磁浮小车牵引系统的制作方法
1.本技术涉及辅助教学仪器技术领域,特别是涉及一种磁浮小车牵引系统。
背景技术:
2.近年来,随着经济的不断增长,我国城市轨道交通发展需求巨大,中低速磁悬浮列车因其噪音低、性能好、无轮轨磨耗、造价低等优势将使得磁悬浮列车将成未来城市的新选择。中低速磁浮交通已成为各地轨道交通规划中的重要选择项,可以预计国内将来需要大量基于磁浮技术的轨道交通从业人员,但磁浮列车对很多人来说还很神秘,国内高校针对其相关的教学试验设备基本处于空缺状态。
3.现有的基于磁悬浮技术的控制试验小球、试验小车等教学实验平台,功能相对单一,与实际列车复杂机电系统的差距较大,且不具备牵引功能,不能通过实际运动过程植入有效扰动信号,无法有效支撑悬浮控制算法的学习、研究和控制学科高速发展的需求。磁浮小车实验系统采用国内中低速磁浮列车结构等比例缩小设计,而国内没有与之配套可用的磁浮小车牵引系统。
技术实现要素:
4.基于此,针对上述技术问题,提供了一种磁浮小车牵引系统。
5.一种磁浮小车牵引系统,所述系统包括:
6.变流器,包括控制单元和逆变单元;
7.直线电机,连接所述变流器;
8.所述变流器连接磁浮小车中控系统,用于接收所述中控系统传输的牵引、制动或换向指令,通过所述控制单元控制所述直线电机来完成所述指令的执行;
9.所述控制单元控制所述逆变单元将输入的48v直流电转换为对称三相交流电,给所述直线电机供电;
10.所述逆变单元包括高频滤波电容和逆变制动单元;所述逆变制动单元包括逆变制动开关,所述逆变制动开关为mos管。
11.在其中一个实施例中,所述直线电机由2台直线感应电机并联组成。
12.在其中一个实施例中,所述系统还包括接近开关;所述接近开关连接所述变流器,用于向所述中控系统发送换向信号,所述中控系统向变流器发送换向指令,所述控制单元控制所述直线电机完成所述换向指令。
13.在其中一个实施例中,所述控制单元接收所述中控系统发送的牵引指令,控制所述直线电机产生电磁牵引力驱动磁浮小车移动。
14.在其中一个实施例中,所述变流器还包括斩波单元,所述斩波单元包括斩波制动电阻和斩波制动开关;所述斩波制动开关为mos管;
15.所述控制单元接收中控系统发送的制动指令,通过控制所述斩波制动开关的导通和关断来控制所述斩波制动电阻的工作,用于稳定磁浮小车制动时所述直线电机产生的回
馈能量,降低牵引系统的电压。
16.在其中一个实施例中,所述控制单元包括stm32f405主控芯片。
17.在其中一个实施例中,所述逆变单元还包括:
18.温度传感器;所述温度传感器连接所述控制单元,所述控制单元接收温度传感器的温度信号控制牵引系统维持正常温度;
19.电压传感器;
20.电流传感器。
21.在其中一个实施例中,所述系统还包括调试接口;所述调试接口用于连接外部嵌入式平台,建立所述外部嵌入式平台与所述控制单元的通讯连接,通过所述外部嵌入式平台监控牵引系统的运行状态。
22.上述磁浮小车牵引系统,通过配备变流器和直线电机,通过变流器中控制单元、逆变单元和直线电机的交互实现磁浮小车的运行和全电制动控制,改善了传统技术中的机械制动方式,同时pcb板模块化设计的变流器,使得牵引系统整体上结构相对简单,滤波电容的配备也提高了牵引系统中变流器的抗干扰能力。采用本系统可以解决磁浮小车实验系统牵引问题,提供悬浮牵引运动工况,有效植入实际扰动信号,有力支撑悬浮控制算法的学习与研究。
附图说明
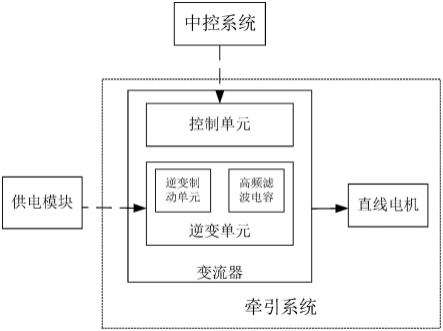
23.图1为一个实施例中磁浮小车牵引系统的结构框图;
24.图2为一个实施例中变流器的主电路图。
具体实施方式
25.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
26.在一个实施例中,如图1所示,提供了一种磁浮小车牵引系统,包括:
27.变流器和直线电机。
28.变流器包括控制单元和逆变单元,牵引变流器整体采用pcb板模块化设计,整体结构相对简单,体积小,重量轻,维护方便。
29.直线电机连接变流器,控制单元控制逆变单元将输入的dc48v电转换为对称三相交流电,给直线电机供电。
30.变流器连接磁浮小车中控系统,用于接收中控系统传输的牵引、制动或换向指令,通过控制单元控制直线电机来完成牵引、制动或换向指令的执行。
31.中控系统主要负责运行速度及相关开关量信号采集、牵引速度控制和牵引运行控制,通过牵引系统上的rs485通信接口与牵引系统进行数据的交互,采集牵引系统的运行数据。
32.逆变单元包括高频滤波电容和逆变制动单元,逆变制动单元包括逆变制动开关,逆变制动开关采用mos管。
33.在本实施例中,牵引系统变流器中的逆变单元集成了三相逆变器的三相桥臂、高
频滤波电容、电压传感器、电流传感器等器件,高频电容主要用于吸收mos开关噪声,滤波电容提供纹波电流。
34.上述磁浮小车牵引系统,通过配备变流器和直线电机,通过变流器中控制单元、逆变单元和直线电机的交互实现磁浮小车的运行和全电制动控制,改善了传统技术中的机械制动方式,同时pcb板模块化设计的变流器,使得牵引系统整体上结构相对简单,滤波电容的配备也提高了牵引系统中变流器的抗干扰能力。
35.在一个实施例中,直线电机由2台直线感应电机并联组成。
36.具体的,牵引系统还包括接近开关,接近开关连接变流器,用于向中控系统发送换向信号,中控系统接收换向信号后向变流器发送换向指令,控制单元控制直线电机完成换向指令。
37.接近开关主感应到磁浮小车浮岛上的换向感应块时,将换向信息发送给中控系统,中控系统向变流器发出换向指令,变流器中的控制单元控制直线电机施加反向牵引力,当车辆减速为零时,在牵引力方向仍不变时,车辆就会开始反向运行。
38.具体的,控制单元接收所中控系统发送的牵引指令,控制直线电机产生电磁牵引力驱动磁浮小车移动。
39.具体的,变流器还包括斩波单元,斩波单元包括斩波制动电阻和斩波制动开关,斩波制动开关为mos管。
40.控制单元接收中控系统发送的制动指令,通过控制斩波制动开关的导通和关断来控制斩波制动电阻的工作,用于稳定磁浮小车制动时直线电机产生的回馈能量,降低牵引系统的电压。
41.斩波部分的电路由一个mos和制动放电电阻构成,当制动时电机回馈能量超过装置本身的吸收容量时,直流中间回路的电压会出现过高的情况,此时通过斩波电路将电压稳定到一定的值,即通过控制斩波单元中的mos管的导通和关断来控制制动电阻的工作。
42.在一个实施例中,控制单元包括stm32f405主控芯片。
43.相比于实际投入使用的磁悬浮列车,磁浮小车的轨道长度要短很多,由此可以知道,磁浮小车的速度控制范围要更小更精细,同时磁浮小车的制动距离也要更短,因此在设计磁浮小车时,需要重视磁浮小车的控制单元的牵引和制动性能。
44.在一个实施例中,逆变单元还包括温度传感器、电压传感器和电流传感器。
45.温度传感器连接控制单元,控制单元接收温度传感器的温度信号控制牵引系统维持正常温度,系统冷却采用自冷散热方式,逆变单元的主电路见图2,其中6个mos管构成两电平三相逆变电路,rch表示斩波单元的制动放电电阻,c1表示高频滤波电容,tv1中的v、a分别表示电压传感器和电流传感器,ctu、ctv和ctw表示电路的三相输出电流检测器。
46.在一个实施例中,牵引系统还包括调试接口,用于连接外部嵌入式平台,建立所述嵌入式平台与控制单元的通讯连接,通过外部嵌入式平台监控牵引系统的运行状态。
47.当牵引系统工作状态异常时,上位机监控平台发出警告提示并显示具体故障信息,控制牵引系统的启停。
48.牵引系统还预留了can接口和1路a/d接口和6路i/o。
49.在一个实施例中,提供牵引系统设计性能指标和设计参数,如下表:
50.表1设计性能指标
51.设计速度0.2m/s,0.4m/s(max)最大加速度≥0.1m/s2平均减速度最大常用制动≥0.1m/s2爬坡能力能在7
‰
坡道上启动制动方式全电制动控制方式,无机械制动停车
52.表2设计参数
53.额定输出电流6a(有效值)最大输出电流12a(有效值)最大输出容量600va输出电压三相ac0~32v(相电压有效值)输出频率0~200hz开关频率pwm 2khz电压上升速率》0.1kv/us
54.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
55.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1