一种多电源输入自适应快速响应稳定输出控制电源系统的制作方法
1.本技术涉及逆变焊电源和送丝机电源控制的领域,尤其是涉及一种多电源输入自适应快速响应稳定输出控制电源系统。
背景技术:
2.逆变式弧焊电源,是一种新型的焊接电源。用于提供电源至逆变焊焊机。气保焊指二氧化碳或氩气保护的焊接方法,不用焊条用焊丝。co2焊效率高,氩气保护焊主要焊铝、钛、不锈钢等材料。气保焊分体送丝电源是用于提供电源至气保焊送丝机至气保焊送丝机。
3.相关技术中,提供电源信号的可能是工频变压器交流电源,直流电源,中频、高频脉冲变压器等。当输出负载为容性和感性负载时,如:电容,电感,电机,特别为电机时,由于工作高速运转,电源关闭时,有惯性还会继续运转,容易继续进行焊接作业。
技术实现要素:
4.为了快速响应于电源关断动作,降低负载继续动作的概率,本技术提供一种多电源输入自适应快速响应稳定输出控制电源系统。
5.本技术提供的一种多电源输入自适应快速响应稳定输出控制电源系统,采用如下的技术方案:
6.一种多电源输入自适应快速响应稳定输出控制电源系统,包括:
7.电源输入端,配置为第一插件cn1,用于接入电源信号;
8.自适应调节电路,包括第一开关件和第二开关件,所述第一开关件信号连接于所述电源输入端,所述第二开关件信号连接于所述第一开关件;
9.脉宽调制电路,与所述第一开关件信号连接,输出pwm波形;
10.时序控制电路,与所述脉宽调制电路、所述第一开关件和所述第二开关件均信号连接;所述时序控制电路输出触发信号至所述脉宽调制电路,所述时序控制电路与所述第一开关件之间传输电压信号,所述时序控制电路与所述第二开关件之间传输制动信号;
11.输出负载端,配置为第二插件cn2,与所述第一开关件、所述时序控制电路以及所述第二开关件均信号连接;以及,
12.手动调节端,与所述时序控制电路信号连接,用于输出是否需要给定输出电压信号。
13.通过采用上述技术方案,当负载需要运行时,电源信号经由电源输入端输入,使得第一开关件导通,而后信号传输至时序控制电路,形成控制反馈,闭环控制;当输入电源供电变化或不稳定时,时序控制电路运算处理后,给到脉宽调制电路,控制pwm信号脉宽占空比,控制输出电压稳定,输出负载端输出。当手动调节端输出不需要给定输出电压信号(即需要关断电源信号)时,自适应调节电路会加速放电,使输出负载端短路,时序控制电路输出电压变为0v,进而使得负载停止运行,从而实现自适应快速响应稳定输出控制电源信号的目的。
14.优选的,所述自适应调节电路包括整流单元,所述整流单元配置为桥式整流电路;
15.当输入电源为中频或者高频交流信号时,桥式整流电路的二极管配置为快速恢复二极管;当输入电源为工频变压器或直流电源输入供电时,桥式整流电路的二极管配置为快速恢复二极管或者普通二极管。
16.通过采用上述技术方案,对输入电源信号先进行整流,实现将交流信号转换为直流信号的目的,便于电流后续的导通控制等动作。
17.优选的,所述自适应调节电路还包括串联的限流单元和滤波单元,所述限流单元由至少一个电阻器组成,所述滤波单元包括至少一个电容器,所述限流单元远离所述滤波单元的一端信号连接于所述整流单元的输出端;所述滤波单元的输出端信号连接于所述第一开关件的输入端。
18.通过采用上述技术方案,通过限流单元和滤波单元对信号进行预处理,使得数去第一nmos管q1的信号能够更加稳定。
19.优选的,所述第一开关件配置为第一nmos管q1,所述第一nmos管q1的漏极信号连接于所述滤波单元,栅极信号连接于脉宽调制电路,源极信号连接于所述时序控制电路和所述第二插件cn2。
20.通过采用上述技术方案,当滤波单元输出信号至第一nmos管q1时,第一nmos管q1导通,并传输信号至时序控制电路,而后时序控制电路发生动作,实现开关的功能。
21.优选的,所述第一nmos管q1的源极与所述时序控制电路之间信号连接有第三稳压管zd3的阴极,所述第三稳压管zd3的阳极接地vss。
22.通过采用上述技术方案,第三稳压管zd起到稳压的作用,使得第一nmos管q1的输出信号能够更加稳定的传输至时序控制电路。
23.优选的,所述第二开关件配置为第四nmos管q4,所述第四nmos管q4的漏极信号连接于所述时序控制电路和第二插件cn2,栅极信号连接有电压信号vcc,源极信号连接于所述时序控制电路和第二插件cn2。
24.通过采用上述技术方案,当需要关断时,时序控制电路控制脉宽调制电路变为低电平信号,而后第一nmos管q1关断;而后时序控制电路输出的制动信号由高电平转为低电平,使得第四nmos管q4导通,加速第二插件cn2放点短路,以完成关断动作。
25.优选的,所述第四nmos管q4的栅极信号连接有第十七电阻器r17和第二十一电阻器r21之间,所述第十七电阻器r17和所述第二十一电阻器r21之间还信号连接于所述时序控制电路;所述第十七电阻器r17远离所述第二十一电阻器r21的一端接电压信号vcc,第二十一电阻器r21远离所述第十七电阻器r17的一端信号连接于所述第二插件cn2。
26.通过采用上述技术方案,第十七电阻器r17和第二十一电阻器r21之间的连接点作为第四nmos管q4栅极的输入信号,是第四nmos管q4能否导通的关键。
27.优选的,所述第四nmos管q4的源极还信号连接有第十九电阻器r19和第二十电阻器r20,所述第十九电阻器r19和所述第二十电阻器r20并联,且所述第十九电阻器r19和所述第二十电阻器r20远离所述第四nmos管q4的一端均信号连接第二插件cn2。
28.通过采用上述技术方案,第十九电阻器r19和第二十电阻器r20为限流电阻器,稳定第四nmos管q4输出的信号,从而使得负载得到更加稳定的电源信号。
29.综上所述,本技术包括以下至少一种有益技术效果:
30.1.当负载需要运行时,电源信号经由电源输入端输入,使得第一开关件导通,而后信号传输至时序控制电路,形成控制反馈,闭环控制;当输入电源供电变化或不稳定时,时序控制电路运算处理后,给到脉宽调制电路,控制pwm信号脉宽占空比,控制输出电压稳定,输出负载端输出;当手动调节端输出不需要给定输出电压信号(即需要关断电源信号)时,自适应调节电路会加速放电,使输出负载端短路,时序控制电路输出电压变为0v,进而使得负载停止运行,从而实现自适应快速响应稳定输出控制电源信号的目的;
31.2.对输入电源信号先进行整流,实现将交流信号转换为直流信号的目的;通过限流单元和滤波单元对信号进行预处理,使得数去第一nmos管q1的信号能够更加稳定;
32.3.当滤波单元输出信号至第一nmos管q1时,第一nmos管q1导通,并传输信号至时序控制电路,而后时序控制电路发生动作,实现开关的功能;当需要关断时,时序控制电路控制脉宽调制电路变为低电平信号,而后第一nmos管q1关断;而后时序控制电路输出的制动信号由高电平转为低电平,使得第四nmos管q4导通,加速第二插件cn2放点短路,以完成关断动作。
附图说明
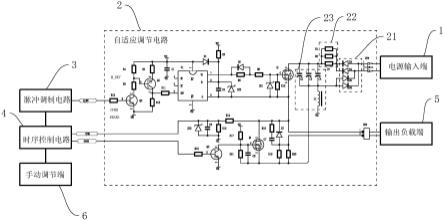
33.图1是本技术实施例中的电路图。
34.附图标记:1、电源输入端;2、自适应调节电路;21、整流单元;22、限流单元;23、滤波单元;3、脉宽调制电路;4、时序控制电路;5、输出负载端;6、手动调节端。
具体实施方式
35.以下结合附图1对本技术作进一步详细说明。
36.本技术实施例公开一种多电源输入自适应快速响应稳定输出控制电源系统。参照图1,一种多电源输入自适应快速响应稳定输出控制电源系统包括电源输入端1、自适应调节电路2、脉宽调制电路3、时序控制电路4、输出负载端5以及手动调节端6。
37.详述的,电源输入端1配置为第一插件cn1,本技术实施例中,第一插件cn1可配置为三孔插接件,主要用于接入电源信号。
38.进一步的,自适应调节电路2包括整流单元、限流单元22、滤波单元23、第一开关件以及第二开关件。
39.本技术实施例中的整流单元设置为全波桥式整流电路,主要由四个二极管d3、d4、d5和d6组成。由于电源的不同,二极管需要做相应的改变,如:当输入电源为中频或者高频交流信号时,桥式整流电路的二极管配置为快速恢复二极管;当输入电源为工频变压器或直流电源输入供电时,桥式整流电路的二极管配置为快速恢复二极管或者普通二极管。
40.整流单元的输出端信号连接于限流单元22,限流单元22在本技术实施例中主要配置为三个并接的电阻器r1、r3以及r7,用于实现限流的功能,保持信号传输的稳定性。
41.滤波单元23的输入端信号连接于限流单元22的输出端,滤波单元23在本技术实施例中主要采用三个电解电容器c2、c3、c4以及铁芯电感器l1。其中,三个电解电容器c2、c3、c4并接,且一端接限流单元22的输出端,另一端接整流单元远离限流单元22一端的输出端。铁芯电感器l1一端接整流单元远离限流单元22一端的输出端,另一端接地vss。
42.第一开关件在本技术实施例中配置为第一nmos管q1。第一nmos管q1的漏极信号连
接于三个电解电容器c2、c3、c4靠近限流单元22的一端,栅极信号连接于脉宽调制电路,源极信号连接于时序控制电路4和输出负载端5。
43.第一nmos管q1的源极与时序控制电路4之间信号连接有串接的第十四电阻器r14、并接的第十五电阻器r15、第六电容器c6以及第三稳压管zd3的阴极,第十五电阻器r15、第六电容器c6以及第三稳压管zd3的阳极接地vss。
44.相似的,第二开关件配置为第四nmos管q4。
45.详述的,第四nmos管q4的漏极信号连接于第一nmos管q1与第十四电阻器r14之间和输出负载端5。
46.第四nmos管q4的栅极信号连接有第十七电阻器r17和第二十一电阻器r21之间,第二十一电阻器r21并接有第八电容器c8;第十七电阻器r17远离第二十一电阻器r21的一端接电压信号vcc,第二十一电阻器r21远离第十七电阻器r17的一端信号连接于输出负载端5。
47.第十七电阻器r17和第二十一电阻器r21之间还信号连接第五npn三极管q5的集电极,第五npn三极管q5发射极接地vss,第五npn三极管q5的基极连接第十八电阻器r18后连接于时序控制电路4。
48.第四nmos管q4的源极信号连接有第十九电阻器r19和第二十电阻器r20,第十九电阻器r19和第二十电阻器r20并联,且第十九电阻器r19和第二十电阻器r20远离第四nmos管q4的一端均信号连接输出负载端5。
49.输出负载端5配置为第二插件cn2,第二插件cn2设置为二孔插接件,且两个接口分别为接口1和接口2,第一nmos管q4的源极和第四nmos管q4的漏极均信号连接于接口1,第四nmos管q4的源极信号连接于接口2。
50.第二插件cn2的接口1和接口2之间还信号连接有第七二极管d7,第七二极管d7的两端还并联有串接的第十六电阻器r16和第七电容器c7。
51.脉宽调制电路3输出信号m_drv,通过第三npn三极管q3和第二pnp三极管等元器件后,与第一nmos管q1的栅极信号连接,脉宽调制电路3在时序控制电路4的控制下输出pwm波形。
52.时序控制电路4有三个输出端,第一个与脉宽调制电路3信号连接,用于控制脉宽调制电路3输出pwm波形;第二个输出信号upbm至第十四电阻器r14;第三个输出制动信号brake至第十八电阻器r18。
53.手动调节端6与时序控制电路4信号连接,输出是否需要给定输出电压信号的动作,而后时序控制电路4收到手动调节端6的输出信号。这里的给定输出电压信号是指负载需要的电压信号,需要给定输出电压信号是指负载需要运行,不需要给定输出电压信号是指负载需要停止动作。
54.本技术实施例一种多电源输入自适应快速响应稳定输出控制电源系统的实施原理为:时序控制电路4接收手动调节端6的参数,通过时序处理,给定到脉宽调制电路,产生脉宽pwm信号m_drv,连接到第一插件cn1两端。经二极管d3、d4、d5和d6构成全波桥式整流;经限流电阻器r1,r3,r7,电解电容器c2,c3,c4进行滤波储能,转换成直流平稳的电源;由u1_6,7驱动控制,经电路连接到第一nmos管q1的栅极和源极,控制第一nmos管q1相应工作,经电阻器r14、r15、电容器c6和稳压管zd3电路,输出电压分压比例后,信号ufbm反馈给时序
控制电路4,形成控制反馈,闭环控制。当输入电源供电变化或不稳定时,时序控制电路4运算处理后,给到脉宽调制电路,控制pwm信号脉宽占空比,控制输出电压稳定,第二插件cn2两端输出。
55.当接收到手动调节给定输出电压不需要时,由时序控制电路4,控制脉宽调制电路关闭,信号m_drv变为低电平,控制后第一nmos管q1关断,延时几个毫秒后(确保场效应管q1完成关闭后在启动场效应管q4,防止两个器件同时工作,直通损坏,可直接通过时序控制电路4设置),时序控制电路4输出的信号brake由高电平变为低电平,而后使第二nmos管q4导通工作,加速第二插件cn2放电短路,第十九电阻器r19和第二十电阻器r20起到限流作用。当检测到信号ufbm为0v后,时序控制电路4输出的信号brake由低电平变为高电平,使得第二nmos管q4截止。需要输出电压时,重述以上工作时序流程。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1