子磁悬浮。这种电机结构相对简单可靠,且转子上无绕组,适合高温高速的运行环境,做发电运行时,也不需要位置传感器,只需经过不控整流电路整流即可。总的来说,无轴承电励磁双凸极电机具有很多优点,应用前景广阔。
2、无轴承电励磁双凸极电机中的悬浮绕组为直流电,且悬浮绕组产生的磁场正交,互感为零,故障可退磁,因此无轴承电励磁双凸极电机磁悬浮控制性能较为优异。但普通的无轴承电励磁双凸极电机无法实现轴向悬浮控制,削弱了无轴承电励磁双凸极电机本体可靠的重要优势,因此如何增加轴向悬浮力亟需研究。专利cn201510360500.0公开了一种电磁式无轴承双凸极电机及其悬浮力解耦控制方法,该电机空间径向相对位置上的悬浮线圈连接后分别形成产生正交悬浮磁场的α轴方向悬浮绕组、β轴方向悬浮绕组,采用独立悬浮绕组控制悬浮力避免了非线性耦合问题,单独控制悬浮电流和励磁电流以实现电机输出与悬浮之间的相互解耦。此方案中电机无法实现轴向悬浮。
3、因此,如何进一步改进无轴承电励磁双凸极电机,使之能够提供轴向功率和悬浮力,成为了需要进一步研究的问题。
技术实现思路
1、本发明的实施例提供一种三自由度悬浮的无轴承双凸极电机及其控制方法,在原无轴承电励磁双凸极电机的基础上,通过轴向定子上的电枢绕组与励磁绕组,使电机能够输出轴向功率,同时实现轴向悬浮控制。
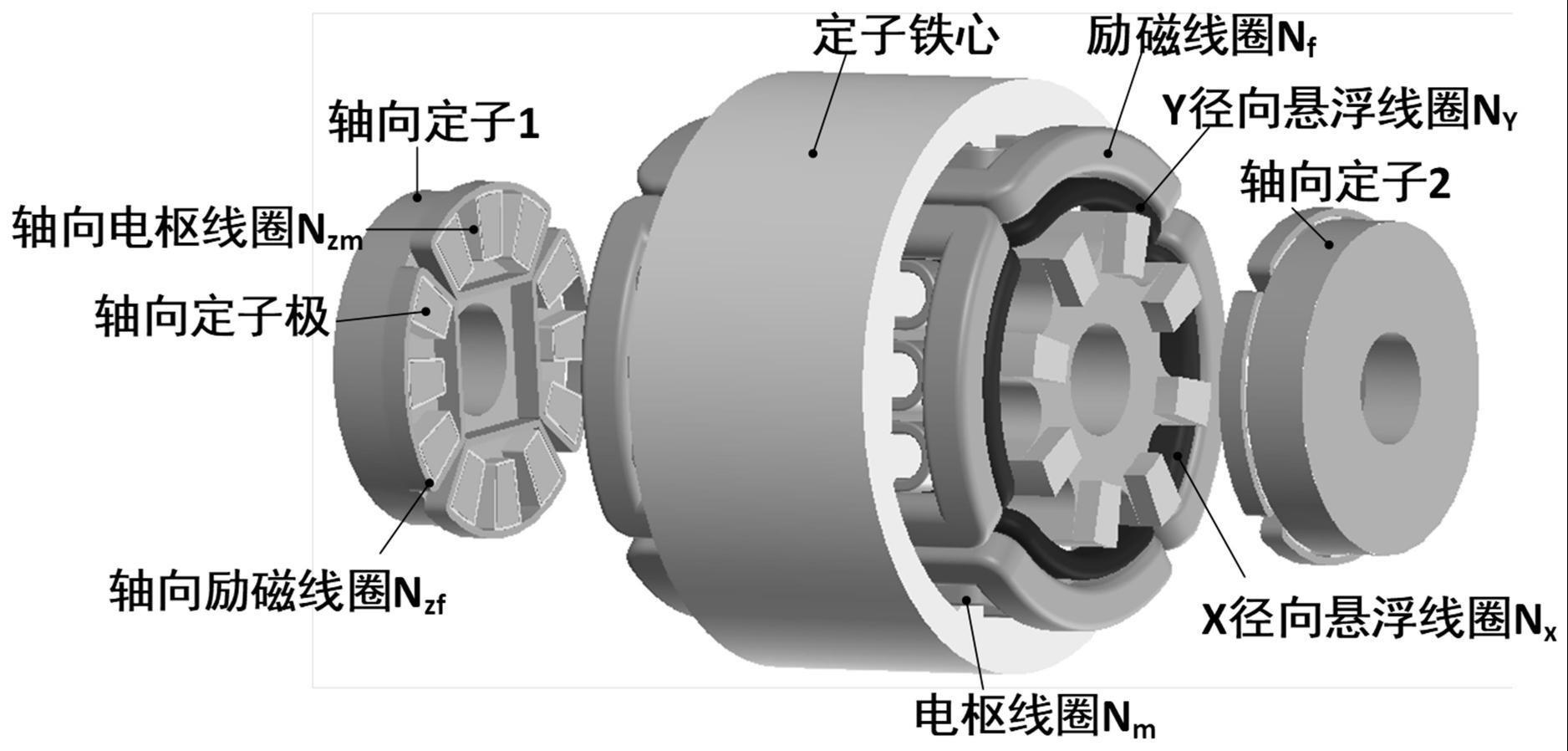
2、为达到上述目的,本发明的实施例采用如下技术方案:设计一种可提供轴向功率与悬浮力的无轴承双凸极电机,采用12/8极结构,可与多电发动机同轴安装。该无轴承双凸极电机包括:定子铁心、转子铁心、电枢线圈、励磁线圈、径向悬浮线圈、轴向定子1、轴向定子2、轴向电枢线圈、轴向励磁线圈。所述定子铁心由12个定子齿极构成,定子齿极采用平行齿结构,有4个大槽和8个小槽,用于放置绕组。所述电枢线圈绕在每个定子齿极上,电枢线圈三个为一组,每相电枢线圈绕线方向与该部分励磁线圈绕线相同;所述励磁线圈放置在定子的大槽中,每三个定子齿极嵌绕一套励磁线圈,共有四套励磁线圈,每套励磁线圈绕制方式相同。所述径向悬浮线圈放置在定子大槽中,每三个定子齿极嵌绕一套径向悬浮线圈,空间径向位置上的悬浮线圈反向串联后分别构成x和y方向悬浮绕组。。所述转子铁心径向共有8个转子齿极,轴向每侧有8个轴向转子齿。所述轴向定子共12个轴向定子齿极;所述轴向电枢线圈采用梯形结构,嵌绕在每个轴向定子极上。每相轴向电枢线圈磁通变化规律与该部分轴向励磁线圈相同,前后两轴向定子采用同一套轴向电枢绕组。每三个轴向定子极嵌绕一套轴向励磁线圈,轴向励磁线圈依次连接后形成轴向励磁绕组,前后两轴向定子采用不同轴向励磁绕组。以轴向定子1的励磁绕组为例,第一套轴向励磁线圈的出线端与顺时针方向的第二套轴向励磁线圈的接线端串联,第二套轴向励磁线圈的出线端与其顺时针方向的第三套轴向励磁线圈的接线端串联,第三套轴向励磁线圈的出线端与其顺时针方向的第四套轴向励磁线圈的接线端串联,四套轴向励磁线圈依次串联后整体构成轴向励磁绕组,轴向励磁绕组的接线端和出线端与轴向励磁绕组控制器接线端相连接。轴向定子2的励磁绕组绕线方法同轴向定子1。作为可提供轴向功率与悬浮力的无轴承双凸极电机的进一步优化方案,所述转子铁心由纯铁构成,转子铁心长度比定子铁心长1/5,转子齿极向外延伸,构成轴向转子齿极,轴向转子齿极由纯铁材料构成,转子形式既可以采用内转子,也可以采用外转子。
3、基于该无轴承双凸极电机的径向悬浮电流的控制方法包括:通过径向位移传感器检测转子实际径向位移,转子实际径向位移与给定径向位移做差后经过pid环节转化为悬浮电流参考值,悬浮电流参考值与实际悬浮电流做差,输出信号作为pi环节的输入信号,pi输出占空比后通过调节径向悬浮电流控制电路中开关器件的开通关断以实现径向悬浮电流的调节,进而控制转子径向位移。
4、基于该无轴承双凸极电机的轴向电枢电流控制方法包括:通过转子角度位置传感器检测转子的实际位置,根据转子角度实际位置调节轴向电枢绕组控制电路中开关器件的通断,从而实现端板电枢电流的换相调节。
5、基于该无轴承双凸极电机的轴向励磁电流控制方法包括:通过轴向位移传感器检测转子实际轴向位移,转子实际轴向位移与给定轴向位移做差后经过pid环节调制,转化为轴向励磁电流参考值,轴向励磁电流参考值与轴向定子1中的轴向励磁电流给定相加,与轴向定子2中的轴向励磁电流给定做差,输出信号分别作为两端轴向励磁电流给定,轴向励磁电流给定与实际轴向励磁电流做差后经过pi环节输出占空比信号,轴向励磁电流控制器根据占空比控制开关管的开通关断以实现轴向励磁电流的调节。其中,所述轴向励磁电流控制电路可以采用全桥逆变电路,所述轴向电枢电流控制电路可以采用三相全桥逆变电路。
6、本发明实施例提供的三自由度悬浮的无轴承双凸极电机及其控制方法,在原无轴承电励磁双凸极电机的基础上,通过轴向定子上的电枢绕组与励磁绕组,使电机能够输出轴向功率,同时实现轴向悬浮控制。该结构不仅继承了无轴承电励磁双凸极电机结构简单可靠、发电控制灵活、偏置磁场由直流电提供等优点,同时轴向电枢绕组可以为电机提供更高的功率密度,轴向励磁绕组产生的磁场可以为电机提供轴向的推力,提高了飞机的轴向负载能力,实现转子轴向悬浮,从而进一步提高了电机系统功率密度和效率。
技术特征:
1.一种三自由度悬浮的无轴承双凸极电机,其特征在于,所述无轴承双凸极电机的组成部分包括:定子铁心、电枢线圈nm、励磁线圈nf、转子铁心、x径向悬浮线圈nx、y径向悬浮线圈ny、轴向定子1、轴向定子2、轴向电枢线圈nzm和轴向励磁线圈nzf;
2.根据权利要求1所述的一种三自由度悬浮的无轴承双凸极电机,其特征在于,轴向定子1与轴向定子2共用一套轴向电枢绕组,其中,在这一套轴向电枢绕组的绕制过程中,轴向电枢绕组在轴向定子1上完成绕制之后,继续在轴向定子2上绕制。
3.根据权利要求2所述的一种三自由度悬浮的无轴承双凸极电机,其特征在于,每一组的定子齿极嵌绕一套径向悬浮线圈,空间径向位置上的悬浮线圈反向串联后分别构成x径向悬浮绕组wx和y径向悬浮绕组wy。
4.根据权利要求1或3所述的一种三自由度悬浮的无轴承双凸极电机,其特征在于所述定子铁心的12个定子齿极,采用平行齿结构,轴向电枢线圈wzm采用梯形结构,嵌绕在每个轴向定子齿极上;
5.根据权利要求1或3所述的一种三自由度悬浮的无轴承双凸极电机,其特征在于,轴向定子2的励磁绕组绕线方式与轴向定子1相同;
6.根据权利要求1或3所述的一种三自由度悬浮的无轴承双凸极电机,其特征在于,所述转子铁心的转子齿极向背离转子轴的方向延伸,构成转子轴向齿极;
7.一种三自由度悬浮的无轴承双凸极电机的控制方法,其特征在于,包括:
8.根据权利要求7所述的控制方法,其特征在于,还包括:
技术总结
本发明实施例公开了一种三自由度悬浮的无轴承双凸极电机及其控制方法,涉及无轴承双凸极电机的技术领域。本发明包括:包括定子铁心、转子铁心、电枢绕组、励磁绕组、X径向悬浮绕组、Y径向悬浮绕组、轴向定子1、轴向定子2、轴向电枢绕组、轴向励磁绕组、电枢绕组控制器、励磁绕组控制器、径向悬浮绕组控制器、轴向电枢绕组控制器以及轴向励磁绕组控制器;轴向电枢线圈嵌绕在每个轴向定子极上,前后两轴向定子采用同一套轴向电枢绕组;每三个轴向定子极嵌绕一套轴向励磁线圈,轴向励磁线圈依次连接后形成轴向励磁绕组,前后两轴向定子采用不同轴向励磁绕组。两套轴向励磁绕组控制器控制轴向励磁电流,为电机提供功率与轴向推力。
技术研发人员:于立,徐秋钰,施于柯,张卓然,陈威
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!