一种光伏清洁机器人用直流电机的保护电路及保护装置的制作方法
1.本实用新型涉及一种光伏清洁机器人用直流电机的保护电路及保护装置。
背景技术:
2.太阳能光伏作为一种可再生清洁能源,已成为当今全球能源变革的重要力量。直流电机作为光伏清洁机器人的驱动装置,是一个非常重要的部分,需要发生异常时快速响应、处理、保护。
3.目前市面上电机保护主要是通过采样电阻采集电流后经过运算放大器进行处理,利用处理器的adc接收已经采集到的信号,最后通过处理器一系列的运算处理后关闭电机信号输出。
4.这种保护方法占用了处理器io口的adc资源,在电机异常的时候,还需要处理器进行一系列的运算处理,实时性不高,会存在刚刚处理完信号的时候电机已经发生堵转烧毁。
技术实现要素:
5.鉴于现有技术中存在的上述问题,本实用新型的主要目的在于提供一种光伏清洁机器人用直流电机的保护电路及保护装置,具有响应快速且安全可靠的特点。
6.本实用新型的技术方案是这样的:
7.一种光伏清洁机器人用直流电机的保护电路,所述光伏清洁机器人包括车身以及驱动装置,所述车身的两侧分别设置有左侧履带和右侧履带,所述驱动装置包括左轮直流电机以及右轮直流电机,所述左轮直流电机和右轮直流电机分别设置在所述车身内部的左侧和右侧,所述左侧履带在所述左轮直流电机的驱动下进行转动,所述右侧履带在所述右轮直流电机的驱动下进行转动,所述保护电路包括采样电路、运算放大器、比较器、定时器以及电平转换芯片,其中:
8.所述采样电路包括第三电阻、第五电阻、第十电阻以及第十四电阻,
9.所述第三电阻的一端和第五电阻的一端分别与所述右轮直流电机相连,所述第三电阻的另一端与第六电阻的一端相连,所述第六电阻的另一端与所述运算放大器的第2引脚相连,所述第五电阻的另一端与第七电阻的一端相连,所述第七电阻的另一端与所述运算放大器的第3引脚相连;
10.所述第十电阻的一端和第十四电阻的一端分别与所述左侧直流电阻相连,所述第十电阻的另一端与第九电阻的一端相连,所述第九电阻的另一端与所述运算放大器的第6引脚相连,所述第十四电阻的另一端与第十一电阻的一端相连,所述第十一电阻的另一端与所述运算放大器的第5引脚相连;
11.所述运算放大器的第7引脚依次经第一肖特基二极管和第十九电阻与所述比较器的第2引脚相连,所述运算放大器的第1引脚依次经第二肖特基二极管和第十九电阻与所述比较器的第2引脚相连,所述比较器的第1引脚与所述定时器的第2引脚相连,所述电平转换电路的第2引脚和和3引脚分别与所述左轮直流电机相连,所述电平转换芯片的第4引脚和
和5引脚分别与所述右轮直流电机相连。
12.所述运算放大器的第1引脚通过第二电阻与所述运算放大器的第2引脚相连,所述运算放大器的第1引脚还依次通过第二电容、第一电容和第一电阻与所述运算放大器的第8引脚相连;所述第一电容的一端和第一电阻的一端分别与第一电源相连;所述第一电容的另一端和第二电容的一端接地。
13.所述运算放大器的第3引脚和第4引脚之间连接有第八电阻,所述运算放大器的第4引脚与第十三电阻的一端相连,且所述第十三电阻的另一端接地。
14.所述运算放大器的第6引脚和第7引脚之间连接有第四电阻,所述运算放大器的第5引脚与第十二电阻的一端相连,且所述十二电阻的另一端接地,所述运算放大器的第7引脚与第三电容的一端相连,且所述第三电容的另一端接地。
15.还包括基准电压源,所述基准电压源包括第二十四电阻、第二十五电阻和第二十六电阻,其中:所述第二十四电阻的一端接地,且所述第二十四电阻的另一端分别与所述比较器的第3引脚和所述第二十五电阻的一端相连,所述第二十五电阻的另一端与所述第二十六电阻的一端相连,所述第二十六电阻的另一端与所述比较器的第5引脚相连,且所述比较器的第5引脚接地。
16.还包括第十七电阻和第六电容,所述第十七电阻的一端和第六电容的一端分别与所述比较器的第2引脚相连,且所述第十七电阻的另一端、第六电容的另一端以及所述比较器的第4引脚接地。
17.还包括第十五电阻和第十六电阻,所述第十五电阻的一端与所述比较器的第1引脚相连,所述第十五电阻的另一端与第一电源相连,所述第十六电阻的一端与所述定时器的第6引脚和第7引脚相连,所述第十六电阻的另一端与第一电源相连。
18.所述比较器的第5引脚与所述定时器的第5引脚之间连接有第八电容和第七电容,且所述第七电容和第八电容的一端接地;所述定时器的第1引脚接地。
19.还包括第四电容、第五电容和第十八电阻,所述第四电容的一端与所述定时器的第8引脚相连,所述定时器的第八引脚与第一电源相连;所述电平转换芯片的第20引脚与所述第五电容和第二电源相连,所述定时器的第3引脚与所述电平转换芯片的第20引脚相连;所述第十八电阻的一端与所述定时器的第3引脚相连,且所述第十八电阻的另一端接地。
20.一种光伏清洁机器人用直流电机的保护装置,所述保护装置包括如上述所述的光伏清洁机器人用直流电机的保护电路。
21.本实用新型具有以下优点和有益效果:光伏清洁机器人在运行过程中,通过车身上设置的电路板中的采样电路实时采集右轮直流电机和左轮直流电机的运行电流,当右轮直流电机或左轮直流电机的电流异常,包括过流或堵转,本实用新型实施例提供的保护电路以及保护装置会触发进行保护,具有快速响应的特点,安全可靠性得到提升,进而达到延长左轮直流电机和右轮直流电机使用寿命的目的。
附图说明
22.图1为本实用新型实施例提供的光伏清洁机器人的右轮直流电机的原理框图。
23.图2为本实用新型实施例提供的光伏清洁机器人的左轮直流电机的原理框图。
24.图3为本实用新型实施例提供的采样电路的结构示意图。
25.图4为本实用新型实施例提供的运算放大器的结构示意图。
26.图5为本实用新型实施例提供的比较器和定时器的结构示意图。
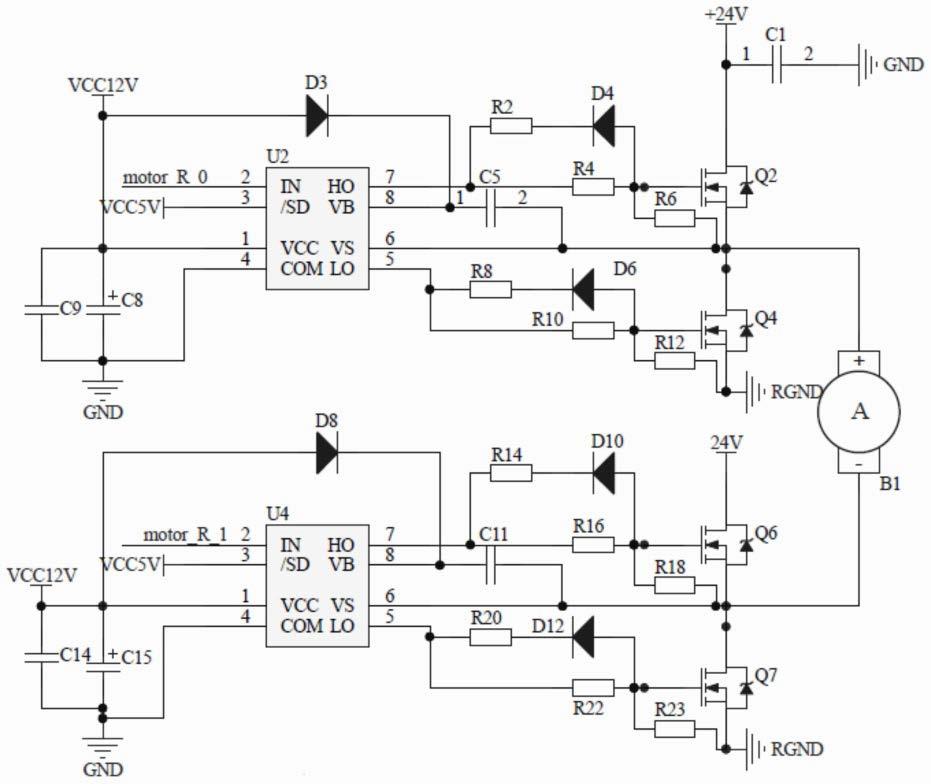
27.图6为本实用新型实施例提供的电平转换芯片的结构示意图。
具体实施方式
28.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
31.下面将参照附图和具体实施例对本实用新型作进一步的说明。
32.如图1至图6所示:为本实用新型实施例提供的光伏清洁机器人用直流电机的保护电路,所述光伏清洁机器人包括车身以及驱动装置,所述车身的两侧分别设置有左侧履带和右侧履带,所述驱动装置包括左轮直流电机以及右轮直流电机,所述左轮直流电机和右轮直流电机分别设置在所述车身内部的左侧和右侧,所述左侧履带在所述左轮直流电机的驱动下进行转动,所述右侧履带在所述右轮直流电机的驱动下进行转动,所述保护电路包括采样电路、运算放大器u1、比较器u3a、定时器u4以及电平转换芯片,其中:
33.所述采样电路包括第三电阻r3、第五电阻r5、第十电阻r10以及第十四电阻r14,
34.所述第三电阻r3的一端和第五电阻r5的一端分别与所述右轮直流电机相连,所述第三电阻r3的另一端与第六电阻r6的一端相连,所述第六电阻r6的另一端与所述运算放大器u1的第2引脚相连,所述第五电阻r5的另一端与第七电阻r7的一端相连,所述第七电阻r7的另一端与所述运算放大器u1的第3引脚相连;
35.所述第十电阻r10的一端和第十四电阻r14的一端分别与所述左侧直流电阻相连,所述第十电阻r10的另一端与第九电阻r9的一端相连,所述第九电阻r9的另一端与所述运算放大器u1的第6引脚相连,所述第十四电阻r14的另一端与第十一电阻r11的一端相连,所述第十一电阻r11的另一端与所述运算放大器u1的第5引脚相连;
36.所述运算放大器u1的第7引脚依次经第一肖特基二极管d1和第十九电阻r19与所述比较器u3a的第2引脚相连,所述运算放大器u1的第1引脚依次经第二肖特基二极管d2和第十九电阻r19与所述比较器u3a的第2引脚相连,所述比较器u3a的第1引脚与所述定时器u4的第2引脚相连,所述电平转换电路的第2引脚和和3引脚分别与所述左轮直流电机相连,所述电平转换芯片的第4引脚和和5引脚分别与所述右轮直流电机相连。
37.上述运算放大器u1的型号为lm358,上述比较器u3a的型号为lm393,上述定时器u4的型号为ne555,上述电平转换芯片的型号为74lvc245芯片。
38.所述运算放大器u1的第1引脚通过第二电阻r2与所述运算放大器u1的第2引脚相连,所述运算放大器u1的第1引脚还依次通过第二电容c2、第一电容c1和第一电阻r1与所述运算放大器u1的第8引脚相连;所述第一电容c1的一端和第一电阻r1的一端分别与第一电源vcc5v相连;所述第一电容c1的另一端和第二电容c2的一端接地。
39.所述运算放大器u1的第3引脚和第4引脚之间连接有第八电阻r8,所述运算放大器u1的第4引脚与第十三电阻r13的一端相连,且所述第十三电阻r13的另一端接地。
40.所述运算放大器u1的第6引脚和第7引脚之间连接有第四电阻r4,所述运算放大器u1的第5引脚与第十二电阻r12的一端相连,且所述十二电阻r12的另一端接地,所述运算放大器u1的第7引脚与第三电容c3的一端相连,且所述第三电容c3的另一端接地。
41.本实用新型实施例提供的光伏清洁机器人用直流电机的保护电路,还包括基准电压源,所述基准电压源包括第二十四电阻r24、第二十五电阻r25和第二十六电阻r26,其中:所述第二十四电阻r24的一端接地,且所述第二十四电阻r24的另一端分别与所述比较器u3a的第3引脚和所述第二十五电阻r25的一端相连,所述第二十五电阻r25的另一端与所述第二十六电阻r26的一端相连,所述第二十六电阻r26的另一端与所述比较器u3a的第5引脚相连,且所述比较器u3a的第5引脚接地。
42.本实用新型实施例提供的光伏清洁机器人用直流电机的保护电路,还包括第十七电阻r17和第六电容c6,所述第十七电阻r17的一端和第六电容c6的一端分别与所述比较器u3a的第2引脚相连,且所述第十七电阻r17的另一端、第六电容c6的另一端以及所述比较器u3a的第4引脚接地。
43.本实用新型实施例提供的光伏清洁机器人用直流电机的保护电路,还包括第十五电阻r15和第十六电阻r16,所述第十五电阻r15的一端与所述比较器u3a的第1引脚相连,所述第十五电阻r15的另一端与第一电源vcc5v相连,所述第十六电阻r16的一端与所述定时器u4的第6引脚和第7引脚相连,所述第十六电阻r16的另一端与第一电源vcc5v相连。
44.所述比较器u3a的第5引脚与所述定时器u4的第5引脚之间连接有第八电容c8和第七电容c7,且所述第七电容c7和第八电容c8的一端接地;所述定时器u4的第1引脚接地。
45.本实用新型实施例提供的光伏清洁机器人用直流电机的保护电路,还包括第四电容c4、第五电容c5和第十八电阻r18,所述第四电容c4的一端与所述定时器u4的第8引脚相连,所述定时器u4的第八引脚与第一电源vcc5v相连;
46.所述电平转换芯片的第20引脚与所述第五电容c5和第二电源vcc3v相连,所述定时器u4的第3引脚与所述电平转换芯片的第20引脚相连;
47.所述第十八电阻r18的一端与所述定时器u3的第3引脚相连,且所述第十八电阻r18的另一端接地。
48.本实用新型实施例还提供的一种光伏清洁机器人用直流电机的保护装置,所述保护装置包括如上述所述保护电路。
49.光伏清洁机器人在运行过程中,通过车身上设置的电路板中的采样电路实时采集右轮直流电机和左轮直流电机的运行电流,当右轮直流电机或左轮直流电机的电流异常,具体包括过流或堵转,本实用新型实施例提供的保护电路以及保护装置会触发进行保护。
50.具体的,右轮直流电机和左轮直流电机分别通过4个0.05欧姆的采样电阻,也即右轮直流电机通过第三电阻r3和第五电阻r5进行采样,以及左轮直流电机通过第十电阻r10和第十四电阻r14进行采样,然后得到的采样电流分别通过第六电阻r6、第七电阻r7和第九电阻r9、第十一电阻r11流经运算放大器u1内部,运算放大器u1内部将实时信号进行放大处理后各自通过一个第一肖特基二极管d1和第二肖特基二极管d2,然后通过第十九电阻r19发送到比较器u3a并与基准电压源中的第二十四电阻r24、第二十五电阻r25以及第二十六电阻r26所产生的基准电压进行比较,当左轮直流电机或右轮直流电机异常时,比较器u3a输出电平发生翻转,将翻转信号发送定时器u4,所述定时器u4最后关闭电平转换芯片以将驱动信号断开。
51.当左轮直流电机或右轮直流电机被关闭且停止不动后,左轮直流电机上的左侧电机编码器或右轮直流电机上的右侧电机编码器在1s没有接收到相应的电机信号时,光伏清洁机器人会报警并关闭整个驱动装置。上述左侧电机编码器以及右侧电机编码器均采用1024线正交解码编码器,与驱动装置的齿轮比为1:2。
52.本实用新型实施例还提供的一种光伏清洁机器人用直流电机的保护装置,其没有经过第一微处理器u1、第二微处理器u2、第三微处理器u3以及第四微处理器u4的任何处理,减少了第一微处理器u1、第二微处理器u2、第三微处理器u3以及第四微处理器u4上io接口的使用,同样减轻了第一微处理器u1、第二微处理器u2、第三微处理器u3以及第四微处理器u4的负载,且在左轮直流电机或右轮直流电机出现异常情况下实时性很高。最后由左侧电机编码器和/或右侧电机编码器辅助关机,从而达到保护左轮直流电机或右轮直流电机,进而使光伏清洁机器人的驱动装置更加稳定可靠。
53.最后应说明的是:以上所述的各实施例仅用于说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1